目录
一阶边缘检测基础算子(First Order Edge Detection)
一阶边缘检测(First Order Edge Detection)
摘要
基于边缘检测的分析不易受整体光照强度变化的影响,边缘检测强调的是图像对比度,即亮度上的差别。要检测边缘位置,我们首先可以应用一阶微分,因为一阶微分可以使变化增强;而当信号没有变化时,一阶微分不会有响应。
一阶边缘检测基础算子(First Order Edge Detection)
定义垂直边缘:(E是edge的缩写)
定义水平边缘:
则垂直和水平边缘:(垂直边缘和水平边缘相加)
叫做一阶边缘检测。
模板为:

伪代码:
function edge = basic_difference(inage)
for x = 1:cols-2
for y = 1:rows-2
edge(y,x)=abs(2*image(y,x)-image(y+1,x)-image(y+1,x))
end
end--------------------------------------------------------------------------------------------------------------------------------
改进的一阶边缘检测
泰勒级数分析表明对相邻点的差分处理可以用来估算点的一阶导数

因此改进的一阶差分模板为:

Mx为垂直模板,My为水平模板。
所以改进后的公式为
---------------------------------------------------------------------------------------------------------------------------------
Rorberts交叉算子
是最早的边缘检测算子之一,它实现的是边缘检测,利用两个模板,计算对角线上而不是沿坐标轴的微分。这两个模板分别为:

边缘点Ex,y是在图像点Px,y对这两个模板进行卷积计算得到的两个值中的较大值,公式为:
Roberts交叉算子的应用:

--------------------------------------------------------------------------------------------------------------------------------
Prewitt边缘检测算子
Prewitt算子模板为:

其中Mx是垂直模板,My是水平模板。
对于垂直模板,首先(a)图中最中间阴影部分是我们要求的像素值。它等于它周围的8个像素值做卷积得到,也就是Mx与这九个像素值做内积,像素 P_00 * 1 + P_01 * 0 + P_02 * (-1) + P_10 * 1 + P_11 * 0 + P_12 * (-1) + P_20 * 1 + P_21 * 0 + P_22 * (-1)。 得到Mx(x,y)。(这个符号我也没有看懂代表啥)
对于水平模板,首先(b)图中最中间阴影部分是我们要求的像素值。它等于它周围的8个像素值做卷积得到,也就是Mx与这九个像素值做内积,像素 P_00 * 1 + P_01 * 1 + P_02 * 1 + P_10 * 0 + P_11 * 0 + P_12 * 0 + P_20 * (-1) + P_21 * (-1) + P_22 * (-1)。
然后把Mx(x,y) , My(x,y)的平方和开方得到我们阴影部分就是最中心的那个像素值。这是矢量的求法,(类似于求三角形形的斜边)如下面的式子所示。
边缘强度M表示的是矢量的长度,边缘方向θ表示的是矢量的方向。
Matlab代码
image=double(imread('lizardsmall.png'));
[rows, cols]=size(image)
edge = zeros(rows,cols)
kernelx = [1,0,-1;1,0,-1;1,0,-1]
kernely = [1,1,1;0,0,0;-1,-1,-1]
for x = 2:cols-1
for y = 2:rows-1
tempx = sum(sum(image(y-1:y+1,x-1:x+1) * kernelx,1),2);
tempy = sum(sum(image(y-1:y+1,x-1:x+1) * kernely,1),2);
edge(y,x)=abs(sqrt(tempx*tempx+tempy*tempy));
end
end
imshow(uint8(edge)),title('original');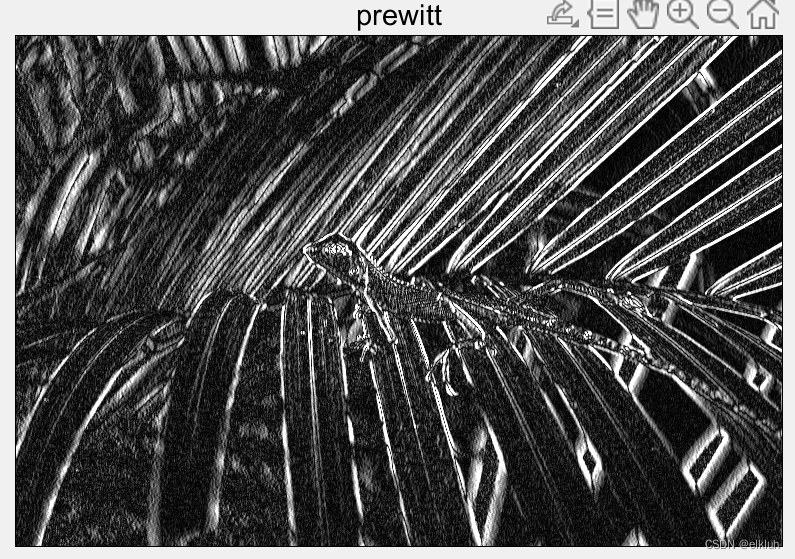
Sobel检测算子:
Prewitt算子模板为:

Sobel算子的每个像素的计算公式和Prewitt相同,就是前面的系数变了。

参考书籍 《Feature extraction and image processing》 Mark S. Nixon and Alberto S. Aguado
中文版,《特征提取与图像处理》