实验源码已经上传CSDN了,需要的可直接下载,链接:https://download.csdn.net/download/weixin_53129688/87694703
实验六 数字PID控制
实验目的:
1、掌握PID控制规律及控制器的实现
2、研究 PID 控制器的参数对系统稳定性及过渡过程的影响。
3、掌握对系统进行PID控制器参数整定的方法。
实验内容:
在串联校正中,比例控制可提高系统开环增益,减少系统稳态误差,提高系统的控制精度,但会降低系统的相对稳定性,甚至可能造成系统不稳定,积分控制可以提高系统的型别,有利于提高系统稳定性能,但积分控制增加了一个开环极点,使信号产生90度的相位滞后,不利于系统的稳定,故不宜采用单一的积分控制器;微分控制规律能反映输入信号的变化趋势,产生有效的早期修正信号,以增加系统的阻尼程度,从而改善系统的稳定性,微分控制增加了一个(-1/τ)的开环零点,有助于系统稳态性能的改善。
比例-积分(PI)控制规律:在串联校正中,PI控制器增加了一个位于原点的开环极点,同时也增加了一个位于s左半平面的开环零点。位于原点的开环极点可以提高系统的型别,减小稳态误差,有利于提高系统稳态性能;负的开环零点可以减小系统的阻尼,缓和PI极点对系统产生的不利影响。PI控制器主要用来改善控制系统的稳态性能。
比例-积分-微分(PID)控制规律:在串联校正中,PID 控制器增加了一个位于原点的开环极点和两个位于s 左半平面的开环零点。除了具有 PI 控制器的优点外,还多了一个负实零点,动态性能比PI 更具有优越性。通常应使积分发生在低频段,以提高系统的稳态性能;而使微分发生在中频段,以改善系统的动态性能。
工程设计中有许多方法,如对于一个特定的被控对象,在纯比例控制的作用下改变比例系数可求出产生临界振荡的振荡周期Tu和临界比例系数Ku。
实验步骤:
- 打开matlab的simulink,选择库浏览器;


2、 在库浏览器中找到阶跃函数,阶跃函数位于库浏览器中的Sources当中,长按左键将之拖至模型中。

3、在库浏览器中找到PID Controller模块,并加入模型中。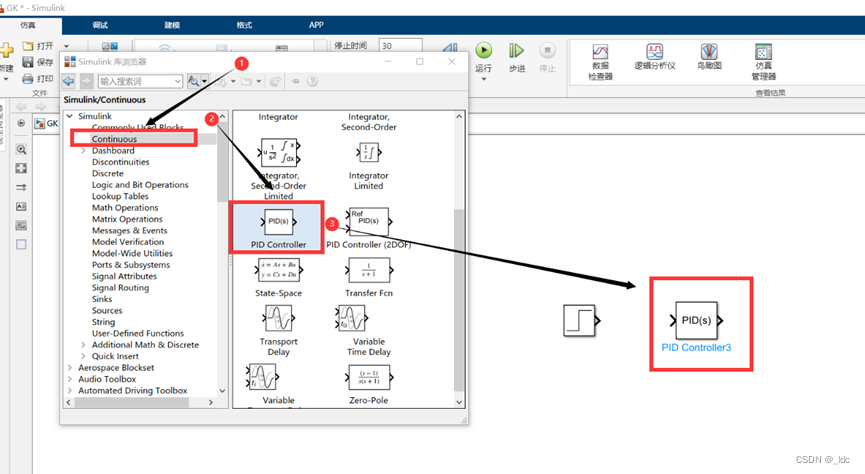
4、将剩余模块加好并修改参数,我构建的模型如下,我将以此模型为例分析PID参数对系统的影响。
5、首先为了观察平滑的曲线,我们先将scope模块的采样时间改成0.01,如图,并且将背景更换,前面实验有讲解,这里就不再演示。
6、然后对PID的值进行设置,为了方便观察,先将建立多条线路并进行不同的参数设定进行对比,如图。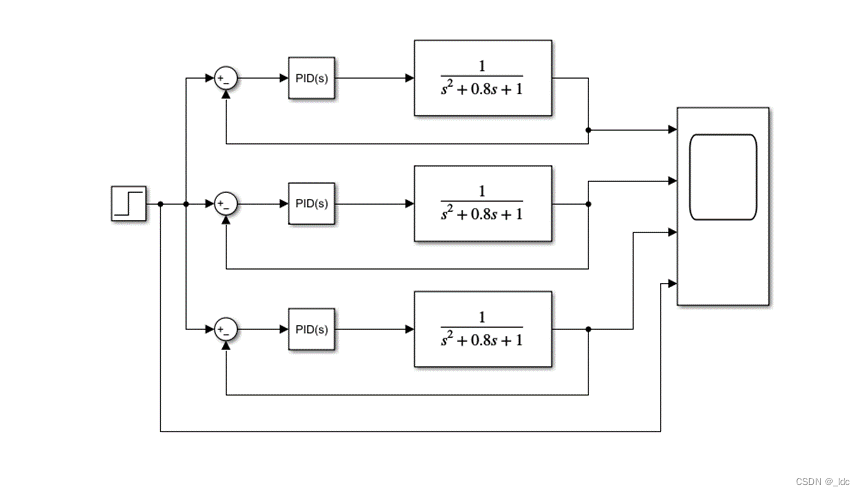
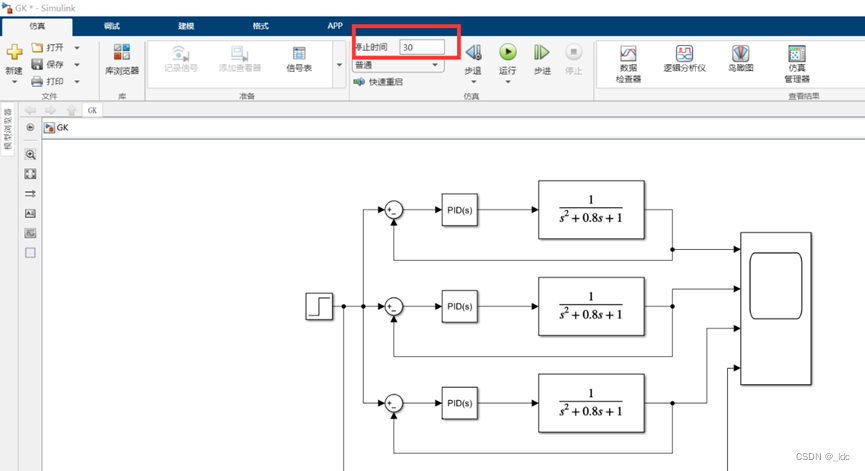
7、先单独改变P值分别为1,3,10,并将停止时间减少成30再运行,观察波形变化,如图。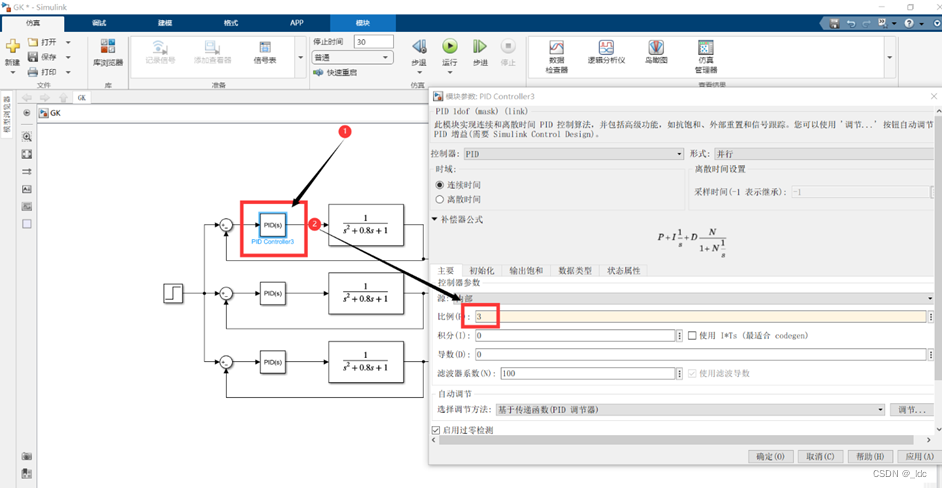
8、可以观察到,随着P的增大,超调量不断增大,静态误差不断减小,但当P增大时震荡幅度也不断变大。
9、可以观察到,当系统稳定时,误差并没有为0,这说明了通过比例控制是没有办法完全消除稳态的误差的,这时候就需要引入积分I。
10、以Kp=10为例,在此基础上增加积分环节,分别设置为0,0.5,5,进行对比观察。如图:
11、为了方便观察,将停止时间改为50,并运行观察,可以观察到,引入I后,系统的余差随着时间越来越小,最终稳定在误差为0的状态。因为从时域上看,只要存在偏差,积分就会不停对偏差积累,因此稳态时误差一定为零。

12、但是通过观察可以发现,随着I的引入且不断增大,系统超调量也不断增大,且稳定时间也在不断变长。说明PI控制系统响应虽然消除了系统响应误差,但是系统响应速度也会变慢,为了提高系统稳定情况下还能提高系统响应速度,可以通过引入微分项来形成PID控制进行改善。
分别设定D参数为0,0.5,5进行对比观察,可以看到当取到合适的Kd时,系统得到了改善。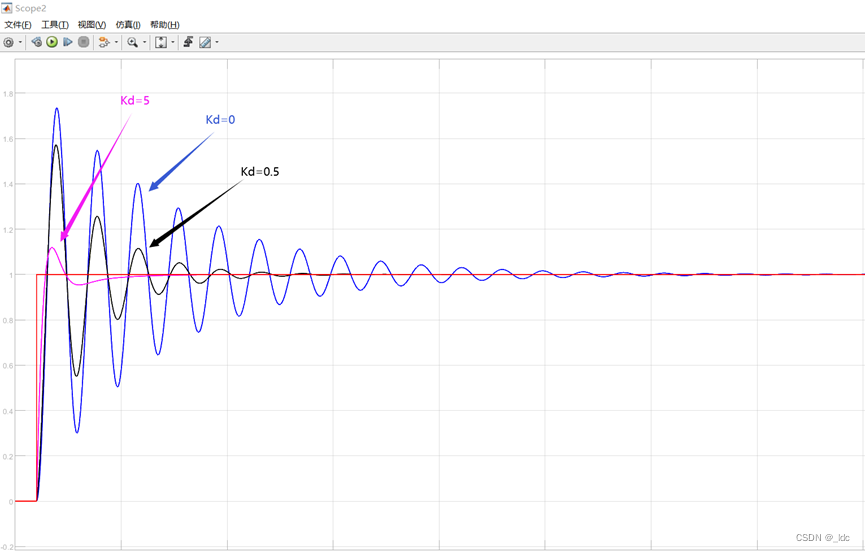
实验小结:
通过实验,我们可以认识到PID三个参数的作用,Kp对系统的影响最大,可以加快调节,能迅速反应误差,从而减小稳态误差;Ki能消除稳态误差;Kd能加大惯性响应速度,减弱超调趋势。将比例、积分、微分三种调节规律结合在一起,只要三项作用的强度配合适当,既能快速调节,又能消除余差,可得到满意的控制效果。