获取图像连通区域的最大内接矩形
1.背景
在做一些图像识别的任务的时候,遇到了一个需求就是获取一个不规则轮廓内的最大内接矩形,需求示例:
一个不规则轮廓里面,想提取最主要的矩形部分。
2.数据准备
1.该图像是由一个轮廓数据生成的,生成上述需求图像的代码如下:
contour = np.array([[ 301, 300],[ 300, 301],[ 300, 626],[ 301, 627],[1071, 627],[1072, 628],[1072, 637],[1073, 638],[1251,638],
[1252, 637],[1252, 628],[1253, 627],[1297, 627], [1298, 626],[1298, 625],[1299, 624],[1788, 624],[1790, 622],[1792,622],
[1793, 621],[2244, 621],[2245, 622],[2247, 622],[2249, 624],[3161, 624],[3162, 625],[3162, 636],[3163, 637],[3433,637],
[3434, 636],[3434, 625],[3435, 624],[4285, 624],[4286, 623],[4286, 378],[4285, 377],[4179, 377],[4178, 376],[4178,322],
[4177, 321],[4168, 321],[4167, 320],[4167, 310],[4166, 309],[4030, 309],[4029, 310],[4029, 320],[4028, 321],[3811, 321],
[3810, 320],[3810, 310],[3809, 309],[3673, 309],[3672, 310],[3672, 320],[3671, 321],[3662, 321],[3661, 322],[3661, 376],
[3660, 377],[3396, 377],[3394, 375],[3230, 375],[3228, 377],[2964, 377],[2963 , 376],[2963 , 322],[2962, 321],[2953, 321],
[2952 , 320],[2952 , 310],[2951, 309],[2816 , 309],[2815 , 310],[2815 , 320],[2814 , 321],[2596 , 321],[2595 , 320],[2595 , 310],
[2594 , 309],[2458, 309],[2457 , 310],[2457 , 320],[2456 , 321],[2447 , 321],[2446 , 322],[2446 , 376],[2445 , 377],[2181 , 377],
[2179 , 375],[2016 , 375],[2014 , 377],[1750 , 377],[1749 , 376],[1749 , 322],[1748 , 321],[1738 , 321],[1737 , 320],[1737 , 310],
[1736, 309],[1601 , 309],[1600 , 310],[1600 , 320],[1599 , 321],[1381 , 321],[1380 , 320],[1380 , 310],[1379 , 309],[1243 , 309],
[1242 , 310],[1242 , 320],[1241 , 321],[1232 , 321],[1231 , 322],[1231, 376],[1230 , 377],[ 966 , 377],[ 964 , 375],[ 801 , 375],
[ 799 , 377],[ 535 , 377],[ 534 , 376],[ 534 , 301],[ 533 , 300]])
import cv2
img = np.zeros((1000, 4600))
cv2.polylines(img, [contour.reshape(-1, 1, 2).astype('int')], True, 255, 10)
cv2.imwrite('xxx/xxx/Desktop/1.png', img)
# 使用上述代码可以生成一张保存在桌面名称为1.png的一张图片,图片的样子就是
# 我粘贴的需求示例里面的图片
# 轮廓数据也是对图像进行边缘检测得到的,记录一下保存成numpy可读的测试数据方式
# np.savetxt('xxx/xxx/output.txt', contour,fmt='%d')
# contour = np.loadtxt('xxx/xxx/output.txt', dtype=int)
3.使用中心外扩的思想
中心外扩的思想只适用于凸多边形的轮廓,当是凹多边形时候需要保证轮廓图形的质心在轮廓内部。具体思想如下:
1.用图像的思想进行查找,以黑色图像为背景,将轮廓部分填充成白色,生成二值图像。
2.取轮廓多边形的质心为起点
3.以图形的质心为起点向四周逐步外扩,逐像素点去寻找是否是联通区域。
注意⚠️:该方法的缺点有2个:
1.就是起点必须在轮廓内,所以当图形是凹多边形的时候很有可能找到的质心在轮廓外,这种情况下这个方法就失效了。
2.找到的轮廓内的最大内接矩形只能是正矩形,当示例的图形轮廓旋转一定角度的时候,其内部的最大内接矩形应该是倾斜矩形,但是该方法找不到想要的结果。
def move_edge(img, edge, edge_id):
"""
扩展边界
:param img: 输入图像,单通道二值图,深度为8
:param edge: 边界数组,存放4条边界值
:param edge_id: 当前边界号
:return: 布尔值,确定当前边界是否可以扩展
"""
nr, nc = img.shape[:2]
if edge_id == 0:
if edge[0] >= nr - 1:
return False, edge
for i in range(edge[3], edge[1] + 1):
if img[edge[0] + 1, i] == 0:
return False, edge
edge[0] += 1
return True, edge
elif edge_id == 1:
if edge[1] >= nc - 1:
return False, edge
for i in range(edge[2], edge[0] + 1):
if img[i, edge[1] + 1] == 0:
return False, edge
edge[1] += 1
return True, edge
elif edge_id == 2:
if edge[2] <= 0:
return False, edge
for i in range(edge[3], edge[1] + 1):
if img[edge[2] - 1, i] == 0:
return False, edge
edge[2] -= 1
return True, edge
else:
if edge[3] <= 0:
return False, edge
for i in range(edge[2], edge[0] + 1):
if img[i, edge[3] - 1] == 0:
return False, edge
edge[3] -= 1
return True, edge
def find_max_inner_rectangle(img, center, move_direction='both'):
"""
求连通区域最大内接矩形
:param img: 输入图像,单通道二值图
:param center: 最小外接矩的中心
:param move_direction: 优先移动的方向,备选参数有 "both"、"horizontal"、"vertical"
:return: bbox,最大内接矩形
"""
edge = [0] * 4
edge[0] = center[1]
edge[1] = center[0]
edge[2] = center[1]
edge[3] = center[0]
is_expand = [1, 1, 1, 1] # 扩展标记位
# 四个方向同时外扩
if move_direction == 'both':
n = 0
while any(is_expand):
edge_id = n % 4
is_expand[edge_id], edge = move_edge(img, edge, edge_id)
n += 1
# 水平方向先外扩
elif move_direction == 'horizontal':
n = 1
while (is_expand[1] or is_expand[3]):
edge_id = n % 4
is_expand[edge_id], edge = move_edge(img, edge, edge_id)
n += 2
edge[3] += 20
edge[1] -= 20
n = 0
while (is_expand[0] or is_expand[2]):
edge_id = n % 4
is_expand[edge_id], edge = move_edge(img, edge, edge_id)
n += 2
edge[3] -= 20
edge[1] += 20
# 竖直方向先外扩
else:
n = 0
while (is_expand[0] or is_expand[2]):
edge_id = n % 4
is_expand[edge_id], edge = move_edge(img, edge, edge_id)
n += 2
edge[2] += 20
edge[0] -= 20
n = 1
while (is_expand[1] or is_expand[3]):
edge_id = n % 4
is_expand[edge_id], edge = move_edge(img, edge, edge_id)
n += 2
edge[2] -= 20
edge[0] += 20
return [edge[3], edge[2], edge[1], edge[0]]
# 需要引入一个python库shapely用来寻找轮廓的质心
from shapely.geometry import Polygon
center = Polygon(contour).centroid
center = list(map(int, [center.x, center.y]))
img = np.zeros((1000, 4600))
cv2.fillPoly(img, [contour.reshape(-1, 1, 2).astype('int')], 255)
res = find_max_inner_rectangle(img, center)
# 得出来的结果就是找到的最大的内接矩形的bbox,包括左上点和右下点
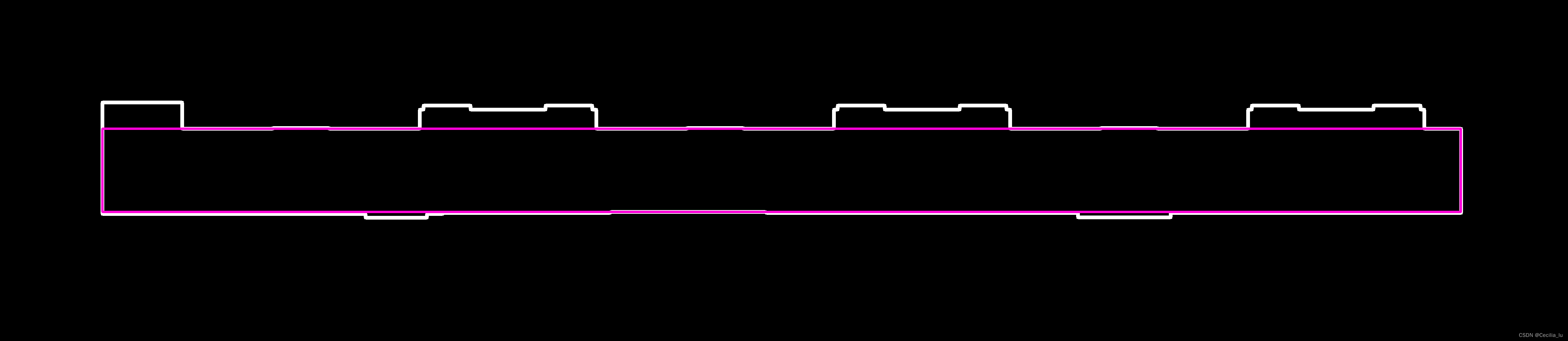
示例代码里面的轮廓使用该方法找到的最大内接矩形结果如图
(玫红色的矩形即为该方法找到的最大内接矩形):
4.使用最大矩形
采用的是leecode题库第85题的思想,在0,1矩阵中寻找最大矩形。
具体的思想过程不赘述可以直接去看题目哈哈。
该方法同样有一个缺点没有办法获取倾斜矩形,也只能在轮廓中获取正矩形。
注意⚠️:使用该思想可以递归获取一个轮廓内的若干个面积大于阈值的矩形。
import numpy as np
def get_max_inner_rectangles(matrix_np: np.ndarray, rectangle_bbox: list, area_value: int, result_list: list,
cur_area: float = float('inf')) -> list:
"""
递归获取空间的多个内接矩形
Args:
matrix_np: 包含空间的底图
rectangle_bbox: 空间的外接矩形
area_value: 最小面积阈值
result_list: 内接矩形列表
cur_area: 当前矩形的面积
Returns:
result_list: 内接矩形列表
"""
xmin, ymin, xmax, ymax = rectangle_bbox
crop_img = matrix_np[ymin:ymax, xmin:xmax] # 通过最大外接矩形,crop包含该空间的区域,优化速度
matrix_list = crop_img.tolist()
row = len(matrix_list)
col = len(matrix_list[0])
height = [0] * (col + 2)
res = 0 # 记录矩形内像素值相加后的最大值
bbox_rec = None # 最大内接矩形bbox
for i in range(row):
stack = [] # 利用栈的特性获取最大矩形区域
for j in range(col + 2):
if 1 <= j <= col:
if matrix_list[i][j - 1] == 255:
height[j] += 1
else:
height[j] = 0
# 精髓代码块 计算最大内接矩形 并计算最大值
while stack and height[stack[-1]] > height[j]:
cur = stack.pop()
if res < (j - stack[-1] - 1) * height[cur]:
res = (j - stack[-1] - 1) * height[cur]
bbox_rec = [stack[-1], i - height[cur], j, i]
stack.append(j)
# 递归停止条件,1.最大内接矩形面积小于阈值;2. 没有最大内接矩形
if cur_area < area_value or not bbox_rec:
return result_list
# 映射到原图中的位置
src_min_x = xmin + bbox_rec[0]
src_min_y = ymin + bbox_rec[1]
src_max_x = xmin + bbox_rec[2]
src_max_y = ymin + bbox_rec[3]
bbox_src_position = [src_min_x, src_min_y, src_max_x, src_max_y]
# 转成np格式,并将已经找到的最大内接矩形涂黑
bbox_cnt = [[bbox_src_position[0], bbox_src_position[1]],
[bbox_src_position[2], bbox_src_position[1]],
[bbox_src_position[2], bbox_src_position[3]],
[bbox_src_position[0], bbox_src_position[3]]]
contour_cur_np = np.array(bbox_cnt).reshape(-1, 1, 2)
cv2.polylines(matrix_np, [contour_cur_np], 1, 0)
cv2.fillPoly(matrix_np, [contour_cur_np], 0)
cur_area = (bbox_rec[2] - bbox_rec[0]) * (bbox_rec[3] - bbox_rec[1])
if cur_area > area_value:
result_list.append(bbox_src_position)
# 递归获取剩下的内接矩形
get_max_inner_rectangles(matrix_np, rectangle_bbox, area_value, result_list, cur_area)
return result_list
x, y, w, h = cv2.boundingRect(cnt_final.reshape(-1,1,2))
cnt_bbox = [x, y, x + w, y + h]
res_list = get_max_inner_rectangles(img, cnt_bbox, 100, [])
res_list = sorted(res_list, key=lambda _: (_[2] -_[0]) *(_[3] -_[1]), reverse=True)
res = res_list[0]
示例代码里面的轮廓使用该方法找到的最大内接矩形结果如图
(玫红色的矩形即为该方法找到的最大内接矩形):

5.总结
上述两种方法其实第二种的思想更加巧妙,第一种就是利用图像的思想主要是硬逻辑去找的,但是在某些特殊场景下可以根据需求去沿着x方向或者是y方向去找,两种方法的缺陷都是不能找到倾斜的最大内接矩形,单纯记录一下自己遇到的问题,有想法的可以交流哦。