自动驾驶开源数据集年份汇总:
1、Kitti数据集
网址:http://www.cvlibs.net/datasets/kitti/raw_data.php
论文地址:http://www.cvlibs.net/publications/Geiger2013IJRR.pdf
论文名称:Vision meets Robotics: The KITTIDataset
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。整个数据集由389对立体图像和光流图,39.2 km视觉测距序列以及超过200k 3D标注物体的图像组成,以10Hz的频率采样及同步。总体上看,原始数据集被分类为’Road’, ’City’, ’Residential’, ’Campus’ 和’Person’。对于3D物体检测,label细分为car, van, truck, pedestrian, pedestrian(sitting), cyclist, tram以及misc组成。
同时该数据提供了算法打榜功能,网站汇集了大量相关的论文算法,以及开源代码,是研究者的必看神器。

2、SemanticKITTI数据集
网址:http://semantic-kitti.org/dataset.html#download
论文地址:https://arxiv.org/abs/1904.01416
论文名称:SemanticKITTI:A Dataset for Semantic Scene Understanding of LiDAR Sequences
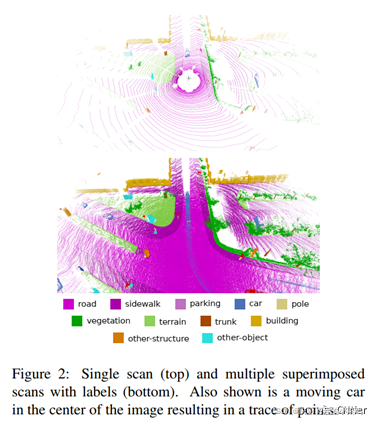
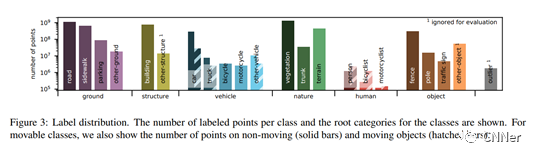
该数据集是基于Kitti的一个补充,主要提供了一个点云序列的点标注数据集,它具有前所未有的类数和每次扫描的未知详细程度。数据集包含了28个标注类别,包括汽车、卡车、摩托车、行人和骑自行车的人等。这样可以对场景中的动态对象进行推理。
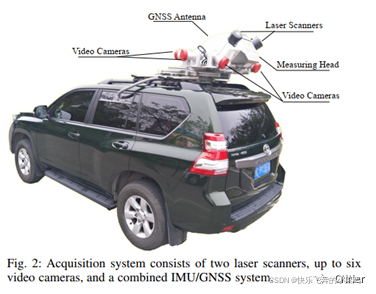
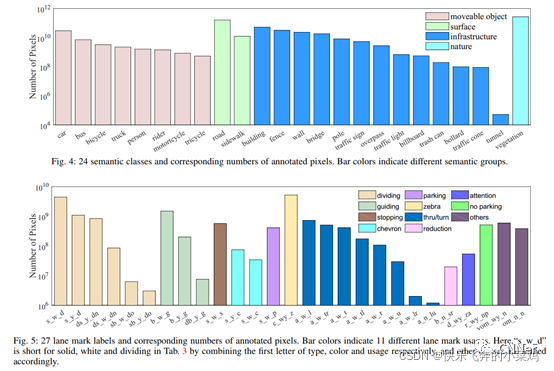
3、奥迪开源自动驾驶数据集(2020)
网址:http://www.a2d2.audi
论文地址:https://arxiv.org/abs/2004.06320
论文名称:A2D2: Audi Autonomous Driving Dataset
该数据主要来自德国街道,包含RGB图像,也包括对应的3D点云数据,记录的数据是时间同步的。目标3D包围框,语义分割,实例分割以及从汽车总线提取的数据。标注的非序列数据,41227帧,都含有语义分割标注和点云标签。其中含有前置摄像头视野内目标3D包围框标注12497帧。另外,该库还包括 392,556 连续帧的无标注的传感器数据。
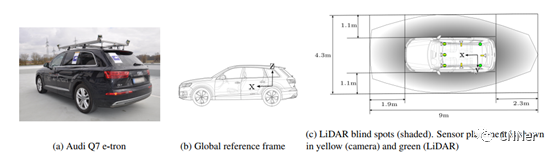

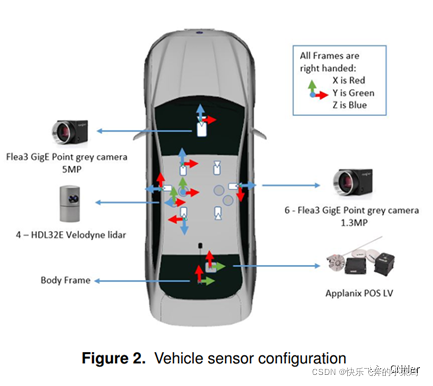
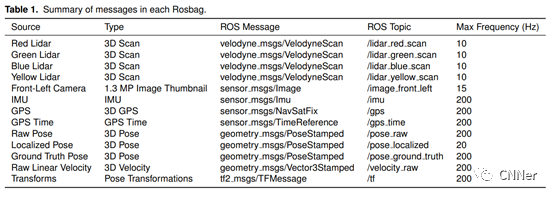
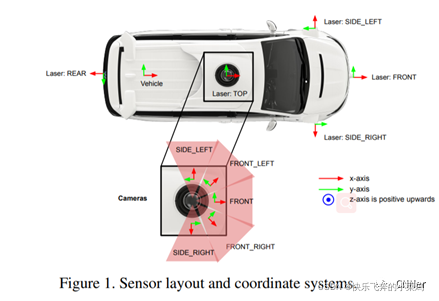
4、福特Multi-AV 数据集(2020)
网址:https://avdata.ford.com/
论文地址:https://arxiv.org/abs/2003.07969
论文名称:Ford Multi-AV Seasonal Dataset
数据量大且丰富,据说有1.8TB。但是数据类型很丰富,并且该数据集是使用ROS采集,提供了ROS Topic, 给大家应用带来了很好的方便性;涵盖场景丰富,包含了不同季节以及不同场景的数据;同时还开源了3D Map。总体来说作为新开源的数据库,诚意满满。数据刚刚开源。
5、waymo 开源自动驾驶数据集(google 自动驾驶部门)
网址:https://waymo.com/open
论文地址:https://arxiv.org/abs/1912.04838v5
论文名称:Scalability in Perception for Autonomous Driving: Waymo Open Dataset
Waymo刚开始是Google于2009年开启的一项自动驾驶汽车计划,之后于2016年12月才由Google独立出来,成为Alphabet公司旗下的子公司,Waymo是自动驾驶领域当之无愧的明星公司。waymo的硬件都是自研的,其在不同天气以及看的远近上有很大的借鉴意义,最近又更新了一下数据集,还颁布了悬赏令,为大家学习提供了良好的平台。
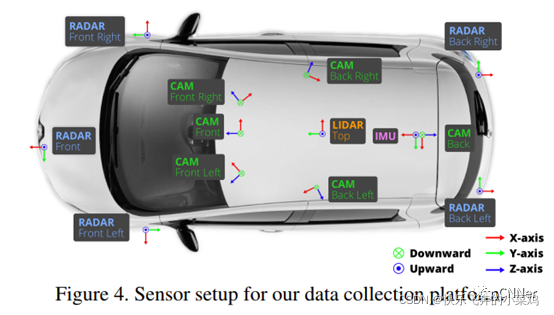
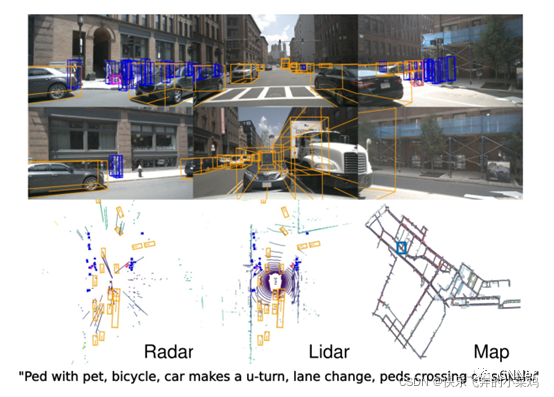
6、Nuscenes自动驾驶数据集
网址:https://www.nuscenes.org/
论文网址:https://arxiv.org/abs/1903.11027
论文名称:nuScenes: Amultimodal dataset for autonomous driving
7、Apollo 开源自动驾驶数据集(baidu)
网址:http://apolloscape.auto/
论文地址:https://arxiv.org/pdf/1803.06184.pdf
论文名称:Theapolloscape open dataset for autonomous driving and its application
2018年3月,百度大规模自动驾驶数据集ApolloScape应需开放,致力于为全世界自动驾驶技术研究者提供更为实用的数据资源及评估标准。ApolloScape已经开放了14.7万帧的像素级语义标注图像,包括感知分类和路网数据等数十万帧逐像素语义分割标注的高分辨率图像数据,以及与其对应的逐像素语义标注,覆盖了来自三个城市的三个站点周围10KM的地域。主要包含三部分:仿真数据集、演示数据集、标注数据集:
(1)仿真数据集,包括自动驾驶虚拟场景和实际道路真实场景;
(2)演示数据集,包括车载系统演示数据,标定演示数据,端到端演示数据,自定位模块演示数据;
(3)标注数据集,包括6部分数据集:激光点云障碍物检测分类,红绿灯检测,Road Hackers,基于图像的障碍物检测分类,障碍物轨迹预测,场景解析;
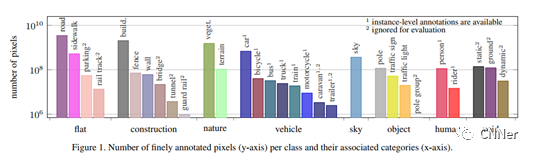
8、Cityscapes 数据集
网址:https://www.cityscapes-dataset.com/
论文地址:https://arxiv.org/abs/1604.01685
论文名称:TheCityscapes Dataset for Semantic Urban Scene Understanding
该大型数据集包含来自50个不同城市的街道场景中记录的多种立体视频序列,除了20000个弱注释帧以外,还包含5000帧高质量像素级注释。
9、Lyft 数据集
网址:https://level5.lyft.com/
论文地址:https://level5.lyft.com/dataset/
论文名称:Lyft Level 5 AV Dataset 2019
除了超过55,000个人工标记的3D注释交通代理帧外,该数据集还包含来自七个摄像头和多达三个激光雷达传感器的比特流,以及一个可驱动的表面地图和一个包含超过4,000个车道段的基础HD空间语义地图,197人行横道,60个停车标志,54个停车区,8个减速带和11个减速带。Lyft称,demo是从一个有限的地理区域的福特Fusion自动驾驶汽车车队收集的。他们每个人都配备了一个40光束的屋顶激光雷达和40光束保险杠激光雷达,宽视场相机,以及一个可以检测交通灯的长焦距摄像头。

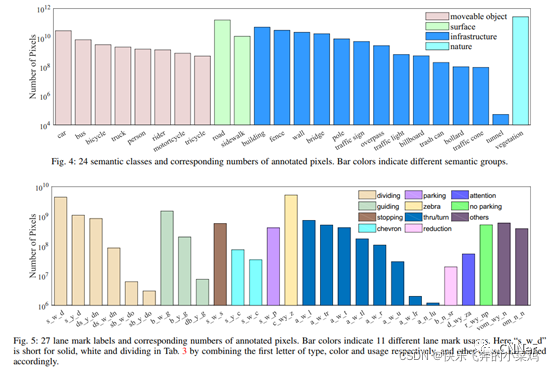
10、BDD100K数据集(伯克利DeepDrive联盟)
网址:https://bdd-data.berkeley.edu/
论文地址:https://arxiv.org/abs/1805.04687
论文名称:BDD100K: A Diverse Driving Dataset for Heterogeneous MultitaskLearning
伯克利大学AI实验室(BAIR)发布了目前最大规模、内容最具多样性的公开驾驶数据集BDD100K,同时设计了一个图片标注系统(Labeling System 的介绍见论文)。BDD100K 数据集包含10万段高清视频,每个视频约40秒,720p,30 fps 。每个视频的第10秒对关键帧进行采样,得到10万张图片(图片尺寸:1280 * 720 ),并进行标注。
转载于:https://cloud.tencent.com/developer/article/1648081