AUTOSAR CP
autosar classic platform,定义了软件架构的3个抽象级别:
- Application
- RTE: runtime environment
- BSW: basic software
- Services
- system
- memory
- communication
- …
- ECU ( electronic control unit) abstraction
- Microcontroller abstraction
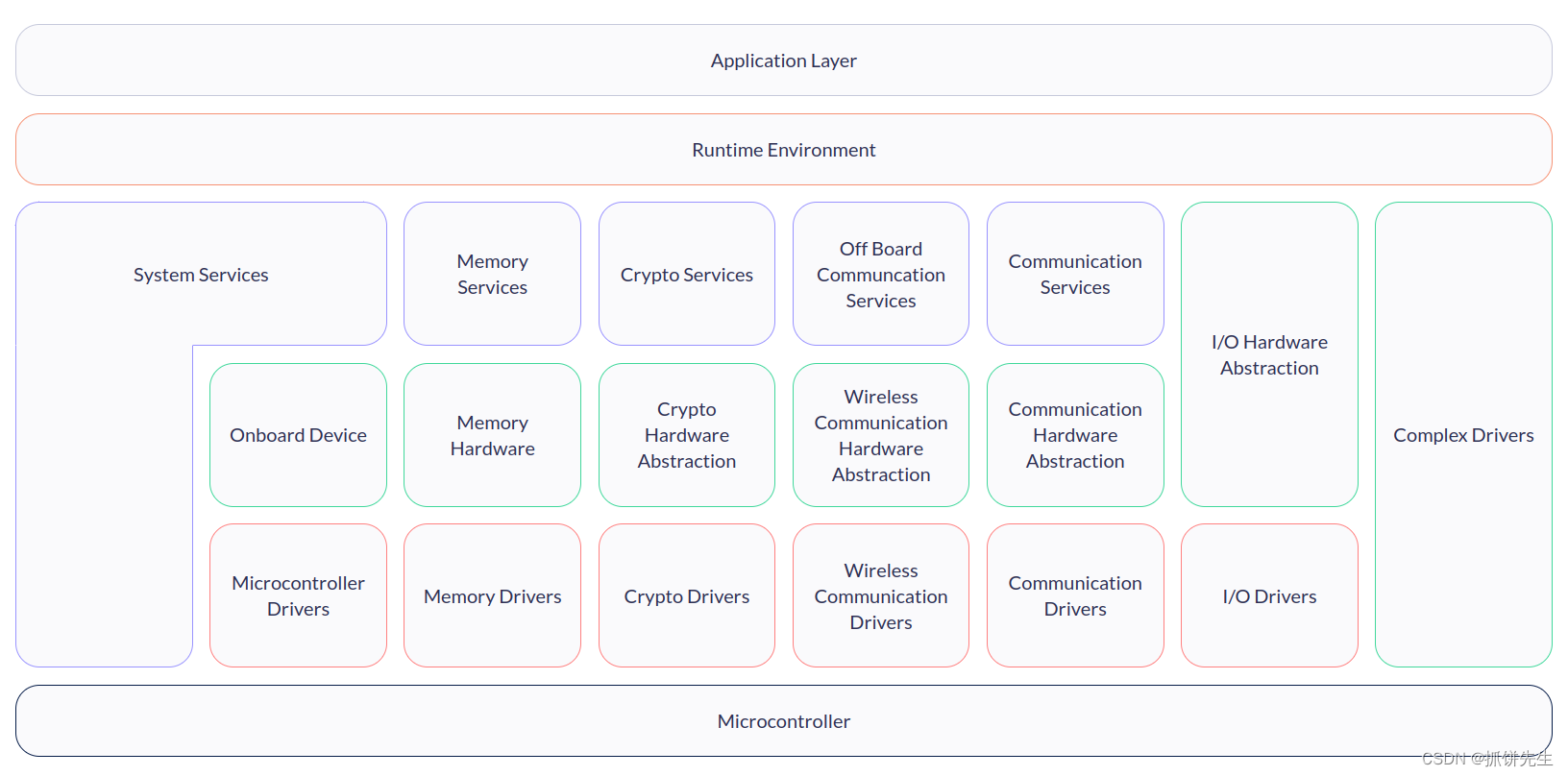
- Services
AUTOSAR AP
autosar adaptive platform,实现了RAR(Autosar Runtime for Adaptive Application)。
包括2种类型的接口:services和APIs。
平台由functional clusters组成,分组为services和Adaptive AUTOSAR Basis。
functional clusters:
- 描述ap的功能。
- 定义clustering的需求。
- 从应用和网络角度描述平台的行为。
- 不包括软件的架构设计
每个(虚拟)主机上,至少有一个Functional cluster实例,各个service可以分布在整个车载网络上。
对比Autosar cp,Autosar ap的RTE在运行时连接各个service和client。

CP vs. AP
CP架构面向单机架构,AP架构采用SOA(service oriented architecture)理念,扩展为可适用于分布式系统。
当前的车机系统,一套硬件(CPU)多个虚拟机已经很普及,未来多套硬件(多个CPU)的系统也会普及。
当前版本
AUTOSAR最新版本是R22-11,cp和ap都是这个版本。
2005年发布的第一版AUTOSAR,开始不区分CP和AP,早期一个版本可以持续更新多年。
2017年引入AP,头2年每年更新2个版本。
从2019年开始,CP和AP每年更新一版。
| 年份 | CP | AP |
|---|---|---|
| 2005 | R1 | - |
| 2006 | R2 | - |
| 2010-2014 | R3 | |
| 2013-2018 | R4 | |
| 2017 | R17-03/ R17-10 | |
| 2018 | R18-03/ R18-10 | |
| 2019 | R19-11 | R19-11 |
| 2020 | R20-11 | R20-11 |
| 2021 | R21-11 | R21-11 |
| 2022 | R22-11 | R22-11 |