SSAO By Computer Shader(三)
开启一个专题,SSAO By Computer Shader。使用Computer Shader实现SSAO效果。第一篇Computer Shader 入门 。第二篇SSAO理论知识。第三篇SSAO By Computer Shader,使用Computer Shader实现SSAO效果。
文章目录
前言
开启一个专题,SSAO By Computer Shader。使用Computer Shader实现SSAO效果。第三篇SSAO By Computer Shader 。我们已经大致了解Computer Shader 的实际用法以及SSAO效果的实现原理,我们将两者结合一下。
一、准备工作---------代码创建

创建一个控制Computer Shader的脚本,以及两个Computer文件分别用于生成AO图以及模糊处理,最后一个Shader文件用于实际渲染屏幕。
二、实现流程
1.Cs编写----------CommandBuffer设置渲染顺序
首先我们需要修改Computer Shader 执行的顺序,我们希望他在所有对象渲染后再执行,但是我们不希望他受到屏幕后处理的影响,这里我们用到CommandBuffer 类。一个功能及其强大的模块类。命令缓冲列表,可以执行的图形命令。
我们将Compuetr Shader的控制权交给CommandBuffer。首先注册CommandBuffer的渲染顺序。我们在ImageEffect之前激活CommandBuffer,
ImageEffect 就是我们的屏幕效果流程。
代码如下(示例):
void UnregisterCommandBuffers()
{
_camera.RemoveCommandBuffer(CameraEvent.BeforeImageEffects, _renderCommand);
}
void RegisterCommandBuffers()
{
_camera.AddCommandBuffer(CameraEvent.BeforeImageEffects, _renderCommand);
}
2.Cs编写---------参数准备
在LateUpdate()函数中我们触发PushDownsampleCommands(_renderCommand),并将我们的CommandBuffer作为参数传入。
在PushDownsampleCommands函数中,我们主要做这几件事情。
首先第一步参数准备
我们需要生成随机点。我们调用GenSampleKernal()函数获取随机点。
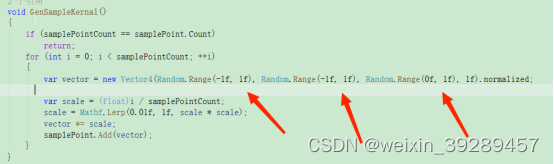
我们将循环n个随机点,随机点的生成范围x,y轴(-1,1),z轴(0-1)
其次我们要对比深度信息,我们需要Computer Shader 中采样到深度图以及法线信息。怎么传进去是一个问题。
为此我们需要申请一张RT存放深度,法线信息,再传入Computer Shader。我们将设置渲染目标为我们申请的RT,_depthCopy。调用DrawProcedural()函数绘制几何体。并用我们bitMat的Pass1来执行渲染。
bitMat中Pass1很简单,单纯渲染法线深度图。
Pass
{
CGPROGRAM
#pragma vertex vert_procedural
#pragma fragment frag
sampler2D_float _CameraDepthNormalsTexture;
float4 frag(v2f_img i) : SV_Target
{
return tex2D(_CameraDepthNormalsTexture, i.uv);
}
ENDCG
}
得到这样效果。
这样我们的深度,法线信息就存入到_depthCopy 的RT中。
进入第二步参数传入
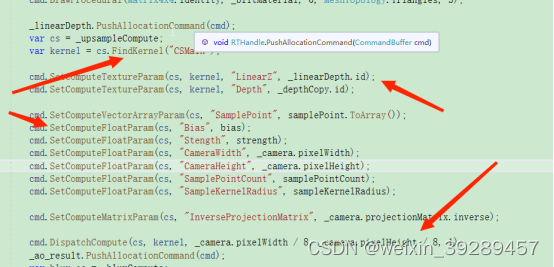
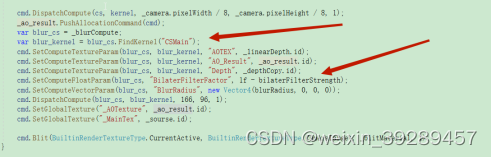
我们获取Computer Shader入口索引,CommandBuffer同样有提供Commputer Shader交互的接口。我们将深度法线图_depthCopy 传入,将_linearDepth 作为我们Computer Shader的输入输出,我们将对其写入数据。以及其他常规参数包括随机点集合,半圆半径的等参数。
最后我们激活 Computer Shader ,threadGroupsX,threadGroupsY,threadGroupsZ。我们线程组分配分别是屏幕分辨率/ 8 以及threadGroupsZ 1,简化维度。
以下是CS的完整代码
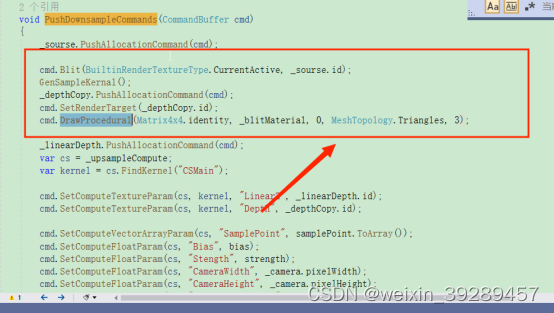
void PushDownsampleCommands(CommandBuffer cmd)
{
_sourse.PushAllocationCommand(cmd);
cmd.Blit(BuiltinRenderTextureType.CurrentActive, _sourse.id);
GenSampleKernal();
_depthCopy.PushAllocationCommand(cmd);
cmd.SetRenderTarget(_depthCopy.id);
cmd.DrawProcedural(Matrix4x4.identity, _blitMaterial, 0, MeshTopology.Triangles, 3);
_linearDepth.PushAllocationCommand(cmd);
var cs = _upsampleCompute;
var kernel = cs.FindKernel("CSMain");
cmd.SetComputeTextureParam(cs, kernel, "LinearZ", _linearDepth.id);
cmd.SetComputeTextureParam(cs, kernel, "Depth", _depthCopy.id);
cmd.SetComputeVectorArrayParam(cs, "SamplePoint", samplePoint.ToArray());
cmd.SetComputeFloatParam(cs, "Bias", bias);
cmd.SetComputeFloatParam(cs, "Stength", strength);
cmd.SetComputeFloatParam(cs, "CameraWidth", _camera.pixelWidth);
cmd.SetComputeFloatParam(cs, "CameraHeight", _camera.pixelHeight);
cmd.SetComputeFloatParam(cs, "SamplePointCount", samplePointCount);
cmd.SetComputeFloatParam(cs, "SampleKernelRadius", sampleKernelRadius);
cmd.SetComputeMatrixParam(cs, "InverseProjectionMatrix", _camera.projectionMatrix.inverse);
cmd.DispatchCompute(cs, kernel, 166, 96, 1);
_ao_result.PushAllocationCommand(cmd);
var blur_cs = _blurCompute;
var blur_kernel = blur_cs.FindKernel("CSMain");
cmd.SetComputeTextureParam(blur_cs, blur_kernel, "AOTEX", _linearDepth.id);
cmd.SetComputeTextureParam(blur_cs, blur_kernel, "AO_Result", _ao_result.id);
cmd.SetComputeTextureParam(blur_cs, blur_kernel, "Depth", _depthCopy.id);
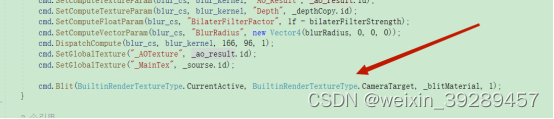
cmd.SetComputeFloatParam(blur_cs, "BilaterFilterFactor", 1f - bilaterFilterStrength);
cmd.SetComputeVectorParam(blur_cs, "BlurRadius", new Vector4(blurRadius, 0, 0, 0));
cmd.DispatchCompute(blur_cs, blur_kernel, 166, 96, 1);
cmd.SetGlobalTexture("_AOTexture", _ao_result.id);
cmd.SetGlobalTexture("_MainTex", _sourse.id);
cmd.Blit(BuiltinRenderTextureType.CurrentActive, BuiltinRenderTextureType.CameraTarget, _blitMaterial, 1);
}
3.Computer Shader编写----------AO计算
我们来看看这个Computer Shader实现了什么逻辑
// Each #kernel tells which function to compile; you can have many kernels
#pragma kernel CSMain
#include "UnityCG.cginc"
#include "noiseSimplex.cginc"
// Create a RenderTexture with enableRandomWrite flag and set it
// with cs.SetTexture
RWTexture2D<float4> LinearZ;
#define MAX_SAMPLE_POINT_COUNT 64
CBUFFER_START(CBO)
float Bias;
float Stength;
float CameraWidth;
float CameraHeight;
float SamplePointCount;
float SampleKernelRadius;
float4x4 InverseProjectionMatrix;
CBUFFER_END
float4 SamplePoint[MAX_SAMPLE_POINT_COUNT];
Texture2D<float4> Depth;
同常规Shader一样,我们需要定义参数,分别是我们在cs那边传入的参数。LineZ 对应cs的_linearDepth,我们将其标记为可读可写,他将作为我们的返回值存储我们的AO值。
来看看我们的核心计算逻辑。
我们先看看一下上部分逻辑。差不多分为三块。
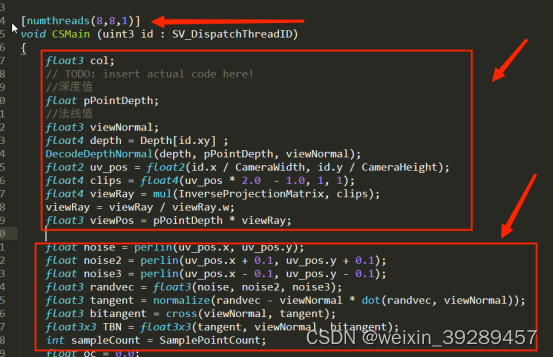
第一线程分配
首先我们要分配线程数numthreads(8,8,1)我们填的是8,8,1基本就是默认值。SV_DispatchThreadID (Int3)当前线程在所有线程组中所有线程里的ID。
第二部获取像素坐标对应视空间上的点。
首先这里的像素坐标就等于我们的id了,我们需要得到当前像素坐标的深度以及法线信息,我们可以直接采样传入_depthCopy得到。我们需要将当前像素坐标转化为视空间下的点,将其转到裁剪空间下再经过透视矩阵的逆矩阵变化到视空间下。乘上深度值得到像素坐标对应视空间上的点。
第三步,创建半圆空间转换矩阵TBN。
我们创建随机向量,减去 随机向量与法线点积乘上法线向量的结果,得到切线向量。通过叉积得到第三个向量组成我们的TBN矩阵。
我们来看下部分逻辑
同样分为三个部分,
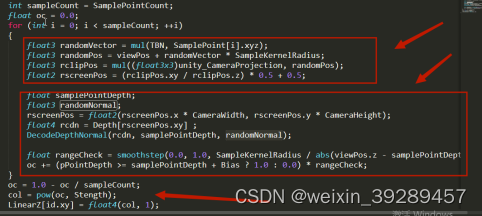
第一部分生成采样点。
我们遍历随机点转换到半圆空间中,加上半圆空间原点生成半圆空间向量。再通过裁剪矩阵,归一化转换到UV空间生成我们的深度采样点。
第二步,深度比较
将采样点采样深度图得到采样深度,与原像素点深度做比较,大于返回1,小于返回0。再乘上一个范围权重,距离越近ao效果越明显。经过1-取反后强化深度效果写入我们的RT,LinearZ。
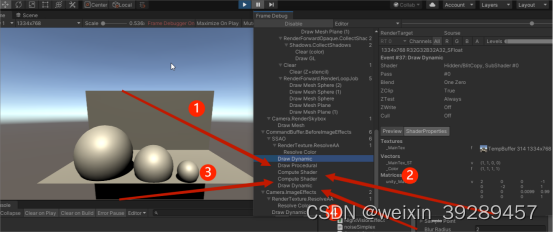
来看看frame debug的效果
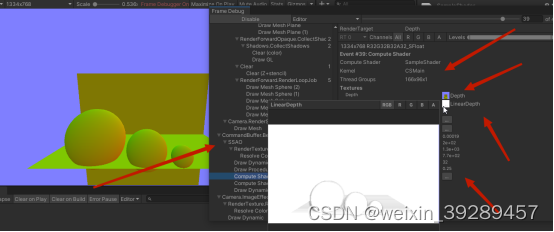
我们我们的渲染流程发生在ImageEffect之前,右边分别是我们的Kernael名字,线程组分配,法线深度图,ao图以及其他参数。以上就是Computer Shader的逻辑以及实现效果了。
具体代码如下
// Each #kernel tells which function to compile; you can have many kernels
#pragma kernel CSMain
#include "UnityCG.cginc"
#include "noiseSimplex.cginc"
// Create a RenderTexture with enableRandomWrite flag and set it
// with cs.SetTexture
RWTexture2D<float4> LinearZ;
#define MAX_SAMPLE_POINT_COUNT 64
CBUFFER_START(CBO)
float Bias;
float Stength;
float CameraWidth;
float CameraHeight;
float SamplePointCount;
float SampleKernelRadius;
float4x4 InverseProjectionMatrix;
CBUFFER_END
float4 SamplePoint[MAX_SAMPLE_POINT_COUNT];
Texture2D<float4> Depth;
[numthreads(8,8,1)]
void CSMain (uint3 id : SV_DispatchThreadID)
{
float3 col;
// TODO: insert actual code here!
//深度值
float pPointDepth;
//法线值
float3 viewNormal;
float4 depth = Depth[id.xy] ;
DecodeDepthNormal(depth, pPointDepth, viewNormal);
float2 uv_pos = float2(id.x / CameraWidth, id.y / CameraHeight);
float4 clips = float4(uv_pos * 2.0 - 1.0, 1, 1);
float4 viewRay = mul(InverseProjectionMatrix, clips);
viewRay = viewRay / viewRay.w;
float3 viewPos = pPointDepth * viewRay;
float noise = perlin(uv_pos.x, uv_pos.y);
float noise2 = perlin(uv_pos.x + 0.1, uv_pos.y + 0.1);
float noise3 = perlin(uv_pos.x - 0.1, uv_pos.y - 0.1);
float3 randvec = float3(noise, noise2, noise3);
float3 tangent = normalize(randvec - viewNormal * dot(randvec, viewNormal));
float3 bitangent = cross(viewNormal, tangent);
float3x3 TBN = float3x3(tangent, viewNormal, bitangent);
int sampleCount = SamplePointCount;
float oc = 0.0;
for (int i = 0; i < sampleCount; ++i)
{
float3 randomVector = mul(TBN, SamplePoint[i].xyz);
float3 randomPos = viewPos + randomVector * SampleKernelRadius;
float3 rclipPos = mul((float3x3)unity_CameraProjection, randomPos);
float2 rscreenPos = (rclipPos.xy / rclipPos.z) * 0.5 + 0.5;
float samplePointDepth;
float3 randomNormal;
rscreenPos = float2(rscreenPos.x * CameraWidth, rscreenPos.y * CameraHeight);
float4 rcdn = Depth[rscreenPos.xy] ;
DecodeDepthNormal(rcdn, samplePointDepth, randomNormal);
float rangeCheck = smoothstep(0.0, 1.0, SampleKernelRadius / abs(viewPos.z - samplePointDepth));
oc += (pPointDepth >= samplePointDepth + Bias ? 1.0 : 0.0) * rangeCheck;
}
oc = 1.0 - oc / sampleCount;
col = pow(oc, Stength);
LinearZ[id.xy] = float4(col, 1);
}
4.Computer Shader编写----------AO模糊
进入下一个环节模糊处理
跟前面一样我们同样获取模糊的computer Shader的入口索引,以及参数传入。最后设置全局贴图,将AO图传入shader
模糊中,我们直接偏移多次UV坐标,多次采样然后取均值返回。
最后就是我们的屏幕渲染了。
以下是Blur Computer Shader的具体代码
// Each #kernel tells which function to compile; you can have many kernels
#pragma kernel CSMain
#include "UnityCG.cginc"
RWTexture2D<float4> AO_Result;
#define MAX_SAMPLE_POINT_COUNT 64
CBUFFER_START(CBO)
Texture2D<float4> AOTEX;
Texture2D<float4> Depth;
float BilaterFilterFactor;
float4 BlurRadius;
CBUFFER_END
float3 GetNormal(float2 uv)
{
//获得法线贴图
float4 cdn = Depth[uv] ;
return DecodeViewNormalStereo(cdn);
}
half CompareNormal(float3 normal1, float3 normal2)
{
return smoothstep(BilaterFilterFactor, 1.0, dot(normal1, normal2));
}
[numthreads(8,8,1)]
void CSMain (uint3 id : SV_DispatchThreadID)
{
float2 delta = BlurRadius.xy;
float2 uv = id.xy;
float2 uv0a = id.xy - delta;
float2 uv0b = id.xy + delta;
float2 uv1a = id.xy - 2.0 * delta;
float2 uv1b = id.xy + 2.0 * delta;
float2 uv2a = id.xy - 3.0 * delta;
float2 uv2b = id.xy + 3.0 * delta;
float3 normal = GetNormal(uv);
float3 normal0a = GetNormal(uv0a);
float3 normal0b = GetNormal(uv0b);
float3 normal1a = GetNormal(uv1a);
float3 normal1b = GetNormal(uv1b);
float3 normal2a = GetNormal(uv2a);
float3 normal2b = GetNormal(uv2b);
fixed4 col = AOTEX[uv];
fixed4 col0a = AOTEX[uv0a];
fixed4 col0b = AOTEX[uv0b];
fixed4 col1a = AOTEX[uv1a];
fixed4 col1b = AOTEX[uv1b];
fixed4 col2a = AOTEX[uv2a];
fixed4 col2b = AOTEX[uv2b];
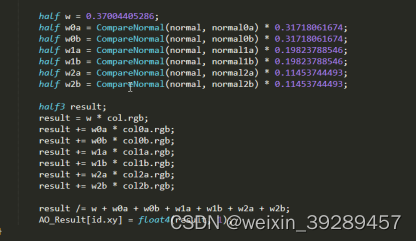
half w = 0.37004405286;
half w0a = CompareNormal(normal, normal0a) * 0.31718061674;
half w0b = CompareNormal(normal, normal0b) * 0.31718061674;
half w1a = CompareNormal(normal, normal1a) * 0.19823788546;
half w1b = CompareNormal(normal, normal1b) * 0.19823788546;
half w2a = CompareNormal(normal, normal2a) * 0.11453744493;
half w2b = CompareNormal(normal, normal2b) * 0.11453744493;
half3 result;
result = w * col.rgb;
result += w0a * col0a.rgb;
result += w0b * col0b.rgb;
result += w1a * col1a.rgb;
result += w1b * col1b.rgb;
result += w2a * col2a.rgb;
result += w2b * col2b.rgb;
result /= w + w0a + w0b + w1a + w1b + w2a + w2b;
AO_Result[id.xy] = float4(result, 1);
}
4.Shader编写----------融合
在我们的渲染Shader中,我们已经知道ao图以及原图数据了,直接采样融合即可
Pass
{
CGPROGRAM
#pragma vertex vert_img2
#pragma fragment frag
sampler2D _AOTexture;
sampler2D _MainTex;
float4 frag(v2f_img i) : SV_Target
{
fixed ao = tex2D(_AOTexture, i.uv).r;
fixed4 final_col = tex2D(_MainTex, i.uv);
return final_col * ao;
}
ENDCG
}
5.FrameDebugger分析
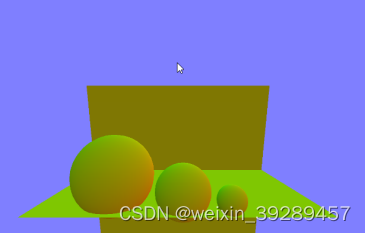
以下就是我们最终效果图
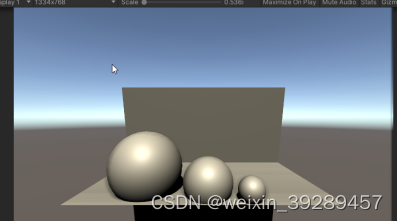
在帧事件中分别在这四个事件中完成
1.渲染深度图(shader完成)
2.计算ao值(computer shader完成)
3.模糊ao效果(computer shader完成)
4.融合(shader完成)
总结
以上就是SSAO By Computer 的全部内容,若有错误,欢迎纠正。