前沿与背景
每年在各类顶级会议期刊如CVPR(IEEE Conference on Computer Vision and Pattern Recognition,Ieee国际计算机视觉与模式识别会议)、ICCV(IEEE International Conference on Computer Vision,国际计算机视觉大会)、ECCV(European Conference on Computer Vision,欧洲计算机视觉国际会议)、SIGGRAPH(Special Interest Group for Computer GRAPHICS,计算机图形图像特别兴趣小组)都会出现很多篇视频降噪的论文,范围涉及到各类传统算法与深度学习算法。学术界拥有如此多的视频降噪算法,但拍照或者视频还是会出现很多噪点,这就是学术届优秀降噪成果难以有效在工业界落地的问题。
在视频应用广泛的互联网时代,清晰纯净的视频一定是各类应用场景的追求。在刷短视频或者观看直播,我们更愿意将目光长时间停留在图1.1,而图1.2是我们第一时间想划过去的视频画面。
降噪是图像/视频处理领域一直很基础很热门也很难的问题,也出现在不少产品应用中,但却很少在视频直播产品中见到降噪技术的应用。比如腾讯会议一款软件应用了视频降噪技术,带来的实际视频效果体验以及隐形的带宽流量节省都是显而易见。

图1.1

图1.2
视频噪声
● 噪声来源主要分为两种:
○ 图像获取中:图像传感器CCD 、CMOS采集图像时,受到传感器材料属性、工作环境、电子元器件、电路结构影响;
○ 图像信号传输中:传输介质和记录设备不完善;
● 噪声分类
○ 高斯噪声:概率密度函数服从高斯分布(正态分布);
○ 泊松噪声:光子离散噪声,实际数字图像中的噪声基本是高斯噪声和泊松噪声的混合噪声;
○ 椒盐噪声、加性噪声、乘性噪声、量化噪声等;
● 噪声场景
○ 夜晚场景:夜晚除了画面不清楚外,大量噪声也是引起视频体验的主要因素;
○ 平坦区域:摄像头的物理硬件的随机波动,在平坦区域会产生被视觉更容易察觉的噪声;
○ 高分辨率:分辨率越高,噪声波动对人眼视觉越明显;
○ 背光区域:由于前后景亮度差异过大,背光区域曝光不足,会让噪声看起来更明显;
视频降噪技术
● 滤波法
○ 空域法:mean filters、gaussian filters、medium filters、bilateral filters、NLM、NLB等;
○ 变换域法:维纳、离散傅立叶、离散小波、DCT等;
○ 混合时空变换法 :BM3D、meshflow、hqdn3d、卡尔曼等;
● 稀疏表达:k-SVD
● 聚类低秩:WNNM(weighted nuclear norm minization,加权核范数最小化)
● 统计模型:高斯混合模型
● 深度学习:FFDNet、CBDNet等;
视频降噪优势
● 视觉效果:大幅提升视频主观体验,增加视频观看舒适度。
● 编码压缩与带宽传输:提升视频编码RD性能、运动估计更准确更高效、熵编码速度更快、降低码率、降低编码复杂度。
常见降噪算法介绍
mean filters
典型的空域线性滤波算法,原理简单,即在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标像素为中心的周围8个像素,构成一个滤波模板,即包括目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
medium filters
典型的空域非线性滤波算法,原理简单,每一个目标像素值设置为该点某邻域窗口内的所有像素值的中值。
guassian filters
典型的空域线性平滑滤波算法,原理简单,每一个像素值,都由其本身和邻域内的其他像素值经过加权平均后得到。
bilateral filters
典型的空域非线性滤波算法,原理简单,即可以认为是高斯滤波的改进迭代版,同时考虑图像的空间近邻度和像素值相似度的一种折中算法。
NLB
“Non-Local Bayes” (NL-Bayes)非局部贝叶斯,利用图像的自相似结构进行去噪。
○ 原理
■ one-step
● 找到与给定图像块相似的图像块,并组成3D块
● 协方差滤波
○ 贝叶斯公式应用到3D块;
○ 重新定位3D块;
● 聚合
○ 聚合就是为了消除3D滤波产生的滤波块重叠,被获取的许多估计数需要为每个像素组合;
● Acceleration 加速
■ two-step
● grouping 组块
● Collaborative Filtering 协方差滤波
● Aggregation 聚合
○ 迭代版本
■ Non-local Bayesian Video Denoising 非局部贝叶斯视频去噪
■ https://github.com/pariasm/vnlb
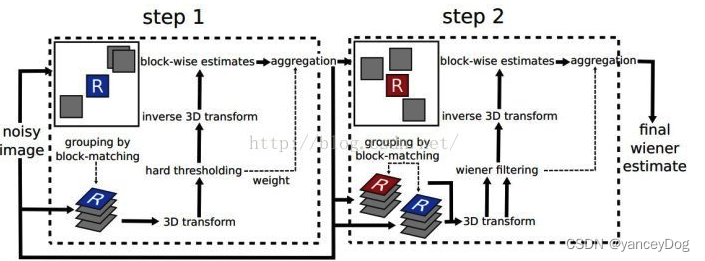
BM3D
代码:https://github.com/gfacciol/bm3d
典型的且效果较好的空域与变换域结合的去噪算法,原理相对较复杂,算法复杂度也相对较高,当然实际去噪效果也相对传统的去噪算法有明显的提升。
中心思想:充分利用自然图像中丰富的自相似结构来进行图像降噪;
step1:基础估计
■ 相似块分组Grouping
■ 协同滤波Collaborative Filtering
■ 聚合 Aggregation
step2:最终估计
■ 块匹配Grouping
■ 3D协同维纳滤波 Collaborative Filtering
■ 聚合加权滤波Aggregation
meshflow
meshflow来源于2017年中国电子科技大学一篇sci级别论文。steadyflow需要计算密集的光流(optical flow)并提取所有像素位置的像素配置来进行处理;与steadyflow相比,meshflow仅在稀疏规则的顶点配置网格上进行操作。
通过对论文中meshflow算法剖析,在相邻帧之间进行估计,这些帧用于在一个滑动时间窗口内对齐帧,整个方案可以分成特征跟踪、网格流估计、运动累积、一致性检查、像素融合;该算法具有模型轻量级、非参数化、空间变形体等内在特征,能够有效地实现多帧图像的去噪,具体算法思路如图2.1所示:
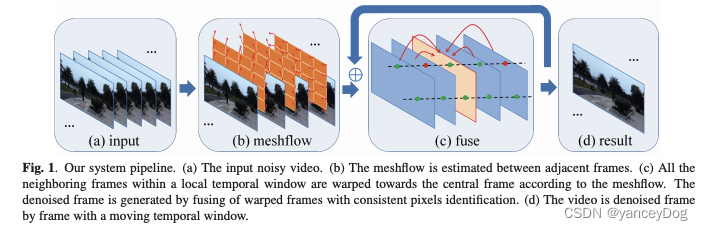
图2.1
论文介绍实验结果,1920x1080的分辨率单帧平均需要260 ms,具体来说,特征跟踪27ms、网格流估计21ms、运动累积38 ms、一致性检查25 ms、像素融合149ms。从论文实验结果对比分析,视频降噪效果大多数场景效果非常明显,但算法复杂度仍然相对较高,距离实时视频应用场景落地还有一段路程。
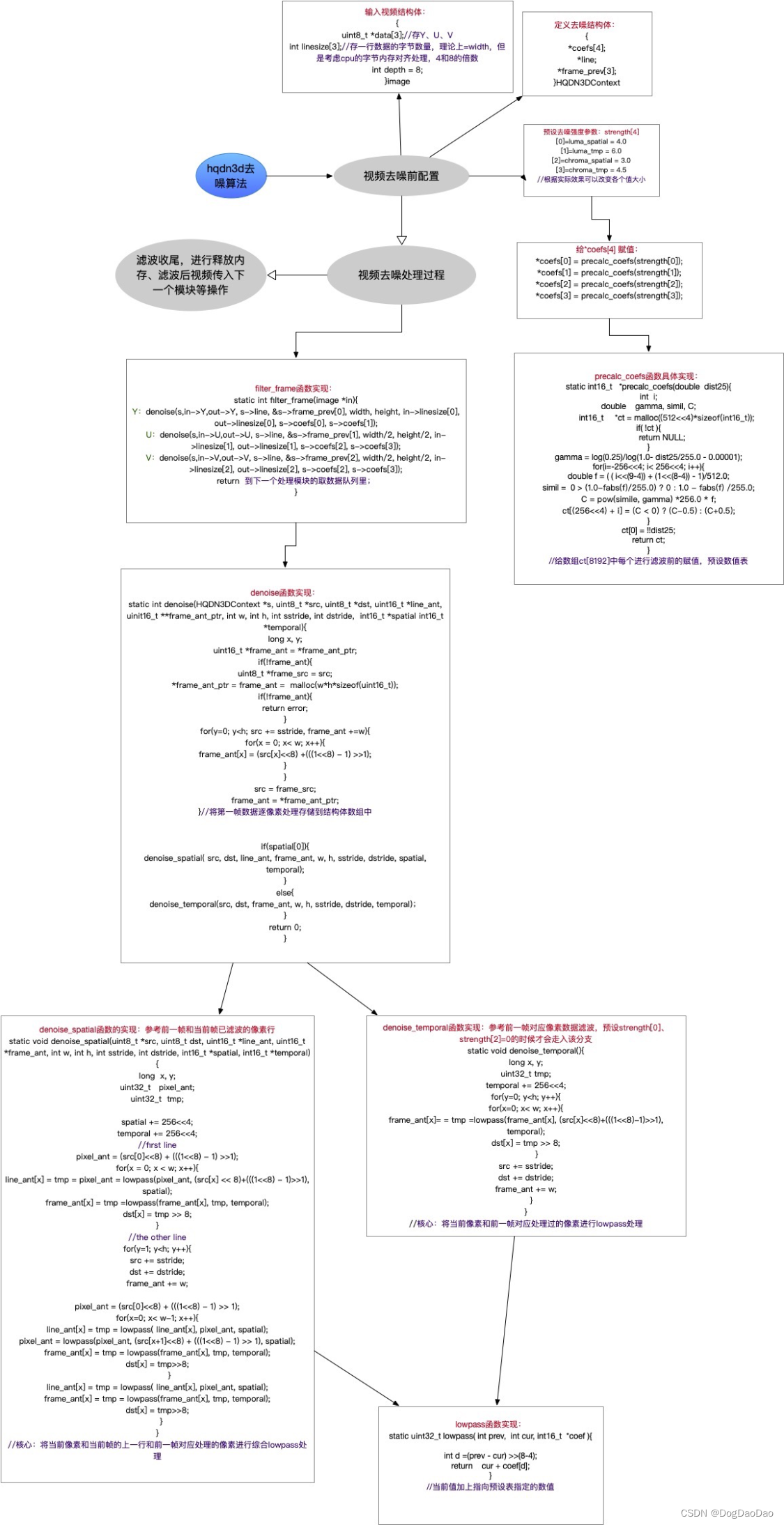
hqdn3d
简介
作为Avisynth一款视频处理插件,集成应用到Mplayer播放器中。hqdn3d是时域、空域混合滤波算法,不涉及变换域 ,算法原理容易理解,总结其原理,包含几点:
● 逐像素进行,不涉及频域变换,不涉及运动搜索,不涉及帧间对齐;
● 3D去噪,当前像素参考左邻、上邻、上帧同一位置的三个像素;
● 根据相邻像素的差,确定偏移量,将相邻像素颜色值“拉近”,即对像素做加减法;
● 较小的像素差异,拉近距离,若差异较大,降低偏置系数,达到保边效果;
● 通过外部设置滤波强度,调整峰值位置;

算法核心原理图
各类算法复杂度对比

参考
在线实验各类新算法网址:https://www.ipol.im/