目录
任务是编写一个钱币定位系统,其不仅能够检测出输入图像中各个钱币的边缘,同时,还能给出各个钱币的圆心坐标与半径。
一、实现原理
步骤1:使用Canny 算法提取图像边缘
① 使用高斯滤波器滤波;
② 计算图像的梯度图并获得梯度方向;
③ 对梯度图进行非极大化抑制;
④ 使用双阈值法获得最终的边缘图。
高斯滤波
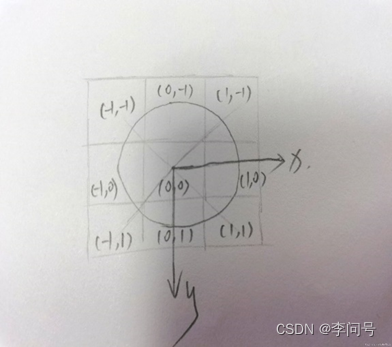
我们假设一个3*3的高斯卷积核模板
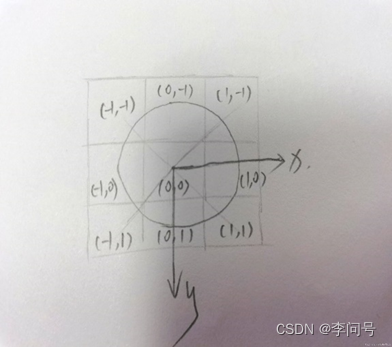
中心的小格子为(0,0),左上角的小格子为(-1,-1),以此类推。
将卷积核中每个小格子的坐标带入到高斯函数中,就可以得到每个小格子的权值。


卷积核的权值总和应该为1,因此需要进行归一化处理,
图像是以像素值来表示的。
在这个灰度图像,每个小格子中都有一个像素值,将卷积核模板覆盖到图像上,如图红色和黑色格子。将图像像素值与对应位置的卷积核的权值相乘,并求其总和,即为黑色格子进行高斯卷积之后所对应的像素值。
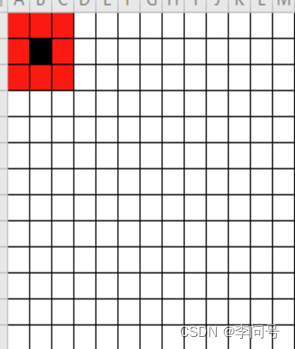
通过将这个卷积核模版平移,可计算整个图像中所有格子进行卷积后的值,这样就得到进行高斯卷积之后的图像。
高斯卷积会使得图像丢失最外围的像素。因此通常会在卷积之前,在图像的周围填充一些像素,来保证图像卷积后大小不变。
计算梯度
为什么要求偏导或者梯度?
图像的边缘是由于像素值的突变引起的,因此我们需要通过求梯度强度和方向来获取到突变发生的位置,检测到边缘特征点。
首先需要计算偏导
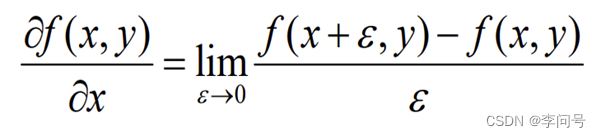
因为图像像素格最小单位是1,我们近似伊普西隆等于1,那么该点的导数等于它右边的点减去它自身,我们可以用卷积来实现这个过程。
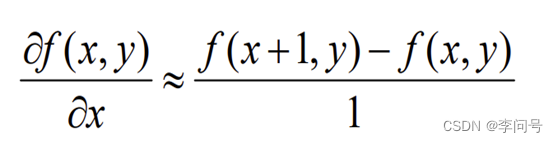

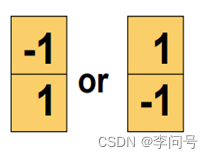
在求x偏导时,用这个卷积核与图像的像素值相乘,就得到了偏导后的图像值,对y求偏导同理
梯度表示了信号变化的大小和方向,梯度值越强,表明该点越有可能是边,梯度方向与边的方向垂直
非极大值抑制
我们通过上述过程提取到的边缘会很粗,我们想要得到的图像的边缘应该只有一个像素的粗细。因此我们要提取突变最大的点作为图像的边缘
非极大值抑制法 ,沿梯度方向,取一像素点,与该像素点前后各一像素点,进行比较,保留最大值,把其他的值舍弃
假设梯度方向是沿x轴方向的,我们需要比较点(-1,0)和点(0,0)两处的梯度强度,若点(0,0)的梯度强度大于(-1,0),则比较(0,0)和(1,0)的梯度强度,若(0,0)小于(1,0),则继续比较(1,0)和(2,0),若(0,0)大于(-1,0)且大于(1,0)则(0,0)最大,可保留,其余的均丢弃,即像素值设为0.
然而实际应用中,梯度方向和边垂直,但边并不都是水平或者垂直的,因此我们可以选取其所靠近的值,采用不同的权重来计算该点的梯度强度。
图像的点1和点2标反了
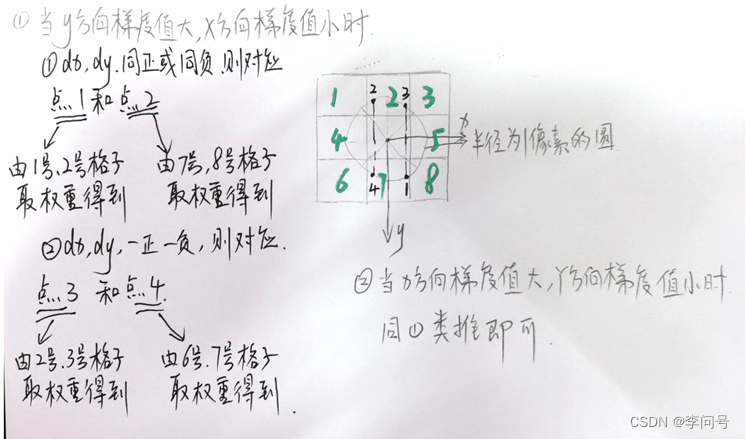
具体的实现是首先通过for循环遍历所有像素点,梯度值小于4的点直接舍弃,如果该梯度方向的正切的绝对值大于1,就说明离y轴近,y方向的梯度值大,记录其前后两个像素的梯度值;然后如果该点的梯度方向的正切大于0,说明位于一三象限,我们再记录两个对角像素的梯度值;将1号、2号格子去权重得到点1,7号和8号格子去权重得到点2,比较中心点和点1、点2的大小,保留最大值,把其他点舍弃。
步骤2:在边缘图上利用Hough变换计算圆心与半径
① 建立参数空间;
② 依据边缘点的梯度方向对参数空间进行投票;
③ 依据预设定的投票阈值筛选出初步结果;
④ 对已筛选出的结果进行非极大化抑制,得到精确的参数(圆心和半径)。
二、具体代码
代码1:直接调用opencv库
import cv2
import math
import numpy as np
Path = "picture_source/picture.jpg" #图像路径
Save_Path = "1/" #图像保存路径
Reduced_ratio = 2
#预处理
img_gray = cv2.imread(Path, cv2.IMREAD_GRAYSCALE)
img_RGB = cv2.imread(Path)
y, x = img_gray.shape[0:2]
img_gray = cv2.resize(img_gray, (int(x / Reduced_ratio), int(y / Reduced_ratio)))
img_RGB = cv2.resize(img_RGB, (int(x / Reduced_ratio), int(y / Reduced_ratio)))
#检测边缘
edges = cv2.Canny(img_gray, 100, 200)
cv2.imwrite(Save_Path + "canny_result.jpg", edges) #生成图像
#检测圆
circles=cv2.HoughCircles(edges, cv2.HOUGH_GRADIENT, 1, y/8, param1= 100,param2= 30,minRadius= 10, maxRadius= 100)
if circles is not None:
circles = np.uint16(np.around(circles))
for circle in circles[0, :]:
cv2.circle(img_RGB, (circle[0], circle[1]), circle[2], (132, 135, 239), 2)
cv2.imwrite(Save_Path + "hough_result.jpg", img_RGB)
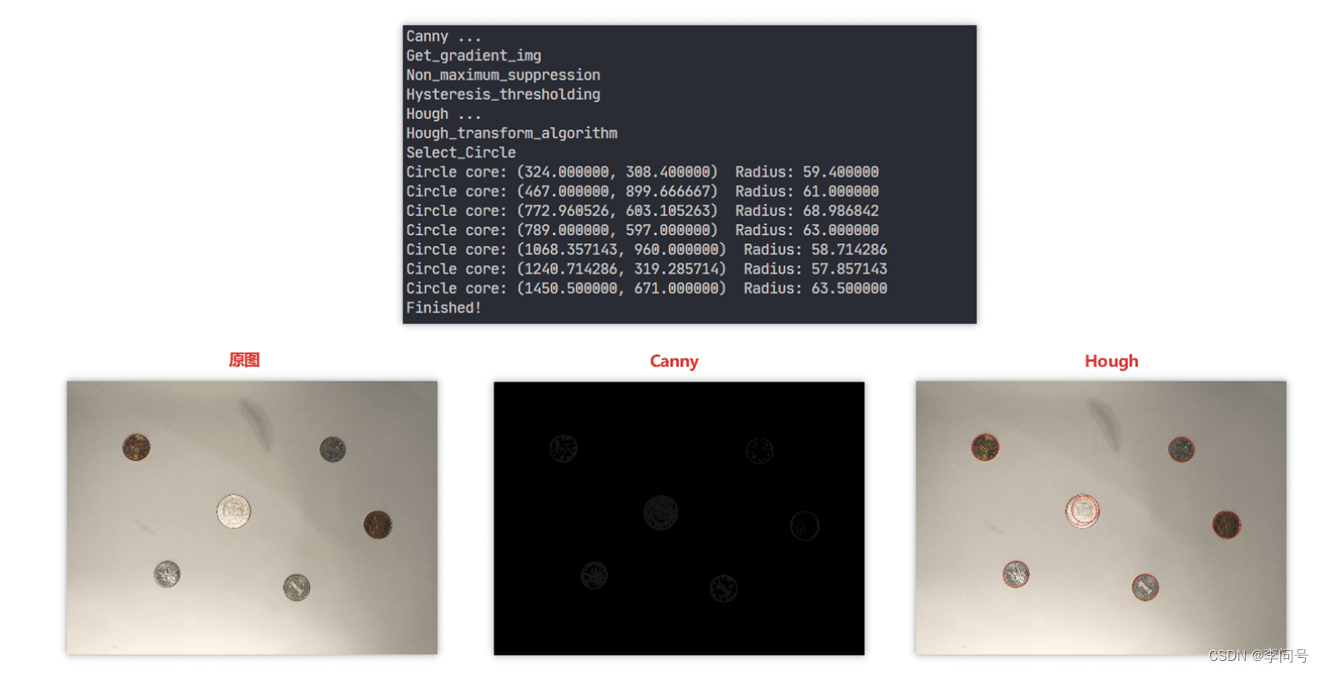
print('Finished!')
效果图:
代码2:自主实现代码
my_Canny.py
import cv2
import numpy as np
class Canny:
def __init__(self, Guassian_kernal_size, img, HT_high_threshold, HT_low_threshold):
'''
:param Guassian_kernal_size: 高斯滤波器尺寸
:param img: 输入的图片,在算法过程中改变
:param HT_high_threshold: 滞后阈值法中的高阈值
:param HT_low_threshold: 滞后阈值法中的低阈值
'''
self.Guassian_kernal_size = Guassian_kernal_size
self.img = img
self.y, self.x = img.shape[0:2]
self.angle = np.zeros([self.y, self.x]) #梯度方向矩阵
self.img_origin = None
self.x_kernal = np.array([[-1, 1]]) #x偏导卷积核
self.y_kernal = np.array([[-1], [1]]) #y偏导卷积核
self.HT_high_threshold = HT_high_threshold
self.HT_low_threshold = HT_low_threshold
def Get_gradient_img(self):
'''
计算梯度图和梯度方向矩阵。
:return: 生成的梯度图
'''
print ('Get_gradient_img')
#求x,y偏导矩阵
new_img_x = np.zeros([self.y, self.x], dtype=np.float)
new_img_y = np.zeros([self.y, self.x], dtype=np.float)
for i in range(0, self.x):
for j in range(0, self.y):
if j == 0:
new_img_y[j][i] = 1
else:
new_img_y[j][i] = np.sum(np.array([[self.img[j - 1][i]], [self.img[j][i]]]) * self.y_kernal)
if i == 0:
new_img_x[j][i] = 1
else:
new_img_x[j][i] = np.sum(np.array([self.img[j][i - 1], self.img[j][i]]) * self.x_kernal)
#求梯度矩阵
gradient_img, self.angle = cv2.cartToPolar(new_img_x, new_img_y) #直角坐标系转换成极坐标向
self.angle = np.tan(self.angle) #梯度方向的正切矩阵
self.img = gradient_img.astype(np.uint8)
return self.img
def Non_maximum_suppression (self):
'''
对生成的梯度图进行非极大化抑制,将tan值的大小与正负结合,确定离散中梯度的方向。
:return: 生成的非极大化抑制结果图
'''
print ('Non_maximum_suppression')
result = np.zeros([self.y, self.x])
for i in range(1, self.y - 1):
for j in range(1, self.x - 1):
if abs(self.img[i][j]) <= 4:
result[i][j] = 0
continue
elif abs(self.angle[i][j]) > 1: #大小决定x还是y方向的梯度值大
gradient2 = self.img[i - 1][j]
gradient4 = self.img[i + 1][j]
# g1 g2
# C
# g4 g3
if self.angle[i][j] > 0: #正负决定梯度方向是一三象限还是二四象限
gradient1 = self.img[i - 1][j - 1]
gradient3 = self.img[i + 1][j + 1]
# g2 g1
# C
# g3 g4
else:
gradient1 = self.img[i - 1][j + 1]
gradient3 = self.img[i + 1][j - 1]
else:
gradient2 = self.img[i][j - 1]
gradient4 = self.img[i][j + 1]
# g1
# g2 C g4
# g3
if self.angle[i][j] > 0:
gradient1 = self.img[i - 1][j - 1]
gradient3 = self.img[i + 1][j + 1]
# g3
# g2 C g4
# g1
else:
gradient3 = self.img[i - 1][j + 1]
gradient1 = self.img[i + 1][j - 1]
#该点梯度方向前后两个点的梯度值
temp1 = abs(self.angle[i][j]) * gradient1 + (1 - abs(self.angle[i][j])) * gradient2
temp2 = abs(self.angle[i][j]) * gradient3 + (1 - abs(self.angle[i][j])) * gradient4
if self.img[i][j] >= temp1 and self.img[i][j] >= temp2:
result[i][j] = self.img[i][j]
else:
result[i][j] = 0
self.img = result
return self.img
def Hysteresis_thresholding(self):
'''
对生成的非极大化抑制结果图进行滞后阈值法,用强边延伸弱边,这里的延伸方向为梯度的垂直方向,
将比低阈值大比高阈值小的点置为高阈值大小,方向在离散点上的确定与非极大化抑制相似。
:return: 滞后阈值法结果图
'''
print ('Hysteresis_thresholding')
for i in range(1, self.y - 1):
for j in range(1, self.x - 1):
if self.img[i][j] >= self.HT_high_threshold:
if abs(self.angle[i][j]) < 1: #y方向
if self.img_origin[i - 1][j] > self.HT_low_threshold:
self.img[i - 1][j] = self.HT_high_threshold
if self.img_origin[i + 1][j] > self.HT_low_threshold:
self.img[i + 1][j] = self.HT_high_threshold
# g1 g2
# C
# g4 g3
if self.angle[i][j] < 0: #二四象限
if self.img_origin[i - 1][j - 1] > self.HT_low_threshold:
self.img[i - 1][j - 1] = self.HT_high_threshold
if self.img_origin[i + 1][j + 1] > self.HT_low_threshold:
self.img[i + 1][j + 1] = self.HT_high_threshold
# g2 g1
# C
# g3 g4
else:
if self.img_origin[i - 1][j + 1] > self.HT_low_threshold:
self.img[i - 1][j + 1] = self.HT_high_threshold
if self.img_origin[i + 1][j - 1] > self.HT_low_threshold:
self.img[i + 1][j - 1] = self.HT_high_threshold
else:
if self.img_origin[i][j - 1] > self.HT_low_threshold:
self.img[i][j - 1] = self.HT_high_threshold
if self.img_origin[i][j + 1] > self.HT_low_threshold:
self.img[i][j + 1] = self.HT_high_threshold
# g1
# g2 C g4
# g3
if self.angle[i][j] < 0:
if self.img_origin[i - 1][j - 1] > self.HT_low_threshold:
self.img[i - 1][j - 1] = self.HT_high_threshold
if self.img_origin[i + 1][j + 1] > self.HT_low_threshold:
self.img[i + 1][j + 1] = self.HT_high_threshold
# g3
# g2 C g4
# g1
else:
if self.img_origin[i - 1][j + 1] > self.HT_low_threshold:
self.img[i + 1][j - 1] = self.HT_high_threshold
if self.img_origin[i + 1][j - 1] > self.HT_low_threshold:
self.img[i + 1][j - 1] = self.HT_high_threshold
return self.img
def canny_algorithm(self):
'''
按照顺序和步骤调用以上所有成员函数。
:return: Canny 算法的结果
'''
#高斯滤波器滤波
self.img = cv2.GaussianBlur(self.img, (self.Guassian_kernal_size, self.Guassian_kernal_size), 0)
self.Get_gradient_img()
self.img_origin = self.img.copy()
self.Non_maximum_suppression()
self.Hysteresis_thresholding()
return self.img
my_hough.py
import numpy as np
import math
class Hough_transform:
def __init__(self, img, angle, step=5, threshold=135):
'''
:param img: 输入的图像
:param angle: 输入的梯度方向矩阵
:param step: Hough 变换步长大小
:param threshold: 筛选单元的阈值
'''
self.img = img
self.angle = angle
self.y, self.x = img.shape[0:2]
self.radius = math.ceil(math.sqrt(self.y**2 + self.x**2))
self.step = step
#向上取整
self.vote_matrix = np.zeros([math.ceil(self.y / self.step), math.ceil(self.x / self.step), math.ceil(self.radius / self.step)])
self.threshold = threshold
self.circles = []
def Hough_transform_algorithm(self):
'''
按照 x,y,radius 建立三维空间,图片中边上的点沿梯度方向沿步长经过的单元进行投票。每个点投出来结果为一折线。
:return: 投票矩阵
'''
print ('Hough_transform_algorithm')
for i in range(1, self.y - 1):
for j in range(1, self.x - 1):
if self.img[i][j] > 0:
y = i
x = j
r = 0
while y < self.y and x < self.x and y >= 0 and x >= 0: #圆心在图像中
#向下取整
self.vote_matrix[math.floor(y / self.step)][math.floor(x / self.step)][math.floor(r / self.step)] += 1
y = y + self.step * self.angle[i][j]
x = x + self.step
r = r + math.sqrt((self.step * self.angle[i][j])**2 + self.step**2)
y = i - self.step * self.angle[i][j]
x = j - self.step
r = math.sqrt((self.step * self.angle[i][j])**2 + self.step**2)
while y < self.y and x < self.x and y >= 0 and x >= 0:
self.vote_matrix[math.floor(y / self.step)][math.floor(x / self.step)][math.floor(r / self.step)] += 1
y = y - self.step * self.angle[i][j]
x = x - self.step
r = r + math.sqrt((self.step * self.angle[i][j])**2 + self.step**2)
return self.vote_matrix
def Select_Circle(self):
'''
按照阈值从投票矩阵中筛选出合适的圆,并作非极大值抑制,这里的非极大值抑制我采
用的是邻近点结果取平均值的方法,而非单纯的取极大值。
:return: None
'''
print ('Select_Circle')
#筛选出候选圆列表
houxuanyuan = []
for i in range(0, math.ceil(self.y / self.step)):
for j in range(0, math.ceil(self.x / self.step)):
for r in range(0, math.ceil(self.radius / self.step)):
if self.vote_matrix[i][j][r] >= self.threshold:
y = i * self.step + self.step / 2
x = j * self.step + self.step / 2
r = r * self.step + self.step / 2
houxuanyuan.append((math.ceil(x), math.ceil(y), math.ceil(r)))
if len(houxuanyuan) == 0:
print("No Circle in this threshold.")
return
#非极大值抑制
x, y, r = houxuanyuan[0]
possible = []
middle = []
for circle in houxuanyuan:
#两点的误差不超过20像素,认为是同一圆心,将x,y,r求均值
if abs(x - circle[0]) <= 20 and abs(y - circle[1]) <= 20:
possible.append([circle[0], circle[1], circle[2]])
else:
#求一列的均值
result = np.array(possible).mean(axis=0)
middle.append((result[0], result[1], result[2]))
possible.clear()
x, y, r = circle
possible.append([x, y, r])
result = np.array(possible).mean(axis=0)
middle.append((result[0], result[1], result[2]))
def takeFirst(elem):
return elem[0]
middle.sort(key=takeFirst)
x, y, r = middle[0]
possible = []
for circle in middle:
if abs(x - circle[0]) <= 20 and abs(y - circle[1]) <= 20:
possible.append([circle[0], circle[1], circle[2]])
else:
result = np.array(possible).mean(axis=0)
print("Circle core: (%f, %f) Radius: %f" % (result[0], result[1], result[2]))
self.circles.append((result[0], result[1], result[2]))
possible.clear()
x, y, r = circle
possible.append([x, y, r])
result = np.array(possible).mean(axis=0)
print("Circle core: (%f, %f) Radius: %f" % (result[0], result[1], result[2]))
self.circles.append((result[0], result[1], result[2]))
def Calculate(self):
'''
按照算法顺序调用以上成员函数
:return: 圆形拟合结果图,圆的坐标及半径集合
'''
self.Hough_transform_algorithm()
self.Select_Circle()
return self.circles
main.py
import cv2
import math
from my_hough import Hough_transform
from my_canny import Canny
# np.set_printoptions(threshold=np.inf)
Path = "picture_source/picture.jpg" #图像路径
Save_Path = "picture_result/" #图像保存路径
Reduced_ratio = 2 #
Guassian_kernal_size = 3 #高斯核窗口大小(尺寸)
HT_high_threshold = 45 #高阈值(梯度)
HT_low_threshold = 25
Hough_transform_step = 6 #霍夫变换的步长
Hough_transform_threshold = 110 #霍夫变换的阈值投票数
if __name__ == '__main__':
img_gray = cv2.imread(Path, cv2.IMREAD_GRAYSCALE) #读入灰度图片
img_RGB = cv2.imread(Path)
y, x = img_gray.shape[0:2] #高度和宽度
img_gray = cv2.resize(img_gray, (int(x / Reduced_ratio), int(y / Reduced_ratio)))
#修改图片尺寸,方便计算
img_RGB = cv2.resize(img_RGB, (int(x / Reduced_ratio), int(y / Reduced_ratio)))
# canny takes about 40 seconds
print ('Canny ...')
canny = Canny(Guassian_kernal_size, img_gray, HT_high_threshold, HT_low_threshold)
canny.canny_algorithm()
cv2.imwrite(Save_Path + "canny_result.jpg", canny.img) #生成图像
# hough takes about 30 seconds
print ('Hough ...')
Hough = Hough_transform(canny.img, canny.angle, Hough_transform_step, Hough_transform_threshold)
circles = Hough.Calculate()
for circle in circles:
cv2.circle(img_RGB, (math.ceil(circle[0]), math.ceil(circle[1])), math.ceil(circle[2]), (132, 135, 239), 2)
cv2.imwrite(Save_Path + "hough_result.jpg", img_RGB)
print ('Finished!')
效果图