一,SG90舵机的基本参数

外形尺寸:23×12.2×27mm
输入电压:4.2v-6v
工作温度:0-55℃
舵机有三条线:
信号线(黄线)
红线(电源线VCC)
棕色(底线GND)(记得还要有公对母的杜邦线和精英板进行连接)
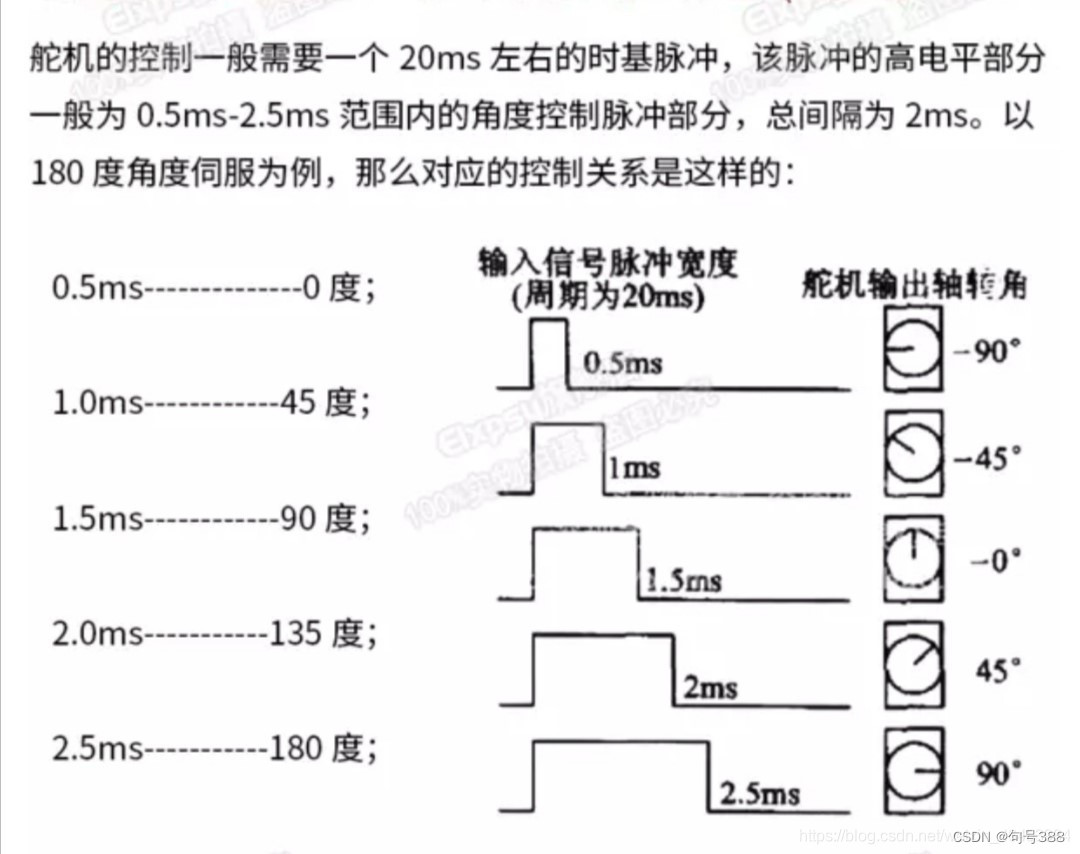
二,舵机的原理(以180度的舵机为例)
舵机的控制信号为周期是20ms的脉宽调制(PWM)信号,PWM信号的产生以正点原子的pwm输出实验为例,其中脉冲宽度从0.5ms-2.5ms,相对应舵盘的位置为0-180度,呈线性变化。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。
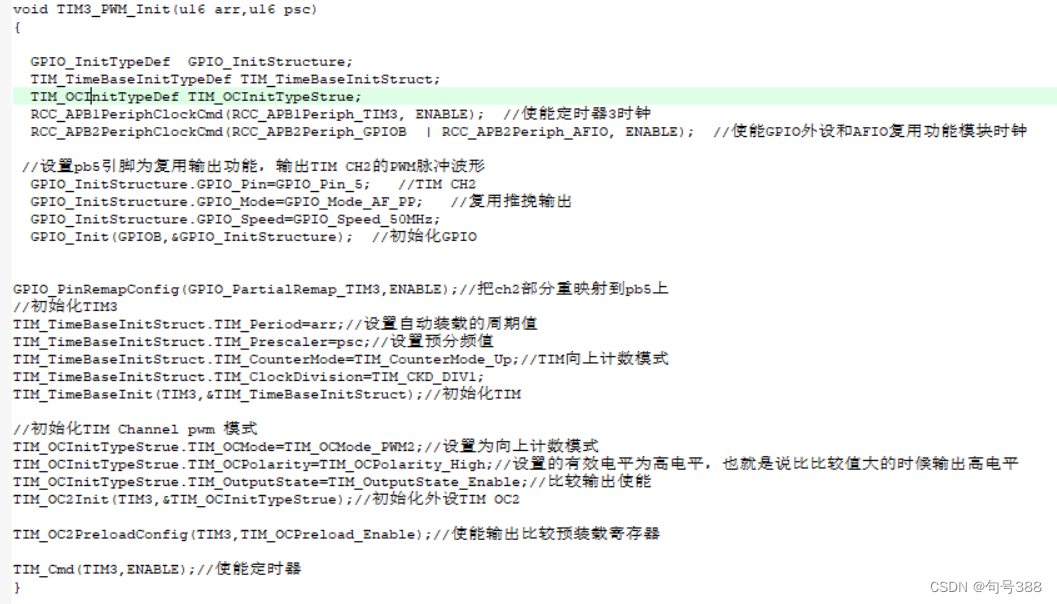
三,源码
PWM初始化函数
主函数

四,注意事项
1.周期的计算
(arr+1)*(psc+1)/tclk=20000*72/72000000=20ms
2,转动角度参数的值
2000-0.5/20=x/2000