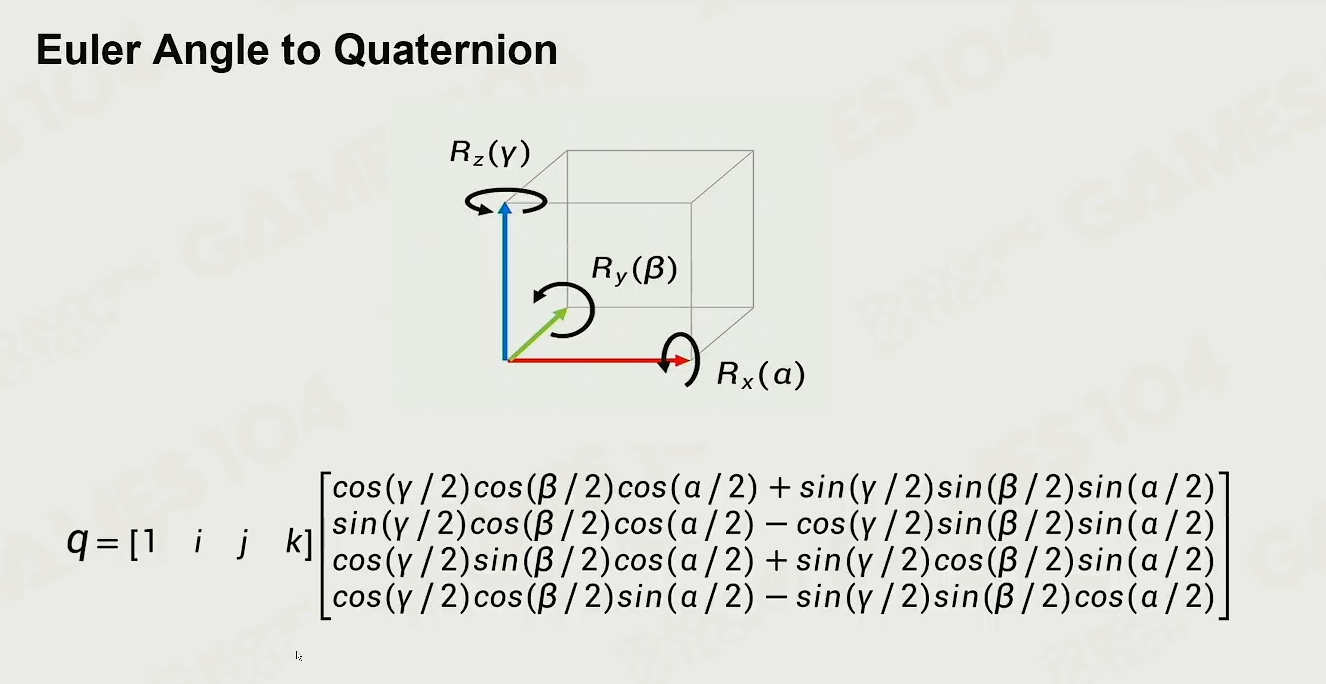
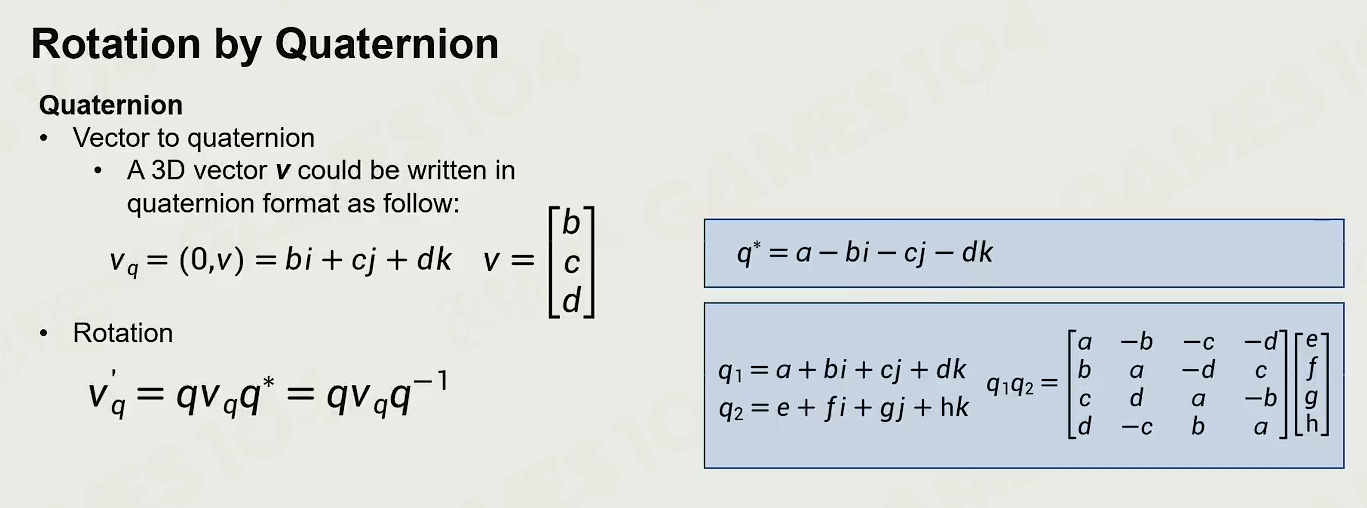
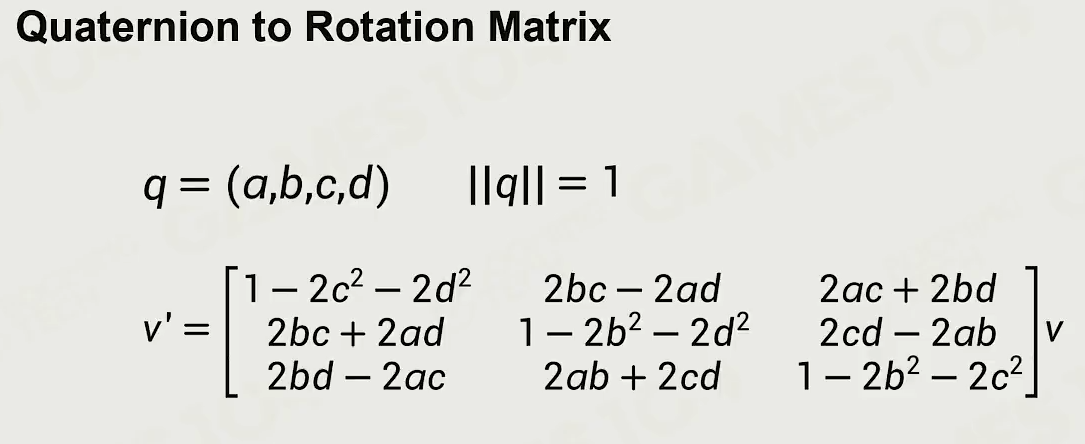
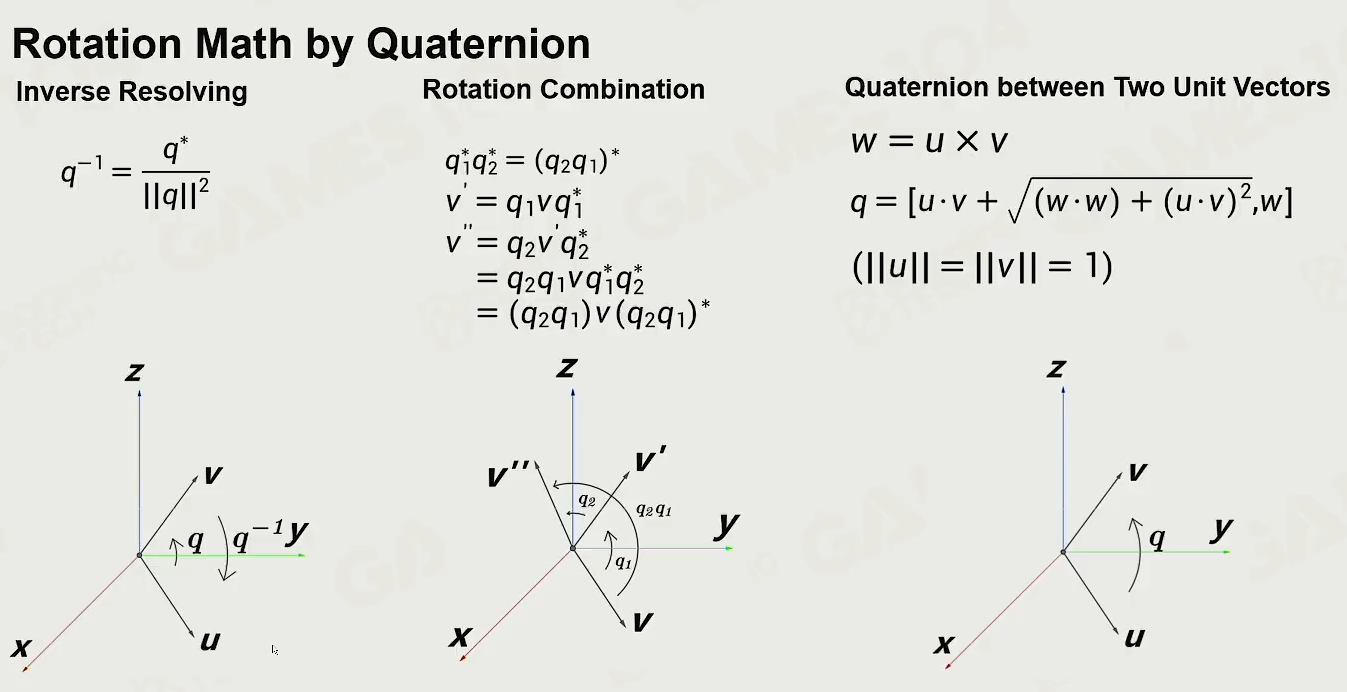
很详细,很有用的3D rotation需要的数学基础-欧拉角和四元数

猜你喜欢
转载自blog.csdn.net/qq_41286360/article/details/125287942
今日推荐
周排行