大家好,这里是【来一块葱花饼】,这次带来了目标跟踪的论文分享,与你分享~
之前做了一段时间的目标跟踪算法(以单目标跟踪SOT为主)的研究,学习了四十多篇顶会论文。所以,我新成立了专栏目标跟踪(SOT)|顶会论文|学习笔记,论文笔记与大家分享,方便大家快速了解目标跟踪的进展,掌握不同算法思想。欢迎大家讨论,在评论区写出自己的想法~
本文是ICCV-6篇的目标跟踪论文笔记,与大家分享。其他顶会论文的分析笔记,见专栏中的其他文章,欢迎关注~
具体论文分析笔记,见专栏中的其他文章,欢迎大家关注,链接如下:
目标跟踪|近三年|45篇顶会论文整理
目标跟踪|七大数据集|整理
目标跟踪|论文笔记分享|ICCV-6篇
目标跟踪|论文笔记分享|ICCV-2篇
目标跟踪|论文笔记分享|ECCV-6篇
目标跟踪|论文笔记分享|CVPR-12篇
目标跟踪|论文笔记分享|CVPR-10篇(1)
目标跟踪|论文笔记分享|CVPR-10篇(2)
文章目录
- 一.论文题目
- 二.主要思想
- 三.具体文章
-
- Learning Spatio-Temporal Transformer for Visual Tracking
- Learning to Track Objects from Unlabeled Videos
- Saliency-Associated Object Tracking
- HiFT: Hierarchical Feature Transformer for Aerial Tracking
- Learn to Match: Automatic Matching Network Design for Visual Tracking
- Learning to Adversarially Blur Visual Object Tracking
一.论文题目
| 论文题目 |
|---|
| Learning to Track Objects from Unlabeled Videos |
| Learning Spatio-Temporal Transformer for Visual Tracking |
| Learning to Adversarially Blur Visual Object Tracking |
| HiFT: Hierarchical Feature Transformer for Aerial Tracking |
| Learn to Match: Automatic Matching Network Design for Visual Tracking |
| Saliency-Associated Object Tracking |
二.主要思想
主要采用了transformer利用时空特征、无监督、关注局部显著区域、自动匹配网络并对siamese的匹配算子进行改进、对抗攻击
三.具体文章
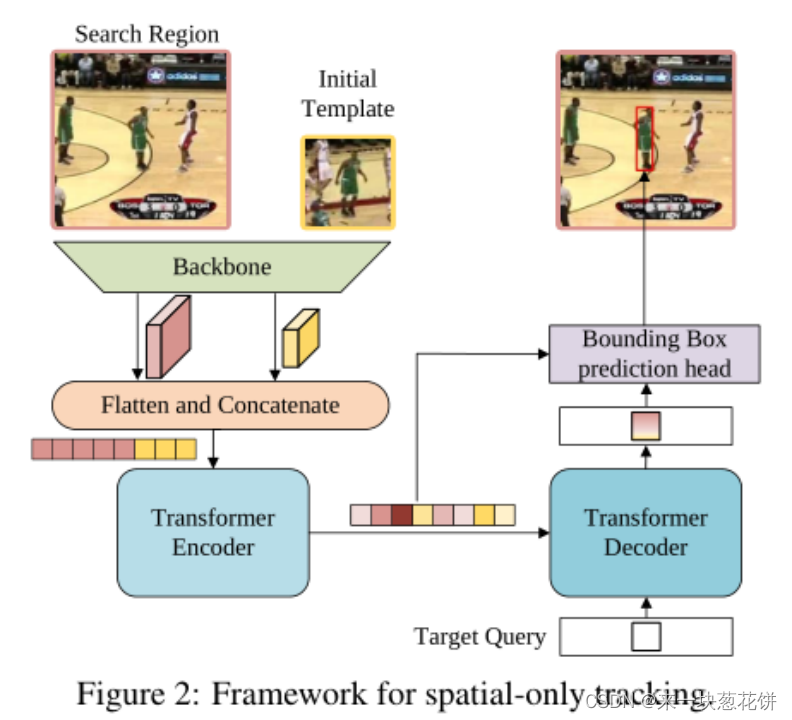
Learning Spatio-Temporal Transformer for Visual Tracking
学习用于视觉跟踪的时空transformer
本文使用transformer设计跟踪器,并且结合时空特征。
是一个很有效的方法,可以参考!
之前的Siamese系列算法,只是使用了空间特征,所以对于目标消失、对象变化过大这些场景不太友好。
使用transformer,在序列建模中解决了长距离相互作用的问题。
空间信息包含目标定位的对象外观信息,时间信息包含对象在帧间的状态变化。考虑到建模全局依赖的优越能力,tarnsformer集成空间和时间信息跟踪,生成具有鉴别性的时空特征的目标定位。
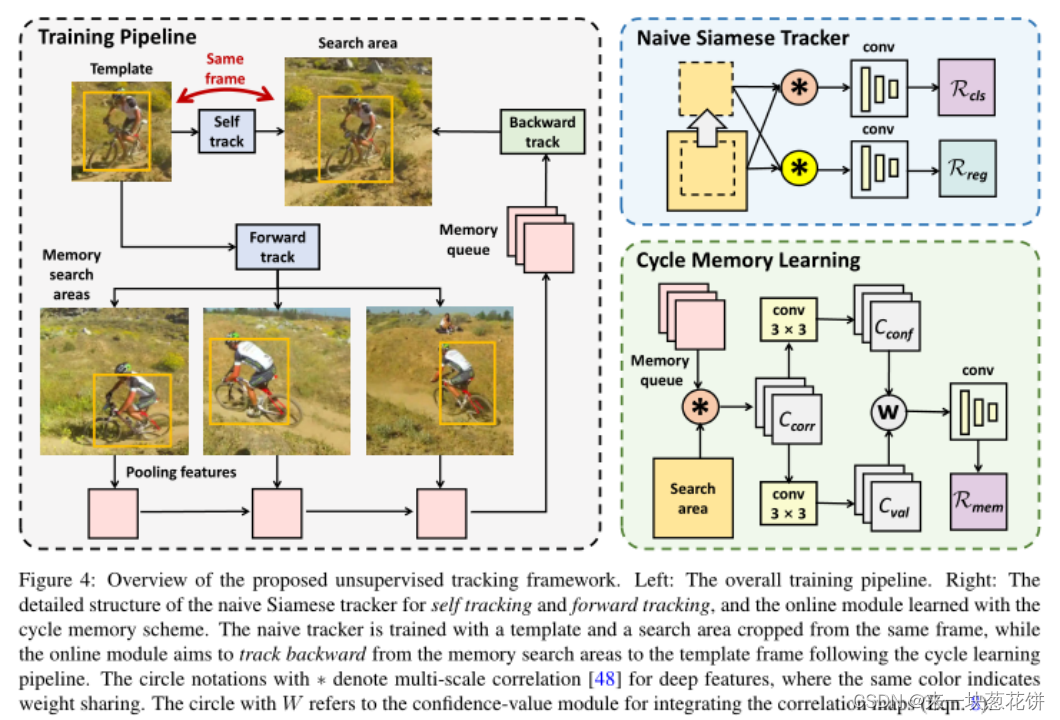
Learning to Track Objects from Unlabeled Videos
学习从未标记的视频跟踪对象
本文使用无监督的跟踪器。
找到了之前无监督跟踪的三个挑战:moving object discovery, rich temporal variation exploitation, and online update。
针对上述方法,提出了一种新的无监督跟踪方法。首先,使用无监督光流和动态规划对移动对象进行序列采样;然后使用单帧对从头开始训练一个naive的Siamese跟踪器;最后在使用一个循环记忆学习方案来训练跟踪器,来实现在线更新。
本文也提出了,目标跟踪的一个重要思路是,输入动态的不断更新的模板对象,从而保证长时间的跟踪。
综上,两个点,一个是无监督跟踪,一个是使用在线更新。
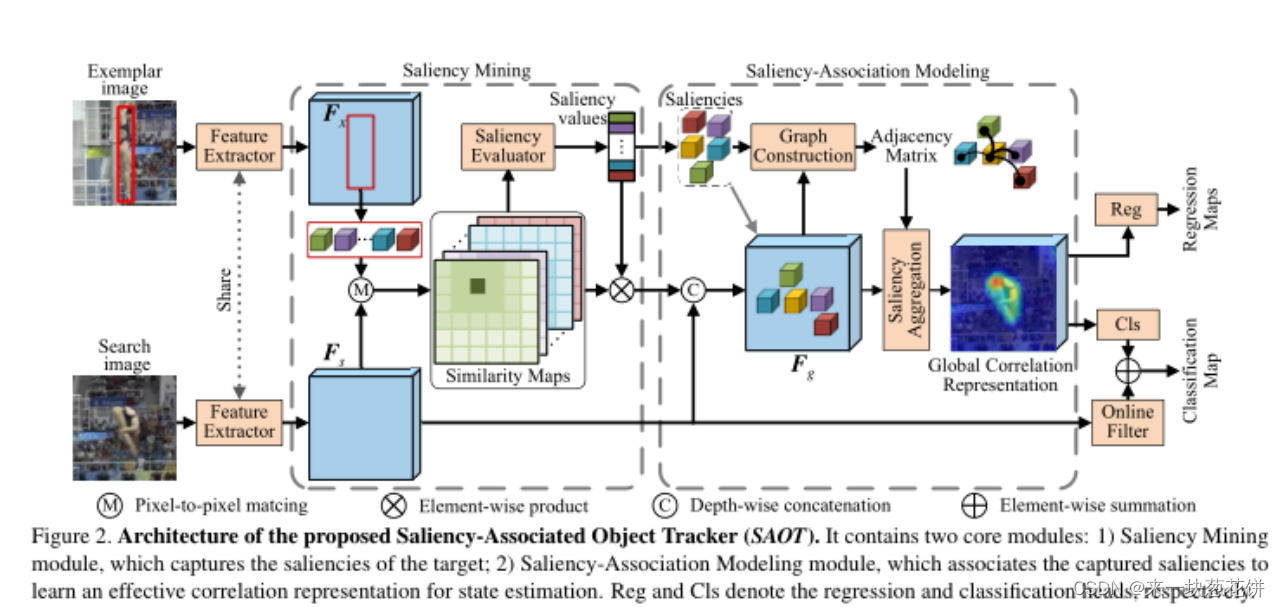
Saliency-Associated Object Tracking
显著关联对象跟踪
当前的跟踪器大多是对整个目标进行跟踪识别,但是很难跟踪各种外形变化的目标。还有一种思路是针对局部跟踪,将目标分割成相同的小块,并并行跟踪所有小块,将这些小块全部用来进行并行的跟踪。
但是实际上,很多局部的小块是无用的,会对结果造成不好的影响。
所以本文提出,基于局部的针对显著区域的跟踪,使用著性挖掘模块来捕获局部显著性,然后使用显著性关联建模模块将捕获的显著性关联在一起,来进行跟踪和状态估计。
本方法对有较大形状变化的对象,有更好的跟踪效果。
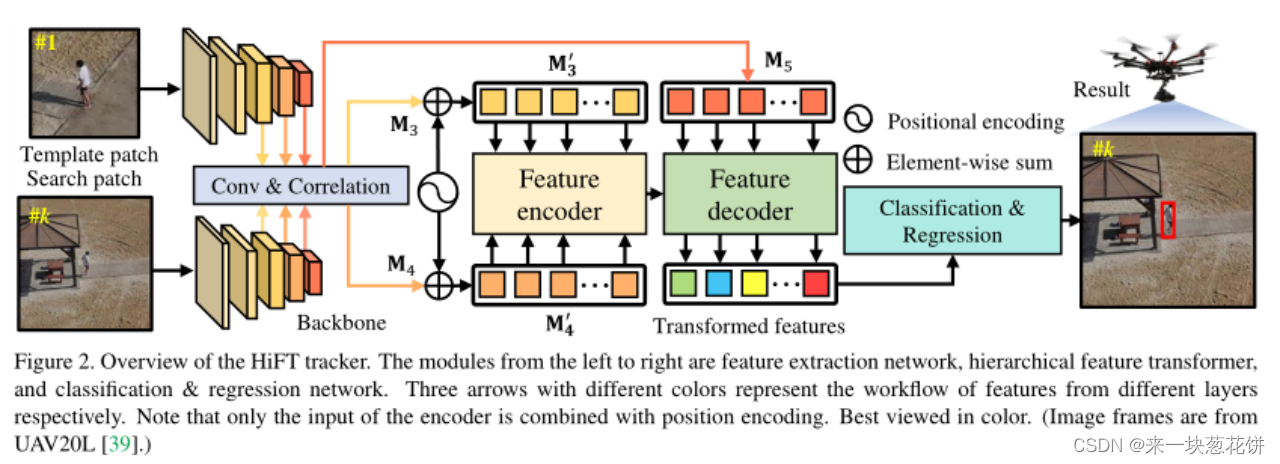
HiFT: Hierarchical Feature Transformer for Aerial Tracking
分层特征tarnsformer的空中跟踪
本文主要针对于Siamese系列跟踪方法进行改进,提出了一种高效和有效的分层特征变压器(shift)航空跟踪**。将多层次卷积层生成的层次相似图输入特征转换器,**实现空间线索(浅层)和语义线索(深层)的交互融合。
由于使用了transformer,可以更好的提取全局上下文信息,方便目标搜索;使用多层次特征学习,得到有较强可识别性的针对于跟踪的特征空间。
当然本文的场景主要是无人机的空中拍摄的低分辨率跟踪对象。
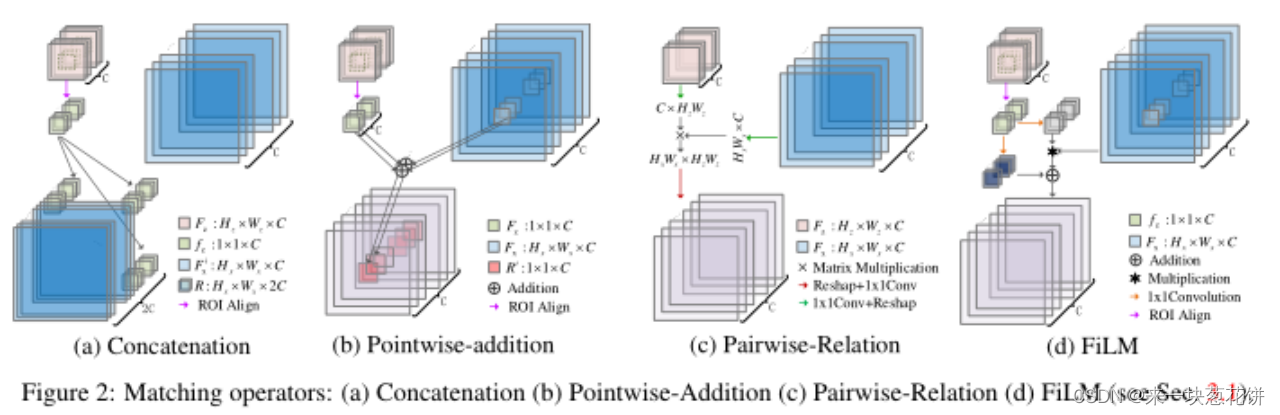
Learn to Match: Automatic Matching Network Design for Visual Tracking
学习匹配:视觉跟踪的自动匹配的网络设计
之前的Siamese系列算法效果很好,但是对于输入的模板对象和搜索对象,只是用了互相关来求相似度。两个缺点:1.启发式匹配网络设计在很大程度上依赖于专家经验。2.单一的匹配算子很难在所有具有挑战性的环境中保证稳定的跟踪
本文提出了另外六种匹配算子,以探索匹配算子选择的可行性,这其实是一种很好的思路!
我们可以将它们结合起来探索互补特征,得到更好的匹配效果。
另外,还使用了二进制信道操作(BCM)来搜索这些操作符的最优组合,自动生成多种算子的较优组合,来得到一种通用的目标跟踪模型,来满足多种复杂的目标跟踪场景。
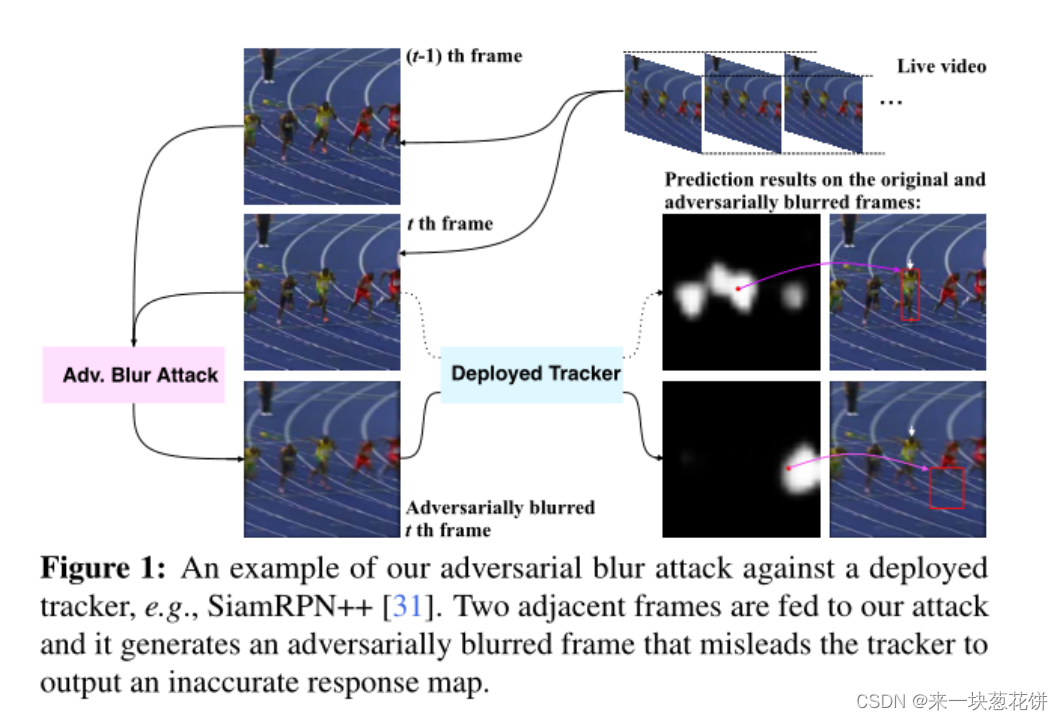
Learning to Adversarially Blur Visual Object Tracking
学习,对抗性模糊视觉目标跟踪
由于之前的目标跟踪,没有过多的讨论模糊图像下跟踪的鲁棒性,所以本文提出了对抗性模糊攻击(ABA)。
作者研究了运动模糊的产生原理,设计了视觉跟踪的模糊生成方法。
不过我们好像不太需要这样的研究场景?可能之后可以用这种方法生成对应数据集,以此训练来提高模型的鲁棒性。
之后我将在专栏目标跟踪(SOT)|顶会论文|学习笔记中,分享近三年的四十多篇顶会文章的详细笔记,方便大家快速入门。
感兴趣的同学点赞+收藏+关注,直接进入专栏进行学习~你们的支持就是我最大的动力~
感兴趣的同学点赞+收藏+关注,直接进入专栏进行学习~你们的支持就是我最大的动力~
感兴趣的同学点赞+收藏+关注,直接进入专栏进行学习~你们的支持就是我最大的动力~