OpenCV图像处理(上)
一、几何变换
1. 图像缩放
缩放是对图像的大小进行调整,即使图像放大或缩小。
API
cv2.resize(src,dsize,fx=0,fy=0,interpolation=cv2.INTER_LINEAR)
参数:
- src : 输入图像
- dsize: 绝对尺寸,直接指定调整后图像的大小
- fx,fy: 相对尺寸,将dsize设置为None,然后将fx和fy设置为比例因子即可
- interpolation:插值方法,

示例
import cv2 as cv
# 1. 读取图片
img1 = cv.imread("./image/dog.jpeg")
# 2.图像缩放
# 2.1 绝对尺寸
rows,cols = img1.shape[:2]
res = cv.resize(img1,(2*cols,2*rows),interpolation=cv.INTER_CUBIC)
# 2.2 相对尺寸
res1 = cv.resize(img1,None,fx=0.5,fy=0.5)
# 3 图像显示
# 3.1 使用opencv显示图像(不推荐)
cv.imshow("orignal",img1)
cv.imshow("enlarge",res)
cv.imshow("shrink)",res1)
cv.waitKey(0)
# 3.2 使用matplotlib显示图像
fig,axes=plt.subplots(nrows=1,ncols=3,figsize=(10,8),dpi=100)
axes[0].imshow(res[:,:,::-1])
axes[0].set_title("绝对尺度(放大)")
axes[1].imshow(img1[:,:,::-1])
axes[1].set_title("原图")
axes[2].imshow(res1[:,:,::-1])
axes[2].set_title("相对尺度(缩小)")
plt.show()

2. 图像平移
图像平移将图像按照指定方向和距离,移动到相应的位置。
API
cv.warpAffine(img,M,dsize)
参数:
-
img: 输入图像
-
M: 2∗3移动矩阵
-
对于(x,y)处的像素点,要把它移动到 ( x + t x , y + t y ) (x+t_x,y+t_y) (x+tx,y+ty)处时,M矩阵应如下设置:
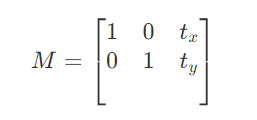
注意:将M设置为np.float32类型的Numpy数组。 -
dsize: 输出图像的大小
注意:输出图像的大小,它应该是(宽度,高度)的形式。请记住,width=列数,height=行数。
示例
需求是将图像的像素点移动(50,100)的距离:
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1. 读取图像
img1 = cv.imread("./image/image2.jpg")
# 2. 图像平移
rows,cols = img1.shape[:2]
M = M = np.float32([[1,0,100],[0,1,50]])# 平移矩阵
dst = cv.warpAffine(img1,M,(cols,rows))
# 3. 图像显示
fig,axes=plt.subplots(nrows=1,ncols=2,figsize=(10,8),dpi=100)
axes[0].imshow(img1[:,:,::-1])
axes[0].set_title("原图")
axes[1].imshow(dst[:,:,::-1])
axes[1].set_title("平移后结果")
plt.show()

3. 图像旋转
图像旋转是指图像按照某个位置转动一定角度的过程,旋转中图像仍保持这原始尺寸。图像旋转后图像的水平对称轴、垂直对称轴及中心坐标原点都可能会发生变换,因此需要对图像旋转中的坐标进行相应转换。
那图像是怎么进行旋转的呢?如下图所示:

假设图像逆时针旋转\thetaθ,则根据坐标转换可得旋转转换为:
其中:

带入上面的公式中,有:
也可以写成:

同时我们要修正原点的位置,因为原图像中的坐标原点在图像的左上角,经过旋转后图像的大小会有所变化,原点也需要修正。
假设在旋转的时候是以旋转中心为坐标原点的,旋转结束后还需要将坐标原点移到图像左上角,也就是还要进行一次变换。


在OpenCV中图像旋转首先根据旋转角度和旋转中心获取旋转矩阵,然后根据旋转矩阵进行变换,即可实现任意角度和任意中心的旋转效果。
API
cv2.getRotationMatrix2D(center, angle, scale)
参数:
- center:旋转中心
- angle:旋转角度
- scale:缩放比例
返回:
- M:旋转矩阵
调用cv.warpAffine完成图像的旋转
示例
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 读取图像
img = cv.imread("./image/image2.jpg")
# 2 图像旋转
rows,cols = img.shape[:2]
# 2.1 生成旋转矩阵
M = cv.getRotationMatrix2D((cols/2,rows/2),90,1)
# 2.2 进行旋转变换
dst = cv.warpAffine(img,M,(cols,rows))
# 3 图像展示
fig,axes=plt.subplots(nrows=1,ncols=2,figsize=(10,8),dpi=100)
axes[0].imshow(img1[:,:,::-1])
axes[0].set_title("原图")
axes[1].imshow(dst[:,:,::-1])
axes[1].set_title("旋转后结果")
plt.show()

4. 仿射变换
图像的仿射变换涉及到图像的形状位置角度的变化,是深度学习预处理中常到的功能,仿射变换主要是对图像的缩放,旋转,翻转和平移等操作的组合。
那什么是图像的仿射变换,如下图所示,图1中的点1, 2 和 3 与图二中三个点一一映射, 仍然形成三角形, 但形状已经大大改变,通过这样两组三点(感兴趣点)求出仿射变换, 接下来我们就能把仿射变换应用到图像中所有的点中,就完成了图像的仿射变换。

在OpenCV中,仿射变换的矩阵是一个2×3的矩阵,

其中左边的2×2子矩阵 A A A是线性变换矩阵,右边的2×1子矩阵 B B B是平移项:

对于图像上的任一位置(x,y),仿射变换执行的是如下的操作:

需要注意的是,对于图像而言,宽度方向是x,高度方向是y,坐标的顺序和图像像素对应下标一致。所以原点的位置不是左下角而是右上角,y的方向也不是向上,而是向下。
在仿射变换中,原图中所有的平行线在结果图像中同样平行。为了创建这个矩阵我们需要从原图像中找到三个点以及他们在输出图像中的位置。然后cv2.getAffineTransform 会创建一个 2x3 的矩阵,最后这个矩阵会被传给函数 cv2.warpAffine。
示例
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 图像读取
img = cv.imread("./image/image2.jpg")
# 2 仿射变换
rows,cols = img.shape[:2]
# 2.1 创建变换矩阵
pts1 = np.float32([[50,50],[200,50],[50,200]])
pts2 = np.float32([[100,100],[200,50],[100,250]])
M = cv.getAffineTransform(pts1,pts2)
# 2.2 完成仿射变换
dst = cv.warpAffine(img,M,(cols,rows))
# 3 图像显示
fig,axes=plt.subplots(nrows=1,ncols=2,figsize=(10,8),dpi=100)
axes[0].imshow(img[:,:,::-1])
axes[0].set_title("原图")
axes[1].imshow(dst[:,:,::-1])
axes[1].set_title("仿射后结果")
plt.show()

5. 透射变换
透射变换是视角变化的结果,是指利用透视中心、像点、目标点三点共线的条件,按透视旋转定律使承影面(透视面)绕迹线(透视轴)旋转某一角度,破坏原有的投影光线束,仍能保持承影面上投影几何图形不变的变换。

它的本质将图像投影到一个新的视平面,其通用变换公式为:

其中,(u,v)是原始的图像像素坐标,w取值为1,(x=x’/z’,y=y’/z’)是透射变换后的结果。后面的矩阵称为透视变换矩阵,一般情况下,我们将其分为三部分:

其中:T1表示对图像进行线性变换,T2对图像进行平移,T3表示对图像进行投射变换, a 22 a_{22} a22 一般设为1.
在opencv中,我们要找到四个点,其中任意三个不共线,然后获取变换矩阵T,再进行透射变换。通过函数cv.getPerspectiveTransform找到变换矩阵,将cv.warpPerspective应用于此3x3变换矩阵。
示例
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 读取图像
img = cv.imread("./image/image2.jpg")
# 2 透射变换
rows,cols = img.shape[:2]
# 2.1 创建变换矩阵
pts1 = np.float32([[56,65],[368,52],[28,387],[389,390]])
pts2 = np.float32([[100,145],[300,100],[80,290],[310,300]])
T = cv.getPerspectiveTransform(pts1,pts2)
# 2.2 进行变换
dst = cv.warpPerspective(img,T,(cols,rows))
# 3 图像显示
fig,axes=plt.subplots(nrows=1,ncols=2,figsize=(10,8),dpi=100)
axes[0].imshow(img[:,:,::-1])
axes[0].set_title("原图")
axes[1].imshow(dst[:,:,::-1])
axes[1].set_title("透射后结果")
plt.show()

6. 图像金字塔
图像金字塔是图像多尺度表达的一种,最主要用于图像的分割,是一种以多分辨率来解释图像的有效但概念简单的结构。
图像金字塔用于机器视觉和图像压缩,一幅图像的金字塔是一系列以金字塔形状排列的分辨率逐步降低,且来源于同一张原始图的图像集合。其通过梯次向下采样获得,直到达到某个终止条件才停止采样。
金字塔的底部是待处理图像的高分辨率表示,而顶部是低分辨率的近似,层级越高,图像越小,分辨率越低。

API
cv.pyrUp(img) #对图像进行上采样
cv.pyrDown(img) #对图像进行下采样
示例
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 图像读取
img = cv.imread("./image/image2.jpg")
# 2 进行图像采样
up_img = cv.pyrUp(img) # 上采样操作
img_1 = cv.pyrDown(img) # 下采样操作
# 3 图像显示
cv.imshow('enlarge', up_img)
cv.imshow('original', img)
cv.imshow('shrink', img_1)
cv.waitKey(0)
cv.destroyAllWindows()

二、形态学操作
1. 连通性
在图像中,最小的单位是像素,每个像素周围有8个邻接像素,常见的邻接关系有3种:4邻接、8邻接和D邻接。分别如下图所示:

-
4邻接:像素p(x,y)的4邻域是:(x+1,y);(x-1,y);(x,y+1);(x,y-1),用 N 4 ( p ) N_4(p) N4(p)表示像素p的4邻接
-
D邻接:像素p(x,y)的D邻域是:对角上的点 (x+1,y+1);(x+1,y-1);(x-1,y+1);(x-1,y-1),用 N D ( p ) N_D(p) ND(p)表示像素p的D邻域
-
8邻接:像素p(x,y)的8邻域是: 4邻域的点 + D邻域的点,用 N 8 ( p ) N_{8}(p) N8(p)表示像素p的8邻域
连通性是描述区域和边界的重要概念,两个像素连通的两个必要条件是:
-
两个像素的位置是否相邻
-
两个像素的灰度值是否满足特定的相 似性准则(或者是否相等
根据连通性的定义,有4联通、8联通和m联通三种。
- 4联通:对于具有值 V V V的像素p和q,如果 q q q在集合 N 4 ( p ) N_4(p) N4(p)中,则称这两个像素是4连通。
- 8联通:对于具有值 V V V的像素p和q,如果 q q q在集 合 N 8 ( p ) N_8(p) N8(p)中,则称这两个像素是8连通。

- 对于具有值 V V V的像素 p p p和 q q q,如果:

则称这两个像素是m连通的,即4连通和D连通的混合连通。

2. 形态学操作
形态学转换是基于图像形状的一些简单操作。它通常在二进制图像上执行。腐蚀和膨胀是两个基本的形态学运算符。然后它的变体形式如开运算,闭运算,礼帽黑帽等。
2.1 腐蚀和膨胀
腐蚀和膨胀是最基本的形态学操作,腐蚀和膨胀都是针对白色部分(高亮部分)而言的。
膨胀就是使图像中高亮部分扩张,效果图拥有比原图更大的高亮区域;腐蚀是原图中的高亮区域被蚕食,效果图拥有比原图更小的高亮区域。膨胀是求局部最大值的操作,腐蚀是求局部最小值的操作。
(1)腐蚀
具体操作是:用一个结构元素扫描图像中的每一个像素,用结构元素中的每一个像素与其覆盖的像素做“与”操作,如果都为1,则该像素为1,否则为0。如下图所示,结构A被结构B腐蚀后:

腐蚀的作用是消除物体边界点,使目标缩小,可以消除小于结构元素的噪声点。
API:
cv.erode(img,kernel,iterations)
参数:
- img: 要处理的图像
- kernel: 核结构
- iterations: 腐蚀的次数,默认是1
(2)膨胀
具体操作是:用一个结构元素扫描图像中的每一个像素,用结构元素中的每一个像素与其覆盖的像素做“与”操作,如果都为0,则该像素为0,否则为1。如下图所示,结构A被结构B膨胀后:

膨胀的作用是将与物体接触的所有背景点合并到物体中,使目标增大,可添补目标中的孔洞。
API:
cv.dilate(img,kernel,iterations)
参数:
- img: 要处理的图像
- kernel: 核结构
- iterations: 腐蚀的次数,默认是1
示例
我们使用一个5*5的卷积核实现腐蚀和膨胀的运算:
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 读取图像
img = cv.imread("./image/image3.png")
# 2 创建核结构
kernel = np.ones((5, 5), np.uint8)
# 3 图像腐蚀和膨胀
erosion = cv.erode(img, kernel) # 腐蚀
dilate = cv.dilate(img,kernel) # 膨胀
# 4 图像展示
fig,axes=plt.subplots(nrows=1,ncols=3,figsize=(10,8),dpi=100)
axes[0].imshow(img)
axes[0].set_title("原图")
axes[1].imshow(erosion)
axes[1].set_title("腐蚀后结果")
axes[2].imshow(dilate)
axes[2].set_title("膨胀后结果")
plt.show()

2.2 开闭运算
开运算和闭运算是将腐蚀和膨胀按照一定的次序进行处理。 但这两者并不是可逆的,即先开后闭并不能得到原来的图像。
(1)开运算
开运算是先腐蚀后膨胀,其作用是:分离物体,消除小区域。特点:消除噪点,去除小的干扰块,而不影响原来的图像。

(2)闭运算
闭运算与开运算相反,是先膨胀后腐蚀,作用是消除/“闭合”物体里面的孔洞,特点:可以填充闭合区域。

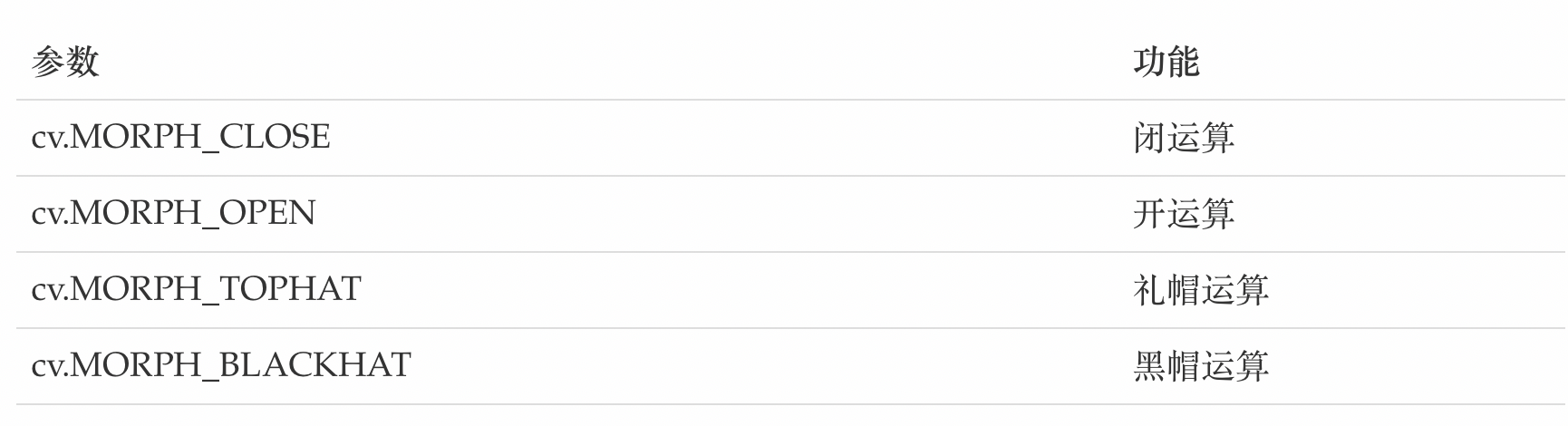
API
cv.morphologyEx(img, op, kernel)
参数:
- img: 要处理的图像
- op: 处理方式:若进行开运算,则设为cv.MORPH_OPEN,若进行闭运算,则设为cv.MORPH_CLOSE
- Kernel: 核结构
示例
使用10*10的核结构对卷积进行开闭运算的实现。
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 读取图像
img1 = cv.imread("./image/image5.png")
img2 = cv.imread("./image/image6.png")
# 2 创建核结构
kernel = np.ones((10, 10), np.uint8)
# 3 图像的开闭运算
cvOpen = cv.morphologyEx(img1,cv.MORPH_OPEN,kernel) # 开运算
cvClose = cv.morphologyEx(img2,cv.MORPH_CLOSE,kernel)# 闭运算
# 4 图像展示
fig,axes=plt.subplots(nrows=2,ncols=2,figsize=(10,8))
axes[0,0].imshow(img1)
axes[0,0].set_title("原图")
axes[0,1].imshow(cvOpen)
axes[0,1].set_title("开运算结果")
axes[1,0].imshow(img2)
axes[1,0].set_title("原图")
axes[1,1].imshow(cvClose)
axes[1,1].set_title("闭运算结果")
plt.show()

2.3 礼帽和黑帽
(1)礼帽运算
原图像与“开运算“的结果图之差,如下式计算:

因为开运算带来的结果是放大了裂缝或者局部低亮度的区域,因此,从原图中减去开运算后的图,得到的效果图突出了比原图轮廓周围的区域更明亮的区域,且这一操作和选择的核的大小相关。
礼帽运算用来分离比邻近点亮一些的斑块。当一幅图像具有大幅的背景的时候,而微小物品比较有规律的情况下,可以使用顶帽运算进行背景提取。
(2)黑帽运算
为”闭运算“的结果图与原图像之差。数学表达式为:

黑帽运算后的效果图突出了比原图轮廓周围的区域更暗的区域,且这一操作和选择的核的大小相关。
黑帽运算用来分离比邻近点暗一些的斑块。
API
cv.morphologyEx(img, op, kernel)
参数:
- img: 要处理的图像
- op: 处理方式:
- Kernel: 核结构
示例
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1 读取图像
img1 = cv.imread("./image/image5.png")
img2 = cv.imread("./image/image6.png")
# 2 创建核结构
kernel = np.ones((10, 10), np.uint8)
# 3 图像的礼帽和黑帽运算
cvOpen = cv.morphologyEx(img1,cv.MORPH_TOPHAT,kernel) # 礼帽运算
cvClose = cv.morphologyEx(img2,cv.MORPH_BLACKHAT,kernel)# 黑帽运算
# 4 图像显示
fig,axes=plt.subplots(nrows=2,ncols=2,figsize=(10,8))
axes[0,0].imshow(img1)
axes[0,0].set_title("原图")
axes[0,1].imshow(cvOpen)
axes[0,1].set_title("礼帽运算结果")
axes[1,0].imshow(img2)
axes[1,0].set_title("原图")
axes[1,1].imshow(cvClose)
axes[1,1].set_title("黑帽运算结果")
plt.show()
