利用DAIR-V2X标注数据进行3D可视化
1、下载DAIR-V2X数据集
下载链接:https://thudair.baai.ac.cn/index
我下载的是车路协同3D检测,里面图片较为连续,可以后续拼接为视频。其他数据集的帧间隔较大。
2、下载可视化代码并安装依赖项
可视化代码参考https://github.com/huahuasousou/dair_v2x_i_dataset_vis
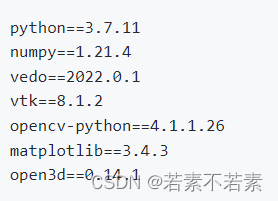
运行 Python 文件遇到问题 ModuleNotFoundError: No module named ‘yaml’ 时,说明当前 Python 环境缺少该包,使用 pip 安装该包即可,但要注意的是安装的包名不是 yaml 而是 pyyaml,即 pip install pyyaml
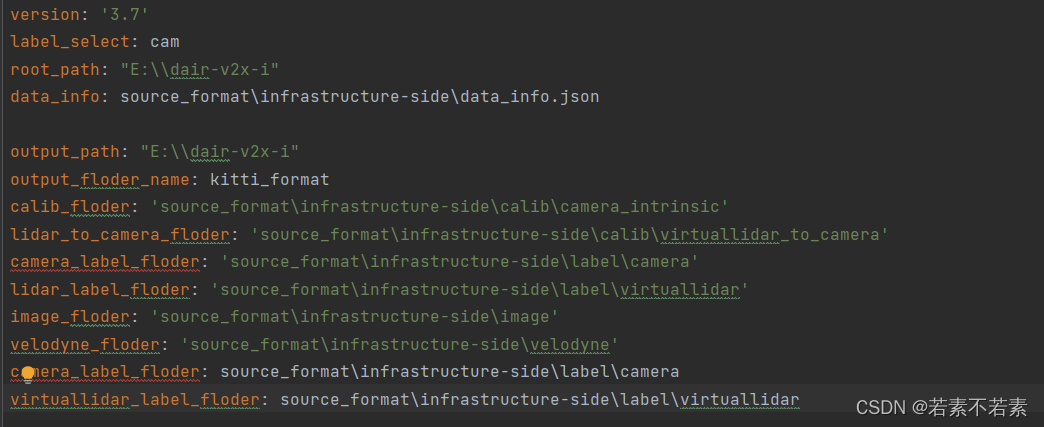
3、修改配置文件
config/config.yaml
修改目标路径以及文件结构,修改为自己的路径
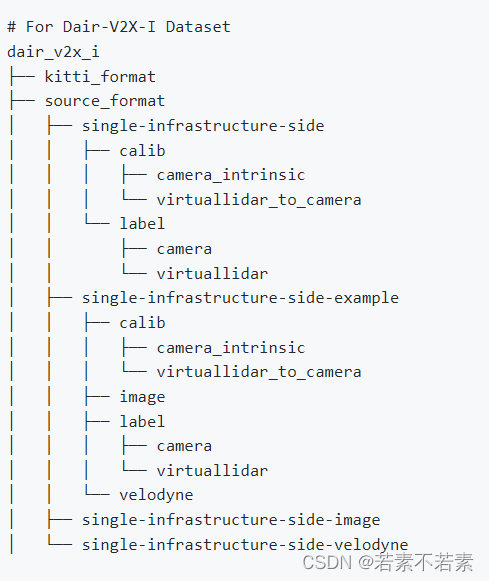
kitti_format空文件夹,存放的是转化后的kitti数据格式结果
source_format存放的是DAIR-V2X数据集
4、转换为kitti数据格式
运行convert.py
报错unsupported operand type(s) for +: ‘float’ and ‘str’
之前运行路侧3D可视化时,并没有报错,唯一可能是路侧3D数据和车路协同数据的json文件格式不一样
路侧3D数据文件:

车路协同文件:

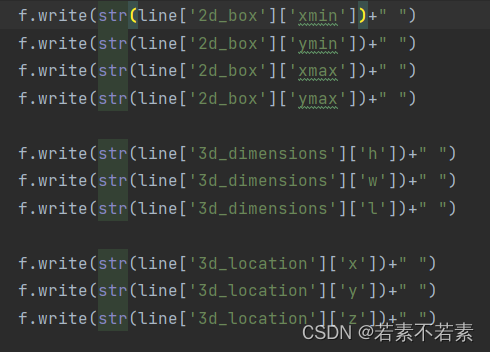
很明显,一个为字符串另一个为浮点数。所以需要统一转为str形式
报错处修改代码
之后运行convert.py

成功后如上图所示
5、3D可视化
运行dair_3D_detection_viewer.py
报错FileNotFoundError: [WinError 3] 系统找不到指定的路径。: ‘E:\dair-v2x-i\kitti_format\label_0410’
定位错误位置在\dataset\dair_dataset.py

修改为
if self.label_select=='cam':
self.label_path=os.path.join(self.root_path,"label_2")
同理接下来的报错 也按照这个逻辑修改,对应为生成的kitti_format内的文件名
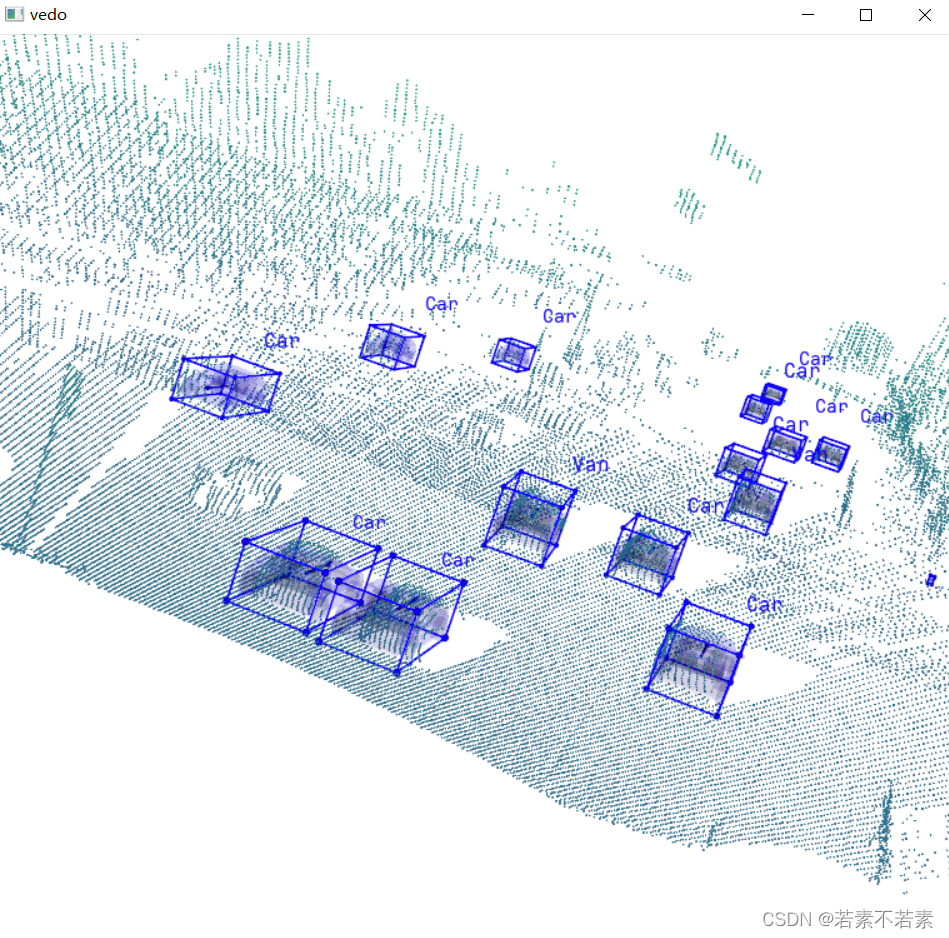
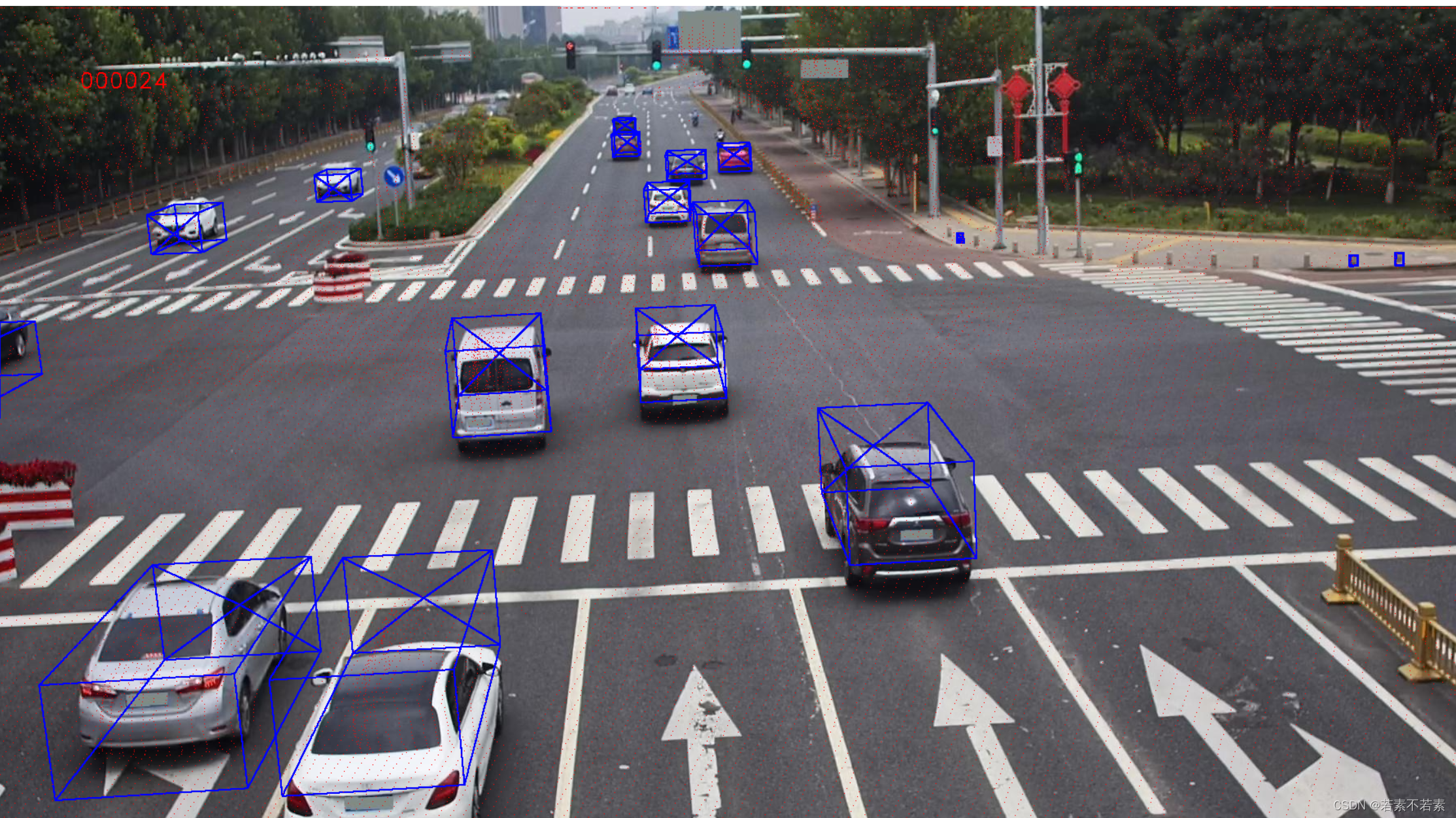
6、结果展示
点云可视化
图像可视化
在点云可视化窗口按空格,切换下一帧