Backbone :Focus + BottleneckCSP+SPP
Focus

CSP/C3

SPP
class SPP(nn.Module):
def __init__(self):
super().__init__()
self.maxpool1 = nn.MaxPool2d(kernel_size = 5, stride = 1, padding=2)
self.maxpool2 = nn.MaxPool2d(9, 1, padding=4)
self.maxpool3 = nn.MaxPool2d(13, 1, padding=6)
def forward(self, x):
o1 = self.maxpool1(x)
o2 = self.maxpool2(x)
o3 = self.maxpool3(x)
return torch.cat([x, o1, o2, o3], dim=1)
空间金字塔池化层(SPP Layer),其优势在于不用固定图像输入的尺寸即可产生相同大小的输出特征,同时融合了多尺度池化信息。
从SPP改进为SPPF后,模型的计算量变小了很多
class SPPF(nn.Module):
# Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
super().__init__()
c_ = c1 // 2 # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_ * 4, c2, 1, 1)
self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
def forward(self, x):
x = self.cv1(x)
with warnings.catch_warnings():
warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
y1 = self.m(x)
y2 = self.m(y1)
return self.cv2(torch.cat((x, y1, y2, self.m(y2)), 1))
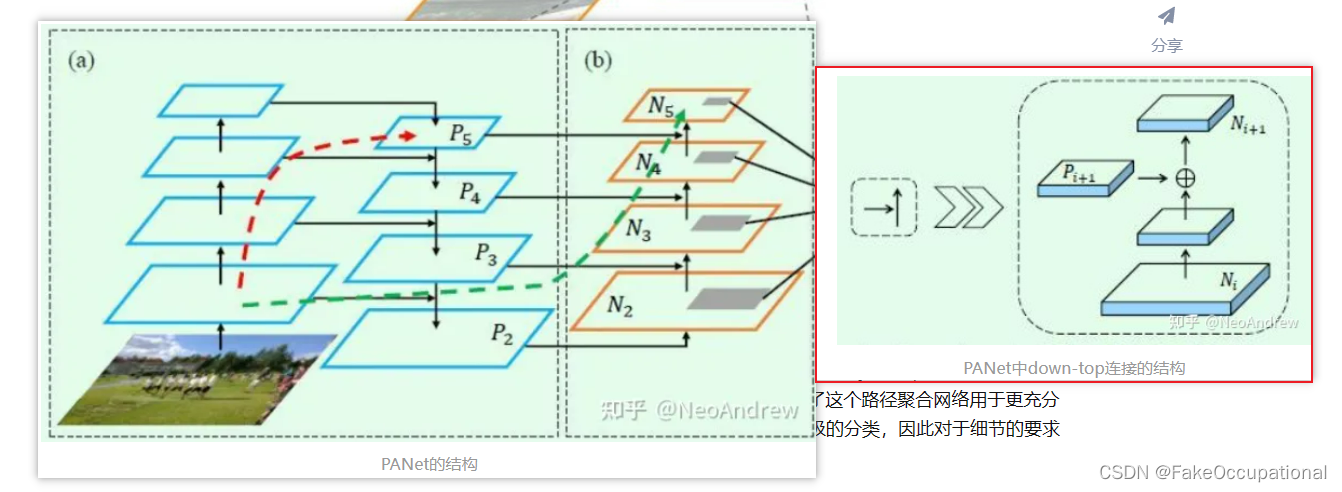
PANet PANet是一个加强版的FPN
和Yolov3的FPN层不同,Yolov4在FPN层的后面还添加了一个自底向上的特征金字塔。这样结合操作,FPN层自顶向下传达强语义特征,而特征金字塔则自底向上传达强定位特征,两两联手,从不同的主干层对不同的检测层进行参数聚合,这样的操作确实很皮。
-
FPN:最顶层的特征会经过x2的上采样插值后和底层feature map相加
-
目标检测的FPN和Unet有差别吗? FPN的“放大”部分是直接插值放大的,没有deconvolution的filters学习参数;U-Net“放大”部分就是Decoder,需要deconvolution的filters学习参数的。FPN对每一个融合的层都做detection;U-Net 只在最后一层做segmentation的pixel预测
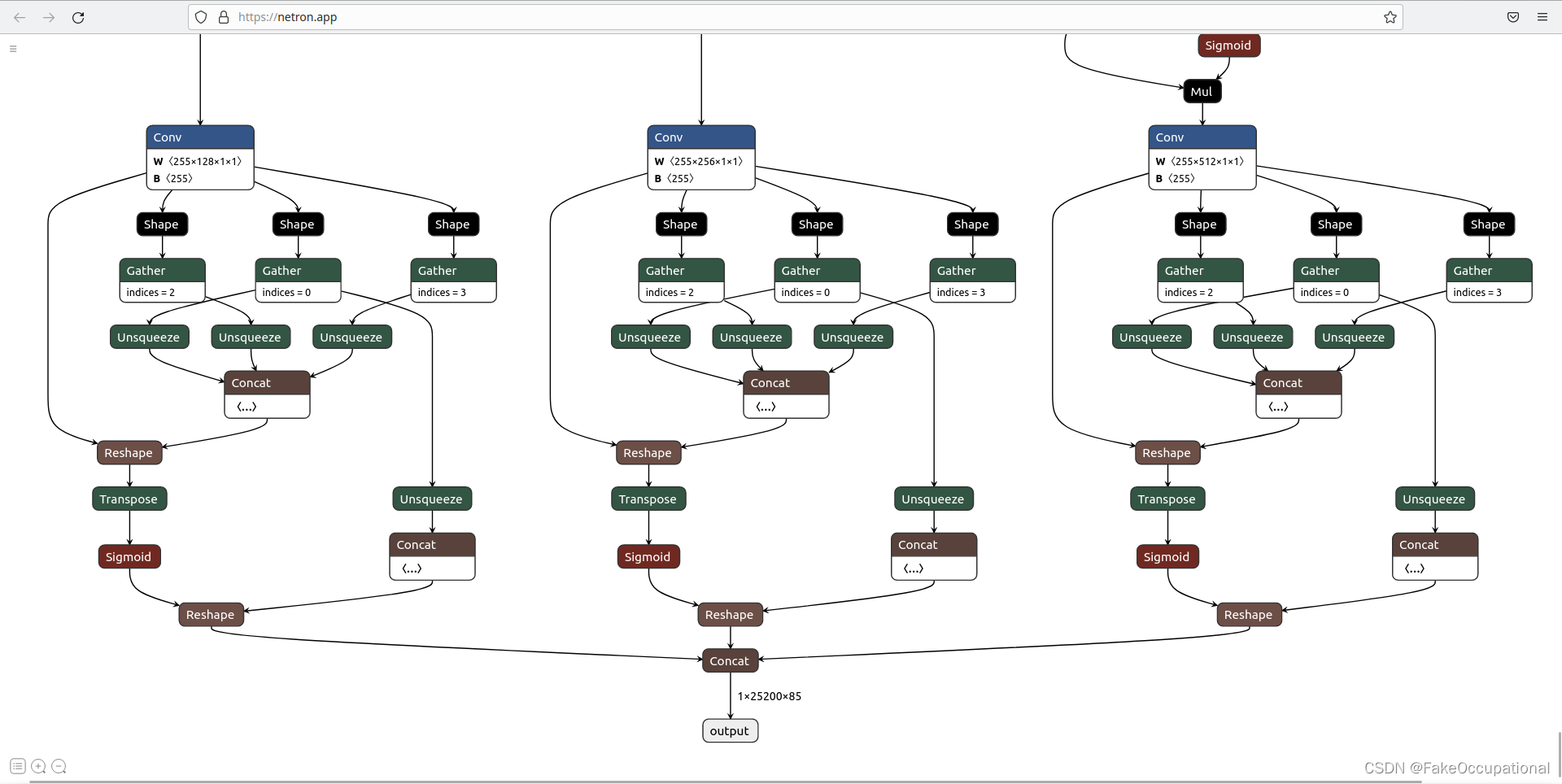
HEAD
OUT
- 输出80 * 80*255(40 * 40*255,20 * 20*255)
边界框匹配与损失
1 将归一化中心点位置、宽高映射到640。
2 计算中心点在80 * 80的位置,
3 分别计算3个anchor与映射后gt宽高的宽和高的比,宽高比满足条件时才计算矩形框损失(将3*80*80对应值设置为true,false不加入到loss)
4 矩形框损失计算 L1、L2、smooth L1损失函数
IOU损失
这种计算方法的前提假设是中心点x坐标、中心点y坐标、宽、高这四个值是相互独立的,实际上它们具有相关性,所以该计算方法存在问题。
置信度损失计算原理
yolo之前版本直接对mask矩阵为true的地方赋值1,mask矩阵为false的地方赋值0。yolov5版本mask为true的位置不直接赋1,而是计算对应预测框与目标框的CIOU,需要对CIOU做一个截断处理:当CIOU小于0时直接取0值作为标签。
9个ancher的使用:
宽、高最小的anchor0、anchor1、anchor2分配给80 * 80网格的每个格子;
宽、高次小的anchor3、anchor4、anchor5分配给40 * 40网格的每个格子;
宽、高最大的anchor6、anchor7、anchor8分配给20 * 20网格的每个格子。
yaml
# parameters
nc: 3 # number of classes
depth_multiple: 0.67 # model depth multiple 控制模型大小:将乘上backbone的umbers再取整
width_multiple: 0.75 # layer channel multiple 控制模型大小:控制输出
# anchors
anchors:
- [10,13, 16,30, 33,23] # P3/8 在最大的特征图上的锚框 一般希望在大的特征图上去检测小目标,因为大特征图才含有更多小目标信息 https://blog.csdn.net/qq_27278957/article/details/120036450
- [30,61, 62,45, 59,119] # P4/16 在中间的特征图上的锚框
- [116,90, 156,198, 373,326] # P5/32 在最小的特征图上的锚框
# YOLOv5 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2 from=-1 表示当前层的输入由上一阶段获取 [64, 3] 中64表示输出channels(需要*width_multiple)
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4 [128, 3, 2] 中 3, 2对应 卷积大小 padding
[-1, 3, BottleneckCSP, [128]], # 0-P1 第一行 Focus(下采样)的结构 https://blog.csdn.net/weixin_55073640/article/details/122539858, 详见commom.py
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 9, BottleneckCSP, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, BottleneckCSP, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
[-1, 3, BottleneckCSP, [1024, False]], # 9
]
# YOLOv5 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, BottleneckCSP, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, BottleneckCSP, [256, False]], # 17
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, BottleneckCSP, [512, False]], # 20
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, BottleneckCSP, [1024, False]], # 23
# 以上的部分可称为booleneck
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5) 17, 20, 23 表示层的标号
]
CG
-
yolov5 的 detect 层 与 anchor 机制 - - https://blog.csdn.net/weixin_44956310/article/details/121745474
-
https://zhuanlan.zhihu.com/p/563598234
-
https://zhuanlan.zhihu.com/p/540786844 DINO端到端可学习的目标监测,没有NMS
-
https://zhuanlan.zhihu.com/p/367069340从yolov1来理解yolov5
-
https://blog.csdn.net/weixin_43427721/article/details/123673383