一、环境
opencv3
Ubuntu 21.10
ncnn(最新)
二、onnx转换
此时转换onnx指令需要完整(与DNN区别)
python export.py --weights yolov5s.pt --img 640 640 --batch 1 --train --simplify --include onnx
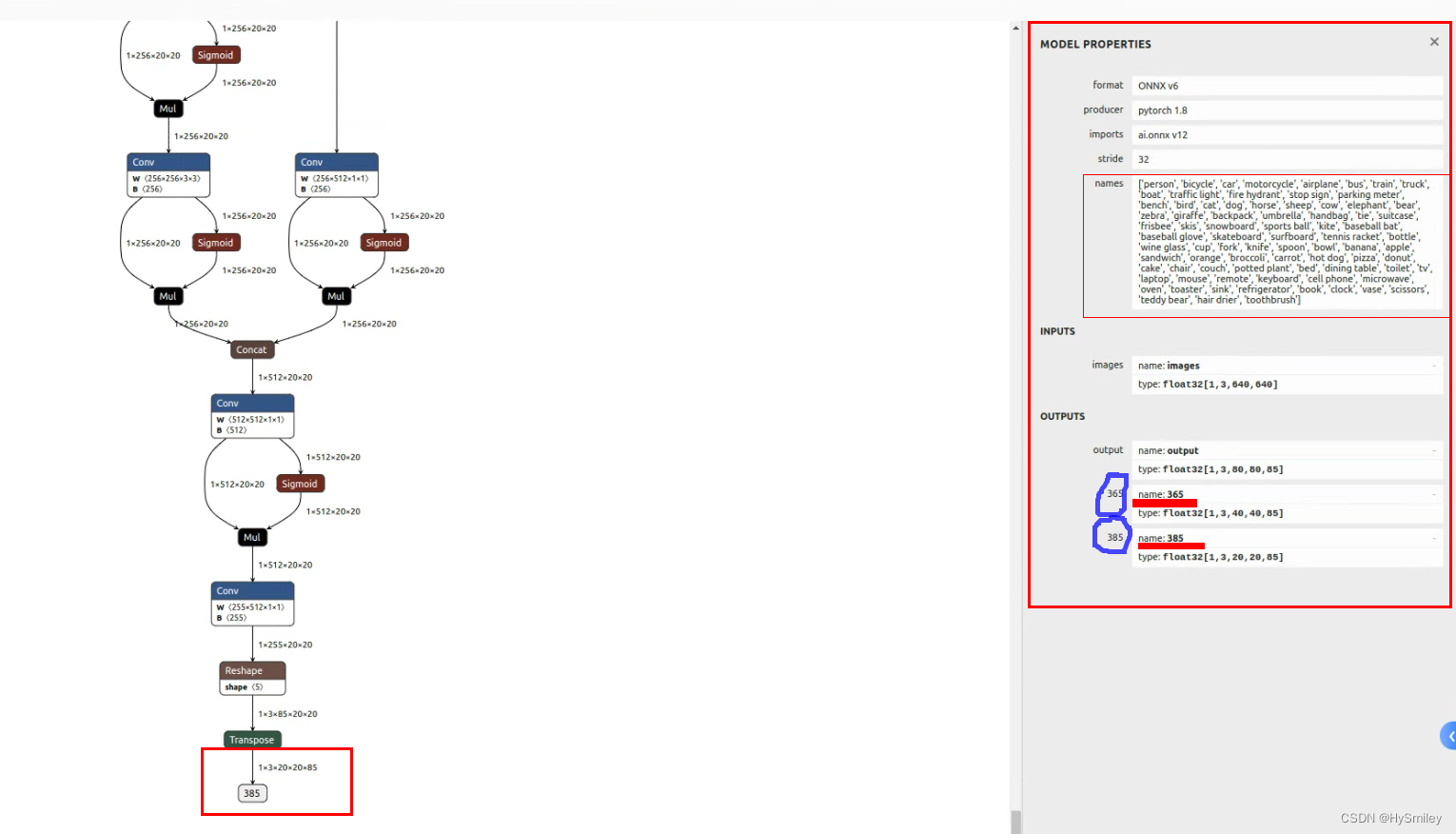
输出未合并 ,其中输出节点名称分别为:output、365、385后续需要用到
三、onnx转ncnn
在已安装的ncnn-build-tools-onnx进行转换
./onnx2ncnn yolov5s_sim.onnx yolov5s_sim.param yolov5s_sim.bin
四、修改param文件

五、推理
#include<iostream>
#include "layer.h"
#include "net.h"
#if defined(USE_NCNN_SIMPLEOCV)
#include "simpleocv.h"
#else
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#endif
#include <float.h>
#include <stdio.h>
#include <vector>
class YoloV5Focus : public ncnn::Layer
{
public:
YoloV5Focus()
{
one_blob_only = true;
}
virtual int forward(const ncnn::Mat& bottom_blob, ncnn::Mat& top_blob, const ncnn::Option& opt) const
{
int w = bottom_blob.w;
int h = bottom_blob.h;
int channels = bottom_blob.c;
int outw = w / 2;
int outh = h / 2;
int outc = channels * 4;
top_blob.create(outw, outh, outc, 4u, 1, opt.blob_allocator);
if (top_blob.empty())
return -100;
#pragma omp parallel for num_threads(opt.num_threads)
for (int p = 0; p < outc; p++)
{
const float* ptr = bottom_blob.channel(p % channels).row((p / channels) % 2) + ((p / channels) / 2);
float* outptr = top_blob.channel(p);
for (int i = 0; i < outh; i++)
{
for (int j = 0; j < outw; j++)
{
*outptr = *ptr;
outptr += 1;
ptr += 2;
}
ptr += w;
}
}
return 0;
}
};
DEFINE_LAYER_CREATOR(YoloV5Focus)
struct Object
{
cv::Rect_<float> rect;
int label;
float prob;
};
static inline float intersection_area(const Object& a, const Object& b)
{
cv::Rect_<float> inter = a.rect & b.rect;
return inter.area();
}
static void qsort_descent_inplace(std::vector<Object>& faceobjects, int left, int right)
{
int i = left;
int j = right;
float p = faceobjects[(left + right) / 2].prob;
while (i <= j)
{
while (faceobjects[i].prob > p)
i++;
while (faceobjects[j].prob < p)
j--;
if (i <= j)
{
// swap
std::swap(faceobjects[i], faceobjects[j]);
i++;
j--;
}
}
#pragma omp parallel sections
{
#pragma omp section
{
if (left < j) qsort_descent_inplace(faceobjects, left, j);
}
#pragma omp section
{
if (i < right) qsort_descent_inplace(faceobjects, i, right);
}
}
}
static void qsort_descent_inplace(std::vector<Object>& faceobjects)
{
if (faceobjects.empty())
return;
qsort_descent_inplace(faceobjects, 0, faceobjects.size() - 1);
}
static void nms_sorted_bboxes(const std::vector<Object>& faceobjects, std::vector<int>& picked, float nms_threshold)
{
picked.clear();
const int n = faceobjects.size();
std::vector<float> areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = faceobjects[i].rect.area();
}
for (int i = 0; i < n; i++)
{
const Object& a = faceobjects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const Object& b = faceobjects[picked[j]];
// intersection over union
float inter_area = intersection_area(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
picked.push_back(i);
}
}
static inline float sigmoid(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
static void generate_proposals(const ncnn::Mat& anchors, int stride, const ncnn::Mat& in_pad, const ncnn::Mat& feat_blob, float prob_threshold, std::vector<Object>& objects)
{
const int num_grid = feat_blob.h;
int num_grid_x;
int num_grid_y;
if (in_pad.w > in_pad.h)
{
num_grid_x = in_pad.w / stride;
num_grid_y = num_grid / num_grid_x;
}
else
{
num_grid_y = in_pad.h / stride;
num_grid_x = num_grid / num_grid_y;
}
const int num_class = feat_blob.w - 5;
const int num_anchors = anchors.w / 2;
for (int q = 0; q < num_anchors; q++)
{
const float anchor_w = anchors[q * 2];
const float anchor_h = anchors[q * 2 + 1];
const ncnn::Mat feat = feat_blob.channel(q);
for (int i = 0; i < num_grid_y; i++)
{
for (int j = 0; j < num_grid_x; j++)
{
const float* featptr = feat.row(i * num_grid_x + j);
// find class index with max class score
int class_index = 0;
float class_score = -FLT_MAX;
for (int k = 0; k < num_class; k++)
{
float score = featptr[5 + k];
if (score > class_score)
{
class_index = k;
class_score = score;
}
}
float box_score = featptr[4];
float confidence = sigmoid(box_score) * sigmoid(class_score);
if (confidence >= prob_threshold)
{
// yolov5/models/yolo.py Detect forward
// y = x[i].sigmoid()
// y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i].to(x[i].device)) * self.stride[i] # xy
// y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
float dx = sigmoid(featptr[0]);
float dy = sigmoid(featptr[1]);
float dw = sigmoid(featptr[2]);
float dh = sigmoid(featptr[3]);
float pb_cx = (dx * 2.f - 0.5f + j) * stride;
float pb_cy = (dy * 2.f - 0.5f + i) * stride;
float pb_w = pow(dw * 2.f, 2) * anchor_w;
float pb_h = pow(dh * 2.f, 2) * anchor_h;
float x0 = pb_cx - pb_w * 0.5f;
float y0 = pb_cy - pb_h * 0.5f;
float x1 = pb_cx + pb_w * 0.5f;
float y1 = pb_cy + pb_h * 0.5f;
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = class_index;
obj.prob = confidence;
objects.push_back(obj);
}
}
}
}
}
static int detect_yolov5(const cv::Mat& bgr, std::vector<Object>& objects)
{
ncnn::Net yolov5;
yolov5.opt.use_vulkan_compute = true;
// yolov5.opt.use_bf16_storage = true;
yolov5.register_custom_layer("YoloV5Focus", YoloV5Focus_layer_creator);
// original pretrained model from https://github.com/ultralytics/yolov5
// the ncnn model https://github.com/nihui/ncnn-assets/tree/master/models
yolov5.load_param("../../../model_m2/yolov5s-sim.param");
yolov5.load_model("../../../model_m2/yolov5s-sim.bin");
const int target_size = 640;
const float prob_threshold = 0.25f;
const float nms_threshold = 0.45f;
int img_w = bgr.cols;
int img_h = bgr.rows;
// letterbox pad to multiple of 32
int w = img_w;
int h = img_h;
float scale = 1.f;
if (w > h)
{
scale = (float)target_size / w;
w = target_size;
h = h * scale;
}
else
{
scale = (float)target_size / h;
h = target_size;
w = w * scale;
}
ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR2RGB, img_w, img_h, w, h);
// pad to target_size rectangle
// yolov5/utils/datasets.py letterbox
int wpad = (w + 31) / 32 * 32 - w;
int hpad = (h + 31) / 32 * 32 - h;
ncnn::Mat in_pad;
ncnn::copy_make_border(in, in_pad, hpad / 2, hpad - hpad / 2, wpad / 2, wpad - wpad / 2, ncnn::BORDER_CONSTANT, 114.f);
const float norm_vals[3] = {1 / 255.f, 1 / 255.f, 1 / 255.f};
in_pad.substract_mean_normalize(0, norm_vals);
ncnn::Extractor ex = yolov5.create_extractor();
ex.input("images", in_pad);
std::vector<Object> proposals;
// anchor setting from yolov5/models/yolov5s.yaml
// stride 8
{
ncnn::Mat out;
ex.extract("output", out);
ncnn::Mat anchors(6);
anchors[0] = 10.f;
anchors[1] = 13.f;
anchors[2] = 16.f;
anchors[3] = 30.f;
anchors[4] = 33.f;
anchors[5] = 23.f;
std::vector<Object> objects8;
generate_proposals(anchors, 8, in_pad, out, prob_threshold, objects8);
proposals.insert(proposals.end(), objects8.begin(), objects8.end());
}
// stride 16
{
ncnn::Mat out;
// ex.extract("781", out); //瀵瑰簲缃戠粶淇敼
#if YOLOV5_V60
ex.extract("365", out);
#else
ex.extract("365", out);
#endif
ncnn::Mat anchors(6);
anchors[0] = 30.f;
anchors[1] = 61.f;
anchors[2] = 62.f;
anchors[3] = 45.f;
anchors[4] = 59.f;
anchors[5] = 119.f;
std::vector<Object> objects16;
generate_proposals(anchors, 16, in_pad, out, prob_threshold, objects16);
proposals.insert(proposals.end(), objects16.begin(), objects16.end());
}
// stride 32
{
ncnn::Mat out;
// ex.extract("801", out); //瀵瑰簲缃戠粶淇敼
#if YOLOV5_V60
ex.extract("385", out);
#else
ex.extract("385", out);
#endif
ncnn::Mat anchors(6);
anchors[0] = 116.f;
anchors[1] = 90.f;
anchors[2] = 156.f;
anchors[3] = 198.f;
anchors[4] = 373.f;
anchors[5] = 326.f;
std::vector<Object> objects32;
generate_proposals(anchors, 32, in_pad, out, prob_threshold, objects32);
proposals.insert(proposals.end(), objects32.begin(), objects32.end());
}
// sort all proposals by score from highest to lowest
qsort_descent_inplace(proposals);
// apply nms with nms_threshold
std::vector<int> picked;
nms_sorted_bboxes(proposals, picked, nms_threshold);
int count = picked.size();
objects.resize(count);
for (int i = 0; i < count; i++)
{
objects[i] = proposals[picked[i]];
// adjust offset to original unpadded
float x0 = (objects[i].rect.x - (wpad / 2)) / scale;
float y0 = (objects[i].rect.y - (hpad / 2)) / scale;
float x1 = (objects[i].rect.x + objects[i].rect.width - (wpad / 2)) / scale;
float y1 = (objects[i].rect.y + objects[i].rect.height - (hpad / 2)) / scale;
// clip
x0 = std::max(std::min(x0, (float)(img_w - 1)), 0.f);
y0 = std::max(std::min(y0, (float)(img_h - 1)), 0.f);
x1 = std::max(std::min(x1, (float)(img_w - 1)), 0.f);
y1 = std::max(std::min(y1, (float)(img_h - 1)), 0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;
}
return 0;
}
static void draw_objects(const cv::Mat& bgr, const std::vector<Object>& objects)
{
static const char* class_names[] = {
"person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light",
"fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow",
"elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
"skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard",
"tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple",
"sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch",
"potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone",
"microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear",
"hair drier", "toothbrush"
};
cv::Mat image = bgr.clone();
for (size_t i = 0; i < objects.size(); i++)
{
const Object& obj = objects[i];
fprintf(stderr, "%d = %.5f at %.2f %.2f %.2f x %.2f\n", obj.label, obj.prob,
obj.rect.x, obj.rect.y, obj.rect.width, obj.rect.height);
cv::rectangle(image, obj.rect, cv::Scalar(255, 0, 0));
char text[256];
sprintf(text, "%s %.1f%%", class_names[obj.label], obj.prob);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > image.cols)
x = image.cols - label_size.width;
cv::rectangle(image, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255, 255, 255), -1);
cv::putText(image, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
cv::imwrite("res.jpg",image);
cv::imshow("image", image);
cv::waitKey(0);
}
int main(int argc, char** argv)
{
// if (argc != 2)
// {
// fprintf(stderr, "Usage: %s [imagepath]\n", argv[0]);
// return -1;
// }
clock_t start=clock();
const char* imagepath = "../../../data/bus.jpg";
// const char* imagepath = argv[1];
cv::Mat m = cv::imread(imagepath, 1);
if (m.empty())
{
fprintf(stderr, "cv::imread %s failed\n", imagepath);
return -1;
}
std::vector<Object> objects;
detect_yolov5(m, objects);
clock_t end=clock();
std::cout<<"run time:"<<(double)(end-start)/CLOCKS_PER_SEC<<std::endl;
draw_objects(m, objects);
return 0;
}
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(demo_detect)
find_package(OpenCV 3 REQUIRED)
find_package(ncnn REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(demo demo.cpp)
target_link_libraries(demo ${OpenCV_LIBS} ncnn)
运行结果:
