#ROS调包侠#rrt
安装
安装依赖软件
melodic版本
sudo apt install python-sklearnnoetic版本
sudo apt install python3-sklearn获取 rrt_exploration源码
由于rrt_exploration原作者所提供的代码在noetic版本下运行会有一些问题,所以我对源码做了一些修改
原作者wiki地址:rrt_exploration-ROS Wiki
cd ~/catkin_ws/srcgit clone https://gitee.com/bingda-robot/rrt_exploration.git获取仿真环境和SLAM及导航源码
cd ~/catkin_ws/srcgit clone https://gitee.com/bingda-robot/robot_navigation.gitgit clone https://gitee.com/bingda-robot/robot_description编译工作空间
cd ~/catkin_ws && catkin_make配置环境变量
由于robot_navigation中支持多款机器人,为了使仿真环境中机器人和所使用的导航参数一致,需要设置环境变量
echo "export BASE_TYPE=NanoRobot" >> ~/.bashrcsource ~/.bashrc仿真环境中运行
运行仿真环境和建图导航
roslaunch robot_description simulation.launchroslaunch robot_navigation gmapping.launch simulation:=trueroslaunch robot_navigation move_base.launch simulation:=true planner:=teb打开rviz
roslaunch rrt_exploration rrt_rviz.launch检查SLAM正常运行,并已经建立部分地图。发布一个目标点,验证导航功能正常运行
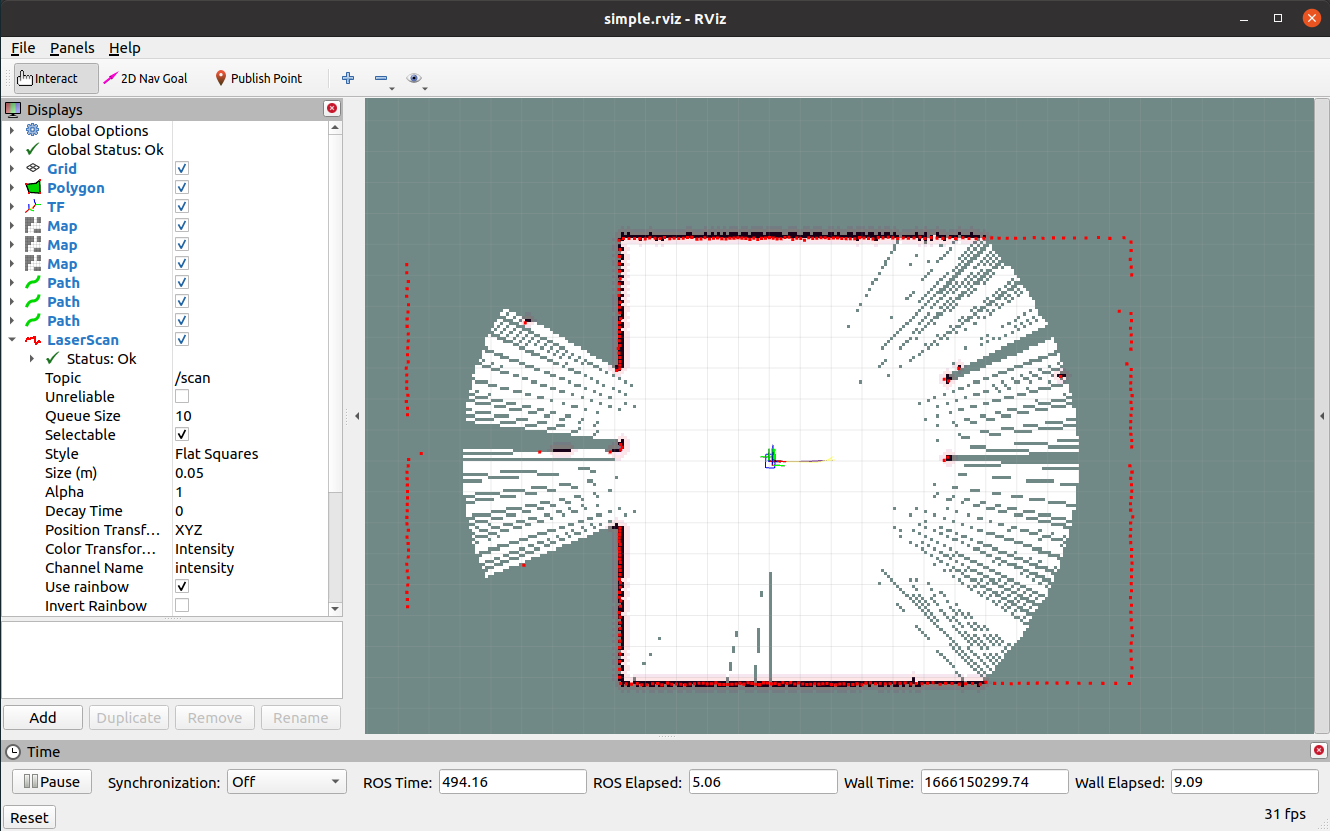
运行rrt_exploration
roslaunch rrt_exploration simple.launch在rivz中点击Publish Point按钮,一次在地图上点击左上、左下、右下和右上四个点设置地图边界,然后点击第五个点设置起始搜索方向。


参数调整
rrt中参数调整
导航参数调整
2-2-3.lidar文件夹和robot_navigation功能包代码解析_哔哩哔哩_bilibili
使用冰达机器人运行
启动机器人的SLAM建图,并设置局部路径规划器为TEB
roslaunch robot_navigation robot_slam_laser.launch planner:=teb运行rrt_exploration
和仿真中相同,rrt_exploration功能包可以运行在机器人端或PC端。后续操作和仿真环境中一致。