忙了两个星期,终于把c#版onnx调用整合到项目中,并和UI功能结合起来了~~~也终于腾出时间来总结一下,都快忘记踩过什么坑了T_T。
一,python版
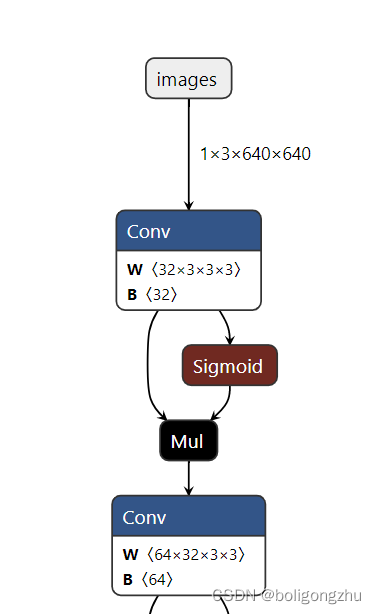
python版比较容易,毕竟有官方的detect.py指导,据说之前官方放了个使用onnx推理的ipynb文件,但很快就删了~~~参考这篇博客。通过模型结构图查看模型输入要求尺寸为[1 3 640 640]。
onnx调用的基本思想步骤就是:
- 根据EP建立session:
providers = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider'] session = ort.InferenceSession(w, providers=providers) - 调用session.run:
outputs = session.run(outname, inp)[0] - 解析并可视化结果
具体实现步骤为:
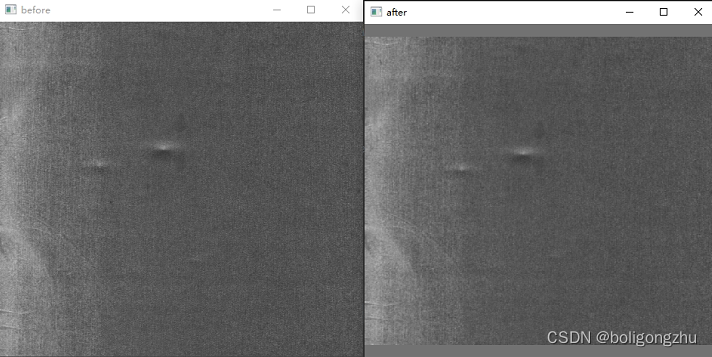
- Resize原始图片,处理成onnx模型需要的大小,这个过程是通过letterbox()函数实现的。公主的模型输入尺寸为[640, 640]。根据官方提供的思想resize的时候需要保持原始图片的长宽比。因此需要首先计算与所需尺寸相差的最小ratio(即根据原始长度长,宽较长一边计算出的ratio),将图片resize之后,剩下的空隙用灰色来填充。公主输入图片原始尺寸为[512, 555, 3],转换之后为[640, 640, 3],如下图所示:
- 将图像转为RGB格式,并增加一维以符合输入尺寸,通过以下命令实现
image = image.transpose((2, 0, 1)) image = np.expand_dims(image, 0)
- 调用onnx模型
- 可视化输出结果,输出是个二维n*7数组,n代表检测结果数,每一条结果的7个值分别代表:[batch_id, bbox左上角横坐标,bbox左上角纵坐标,bbox右下角横坐标,bbox右下角纵坐标,classIndex,置信度]。这里可视化bbox时注意,得出的bbox坐标为resize之后的图像中坐标,需要根据resize时用到的ratio和padding数来还原出原始坐标,才可以在原始图像中显示出来。
python代码:
import cv2
import time
import requests
import random
import numpy as np
import onnxruntime as ort
import onnx
import torch
# import torchvision
# from PIL import Image
# from pathlib import Path
# from collections import OrderedDict, namedtuple
cuda = torch.cuda.is_available()
w = "bestE2E.onnx" # 模型名称
# 判断模型是否有效,这步可以省略
onnx_model = onnx.load(w)
try:
onnx.checker.check_model(onnx_model)
except Exception:
print("incorrect model")
exit()
else:
print("correct model")
# 创建session
providers = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider']
session = ort.InferenceSession(w, providers=providers)
# Resize原始图像,预处理
def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleup=True, stride=32):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
if not scaleup: # only scale down, do not scale up (for better val mAP)
r = min(r, 1.0)
# Compute padding
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
dw /= 2 # divide padding into 2 sides
dh /= 2
print(shape[::-1])
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im, r, (dw, dh)
# 类别名称,根据需要自己修改
names = ['bubbles']
colors = {name: [random.randint(0, 255) for _ in range(3)] for i, name in enumerate(names)}
# 读入待检测图像
img_path = r"D:/YOLOV7/img/test.bmp"
img = cv2.imread(img_path)
# BGR to RGB,并增加一维
image = img.copy()
image, ratio, dwdh = letterbox(image, auto=False)
image = image.transpose((2, 0, 1))
image = np.expand_dims(image, 0)
image = np.ascontiguousarray(image)
# 归一化
im = image.astype(np.float32)
im /= 255
outname = [i.name for i in session.get_outputs()]
inname = [i.name for i in session.get_inputs()]
# 调用模型得出结果,并记录时间
inp = {inname[0]: im}
t1 = time.time()
outputs = session.run(outname, inp)[0]
print('inference time :%.4f' % (time.time() - t1))
ori_images = [img.copy()]
# 可视化结果
for i, (batch_id, x0, y0, x1, y1, cls_id, score) in enumerate(outputs):
image = ori_images[int(batch_id)]
box = np.array([x0, y0, x1, y1])
box -= np.array(dwdh * 2)
box /= ratio
box = box.round().astype(np.int32).tolist()
cls_id = int(cls_id)
score = round(float(score), 3)
name = names[cls_id]
color = colors[name]
name += ' ' + str(score)
cv2.rectangle(image, box[:2], box[2:], color, 2)
cv2.putText(image, name, (box[0], box[1] - 2), cv2.FONT_HERSHEY_SIMPLEX, 0.75, [225, 255, 255], thickness=2)
cv2.imshow('dddd', ori_images[0])
cv2.waitKey(0)
cv2.destroyAllWindows()
结果显示:

二,C# 版
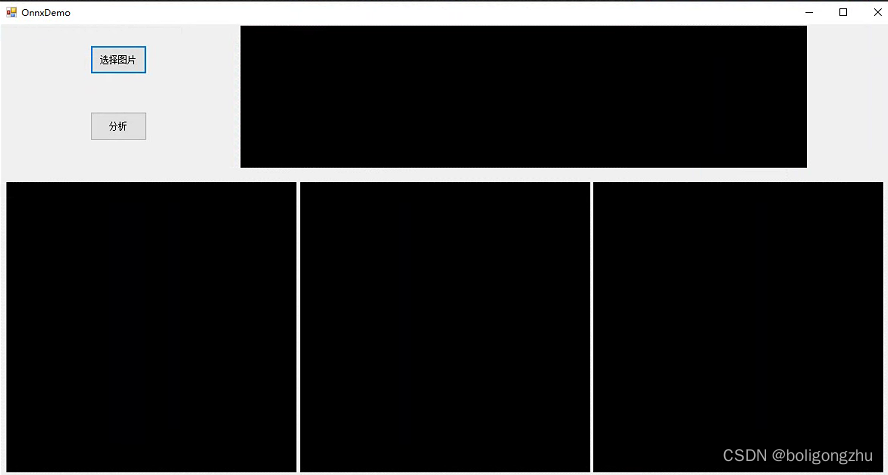
公主做的demo界面如下:
扫描二维码关注公众号,回复:
14661615 查看本文章

步骤与python版一模一样,公主一句一句翻译过来的。中间遇到过很多坑,但事情太多忘记一条一条记录了,有问题随时欢迎评论区讨论,完整代码如下:
private void btn_analyze_Click(object sender, EventArgs e){
// 原始图像切割为3份,分成1024*1024
Mat img_img = this.img_mat;
Mat[] subImg = new Mat[3];
int w = Width / 3;
subImg[0] = img_img[0, 1024, startX, startX + w];
subImg[1] = img_img[0, 1024, startX + w, startX + w * 2];
subImg[2] = img_img[0, 1024, startX + w * 2, startX + rect.Width - edge * 2];
// pictureBox对象“们”存为数组
PictureBox[] picbox = new PictureBox[3] { this.pictureBox2, this.pictureBox3, this.pictureBox4 };
for(int i = 0; i < 3; i++)
{
int top = 0, left = 0;
double ratio = 0.0;
// after resize and padding
Mat img_copy = new Mat();
subImg[i].CopyTo(img_copy);
// letterbox实现Resize图像
Mat imageRgb = letterbox(img_copy, imgSize, out top, out left, out ratio);
// 将Mat格式图像转化为onnx模型需要的tensor张量
Bitmap imageBmp = BitmapConverter.ToBitmap(imageRgb);
Tensor<float> input = FastToOnnxTensor(imageBmp);
var inputs = new List<NamedOnnxValue>
{
NamedOnnxValue.CreateFromTensor("images", input)
};
// 调用onnx模型,保存结果
IDisposableReadOnlyCollection<DisposableNamedOnnxValue> results = session.Run(inputs);
// 图像后处理,并可视化
var resultsArray = results.ToArray()[0];
Tensor<float> tensors = resultsArray.AsTensor<float>();
var array = tensors.ToArray();
Mat newMat = new Mat();
Cv2.CvtColor(subImg[i], newMat, ColorConversionCodes.GRAY2RGB);
if (array.Length > 0)
{
for (int j = 0; j < tensors.Dimensions[0]; j++)
{
int startIndex = j * tensors.Dimensions[1];
Scalar color = new Scalar(127, 255, 0); // 灰度颜色
int lefttop_x = (int)((array[startIndex + 1] - left) / ratio);
int lefttop_y = (int)((array[startIndex + 2] - top) / ratio);
int rightbottom_x = (int)((array[startIndex + 3] - left) / ratio);
int rightbottom_y = (int)((array[startIndex + 4] - top) / ratio);
Cv2.Rectangle(newMat, new OpenCvSharp.Point(lefttop_x, lefttop_y),
new OpenCvSharp.Point(rightbottom_x, rightbottom_y),
color, 2);
Cv2.PutText(newMat, LabelMap.Labels[(int)array[startIndex + 5]],
new OpenCvSharp.Point(lefttop_x, lefttop_y - 5),
HersheyFonts.HersheySimplex, 0.75, color, 2);
}
}
picbox[i].Image = BitmapConverter.ToBitmap(newMat);
}
}
// Load表格时创建session
private void OnnxDemo_Load(object sender, EventArgs e){
options = SessionOptions.MakeSessionOptionWithCudaProvider(0);
session = new InferenceSession(path, options);
}
// letterbox预处理图像
private Mat letterbox(Mat subImg, int newSize, out int top, out int left, out double ratio)
{
int width = subImg.Cols;
int height = subImg.Rows;
ratio = Math.Min(((double)newSize / (double)width), ((double)newSize / (double)height));
int[] new_unpad = { (int)(Math.Round(height * ratio)), (int)(Math.Round(width * ratio)) };
int[] dwh = { (newSize - new_unpad[0]) / 2, (newSize - new_unpad[1]) / 2 };
if (dwh != new_unpad)
{
Cv2.Resize(subImg, subImg, new OpenCvSharp.Size(new_unpad[1], new_unpad[0]));
}
top = (int)(Math.Round(dwh[0] - 0.1));
int bottom = newSize - top - new_unpad[0];
left = (int)(Math.Round(dwh[1] - 0.1));
int right = newSize - left - new_unpad[1];
Cv2.CopyMakeBorder(subImg, subImg, top, bottom, left, right, BorderTypes.Constant, Scalar.Gray);
Cv2.CvtColor(subImg, subImg, ColorConversionCodes.GRAY2RGB); //Gray to RGB
return subImg;
}
// Bitmap格式转化为Tensor张量
public Tensor<float> FastToOnnxTensor(Bitmap source)
{
var floatArray = new float[source.Width * source.Height * 3];
var bitmap_data = source.LockBits(new Rectangle(0, 0, source.Width, source.Height), ImageLockMode.ReadOnly, System.Drawing.Imaging.PixelFormat.Format24bppRgb);
var bitmap_bytes = new byte[Math.Abs(bitmap_data.Stride) * source.Height];
Marshal.Copy(bitmap_data.Scan0, bitmap_bytes, 0, bitmap_bytes.Length);
int total_pixels_count = source.Width * source.Height;
Parallel.For(0, total_pixels_count, (p_idx, state) =>
{
var g_idx = p_idx + total_pixels_count;
var b_idx = p_idx + total_pixels_count * 2;
floatArray[p_idx] = bitmap_bytes[p_idx * 3] / 255f;//R
floatArray[g_idx] = bitmap_bytes[p_idx * 3 + 1] / 255f;//G
floatArray[b_idx] = bitmap_bytes[p_idx * 3 + 2] / 255f;//B
});
source.UnlockBits(bitmap_data);
return new DenseTensor<float>(new Memory<float>(floatArray), new int[] { 1, 3, source.Height, source.Width });
}
静态变量:
// 静态变量,用来保存类别名称
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
namespace OnnxDemo
{
public static class LabelMap
{
static LabelMap()
{
Labels = new string[]
{
"bubble"
};
}
public static string[] Labels { set; get; }
}
}运行结果:

Nice~Nice~Nice~~~公主对结果还是灰常满意哒!!!