论文标题:Automatic Vehicle Tracking With Roadside LiDAR Data for the Connected-Vehicles System
发表会议/期刊:IEEE Intelligent Systems 2019
问题:网联无人车可以通过无线通信获得其他合作网联无人车的实时状态,但目前实际应用中道路上的网联无人车是非常有限,无人车并不能与未联网的车辆进行合作来获得更全面的交通环境情况。为了获得CV的充分效益,需要开发一种方法来收集未联网的道路使用者的高分辨率感知数据。
虽然网联车辆和未联网的车辆之间没有通信,但路边基础设施的传感器可以收集实时交通信息,并将其广播给道路上的用户。
1 数据处理方法
基于路边设施LiDAR传感器收集的点云数据,开发了一个自动车辆跟踪系统,利用路边设施感知周围车辆或其他道路使用者的高分辨率状态,并通过DSRC将信息广播给网联车辆。LiDAR数据处理程序包含五个主要部分:背景过滤、物体聚类、车辆识别、车道识别和车辆跟踪。
1.1 背景过滤
背景点与运动物体无关,可能会对目标识别/跟踪的准确性造成影响,因此需要将它们从数据分析中排除。
采用一种无监督的机器学习算法,3D密度统计过滤(3D-DSF),来进行背景过滤,
1)帧聚合:在5或10分钟内收集的LiDAR数据根据其局部坐标被聚合在一起,用于增加空间中的背景点。
2)点密度统计:空间可以被划分为边长相等的小立方体,并计算每个立方体中点的数量。
3)背景矩阵(BM)生成:通过一个预先定义的点的数量的阈值,来确定立方体中的点是否属于背景,代表背景的立方体的位置将被存储在一个三维BM中。
4) 每一帧的LiDAR点都与生成的BM进行比较,任何在BM中发现的点都被排除在空间之外。
1.2 物体聚类
采用基于密度的带噪声的空间聚类(DBSCAN) 方法,将属于一个物体的点根据其内部关系将其分为一组。DBSCAN不需要知道道路上物体的数量,由两个参数决定聚类的性能:
a. 搜索半径(ɛ):根据LiDAR传感器的机械结构选择的;
b. 极小点(MinPts)值:根据从搜索椭球体收集到的最大点数估计的。
1.3 车辆识别
为了将车辆与其他道路使用者区分开来,基于物体的6个特征采用基于决策树的方法 RF 来对物体进行分类,区分行人、自行车和不同类别的车辆。6个特征包括物体的长度和高度、高度和长度之间的差异、物体高度曲线、物体与LiDAR传感器之间的距离以及点的数量。
1.4 车道识别
开发了一种基于网格的聚类(RGBC)方法用于车道识别。 RGBC包含三个主要部分:帧聚合、分层分割和贪婪算法。
1. 帧聚合:与3D密度统计过滤(3D-DSF)算法中的帧聚合类似,多个不同物体根据其坐标被聚合在一个空间中。
2. 分层分割:识别空间中的道路(R)区域。
1) 根据基于统计信息网格(STING)规则将整个空间划分为边长相等的正方形,第1层的正方形边长可以很大(如20米);对于正方形内的点,
- 没有车辆点,那么就被确定为非道路(NR);
- 有车辆点,那么它就被划分为多个边长更小的正方形(如10米),进入第2层。
再次判断正方形区域内是否有车辆点,以确定是否需要再次划分一个子层。以此类推,理想情况下,最终空间将被划分为边长较小的多个方块(如0.1米),其中包含车辆点的方块就属于道路R区域。
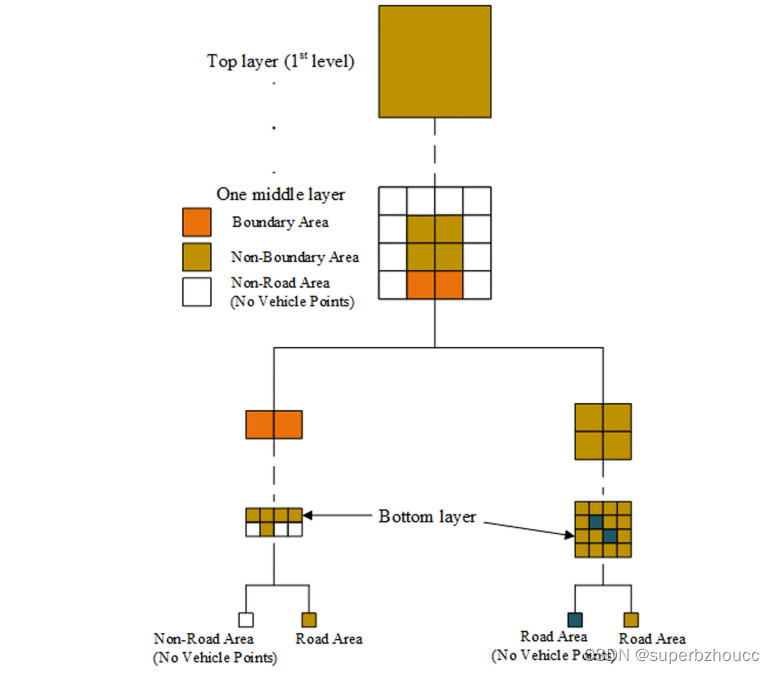
2)由于车辆点不能覆盖整个车道(车道比车辆的宽度要宽),那么车道上的很多区域可能会被识别为非道路区域。为了解决这个问题,
a. 将R区域划分为边界区域(车道上靠近车道边界的模糊区域)和非边界区域(车辆点的数量低于某个特定的阈值,视为没有车辆点的方块区域)。
b. 同样遵循基于统计信息网格(STING)规则,分别将边界区域和非边界区域划分为子方块来进一步搜索道路R区域,直到到达底层。(对于非边界区域,尽管它也被分割成子方块,但不考虑方块中点的数量。)
严格来说,其并不是真正的道路边界,而是车辆轨迹的边界(BVT)。为了正确识别车辆占用的车道,涉及到一个投票程序:当一些点不属于BVT时,这些点被投票到NR区域;在BVT范围内的点被投票到R区域。如果NR的票数高于R的票数,那么车辆就在道路边界之外(车辆不在道路上);否则,车辆在道路上。
3. 贪婪算法:经过分层分割,可以提取道路边界;采用贪婪算法来搜索道路边界。
1)从在道路边界上最接近LiDAR传感器(路边设施)的方格(CS)开始,其角点(x,y)和LiDAR的位置(0,0)的连线作为一条扫描线,以一定的间隔距离水平移动扫描线使其经过空间中的所有方格,并计算出扫描线在每个方格中所经过的点数,得到每个方格中的点数随方格和最接近LiDAR的方格之间的距离分布。
两条车道示例:
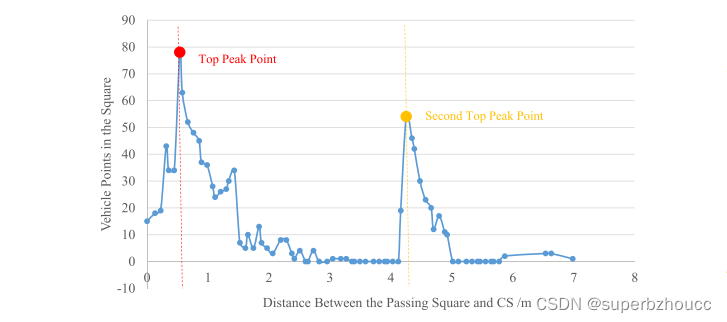
贪婪算法沿着距离搜索每个峰值点,并选出了前两个峰值点,最终选择的峰值点的数量等于道路上车道的数量(2)。搜索空间被缩小到两个峰值点之间的区域,车道边界位于这两个峰值点之间的某处。理想情况下,没有车辆点的方格可以被确定为车道边界。
没有车辆点的方格与最接近LiDAR的方格(CS)之间的距离的均值:
其中,AD是平均距离, N n N_n Nn是沿扫描线有n个车辆点的方格数量(理想情况下, n = 0 n = 0 n=0),D是方格和CS之间的距离。

对于每一个方格,如果它与CS之间的距离小于AD,则该方格位于第1车道(靠近LiDAR)。否则,该方格属于第2车道。通过对属于同一车道的所有方格进行分组,可以确定车道位置。
1.5 车辆跟踪
采用最简单的目标跟踪方法是全局最近邻(GNN)算法,通过识别不同帧上的同一车辆的点簇来进行车辆跟踪,具体来说,就是识别当前帧中与上一帧中的车辆距离最小的同一车辆。
2 实验
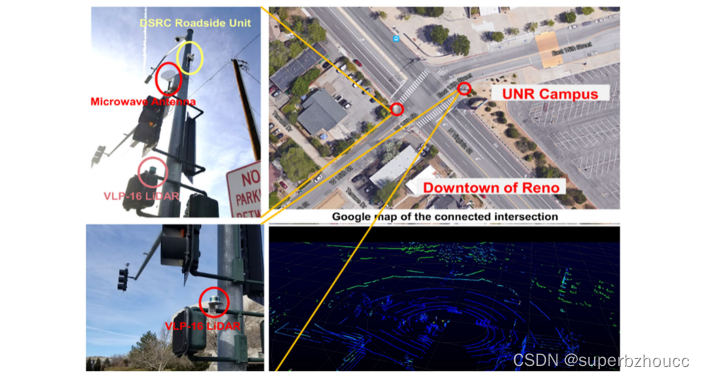
使用现场收集的数据对车辆跟踪算法的准确性进行了评估。开发了一个真实世界的操作系统,该系统由路边激光雷达、边缘计算机、专用短程通信(DSRC)路边单元(RSU)、Wi-Fi路由器和DSRC车载单元(OBU)以及图形用户界面组成。
3 总结
提出了一种LiDAR数据处理过程,通过考虑车辆检测和车道识别设计了一个自动车辆跟踪系统,从路边设施LiDAR传感器中提取所有车辆的高精度高分辨率的轨迹,该过程包括背景过滤、DBSCAN聚类、RF分类、RGBC车道识别和GNN跟踪等方法。
1)背景过滤:通过应用基于统计学的背景过滤方法,去除从路面或建筑物反射的激光点;
2)聚类:采用基于密度的有噪声的空间聚类(DBSCAN)方法为激光点生成聚类;
3)分类:采用随机森林(RF)分类方法,为不同的物体(如车辆和行人)生成不同的类别标签;
4)跟踪:采用全局最近邻(GNN)算法,在连续数据帧中识别同一物体。
局限:
1)所提出的车道识别方法,基于网格的聚类(RGBC)方法,要求输入帧应至少有一辆车出现在外侧车道上;
2)RGBC假设变道车辆的比例远远低于穿行车辆的比例。