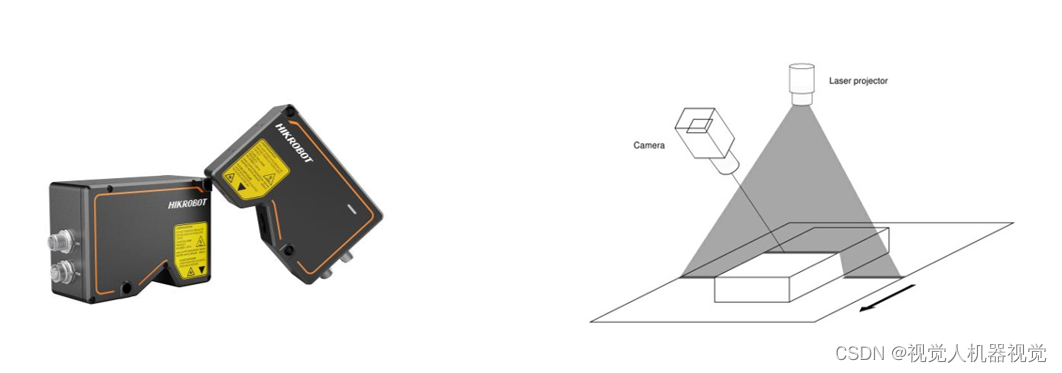
- 激光三角测量法
3D激光轮廓仪是基于激光三角测量法(laser triangulation)来重建三维场景。向被测物表面投射激光平面(光片,sheet of light) ,通过使用CMOS相机接收其反射光的变化,可以非接触方式测量高度、高度差、宽度等轮廓(截面形状)。通过被测物和轮廓仪之间的相对运动,对连续获取的轮廓数据进行图像处理重构获得被测物的3D形状,实现高精度测量及检测。
2.轮廓仪数据流向及成像过程
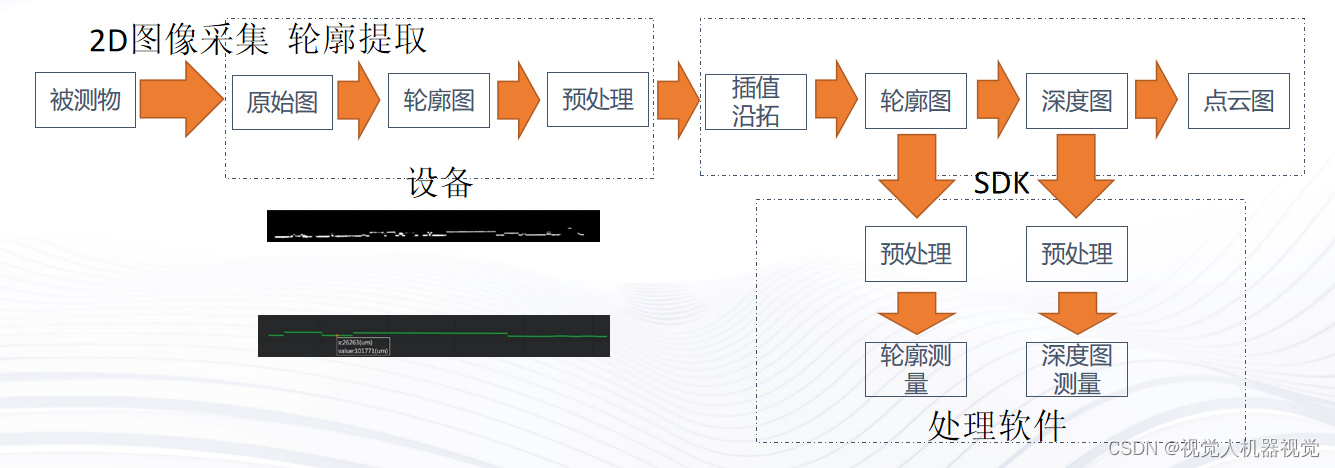
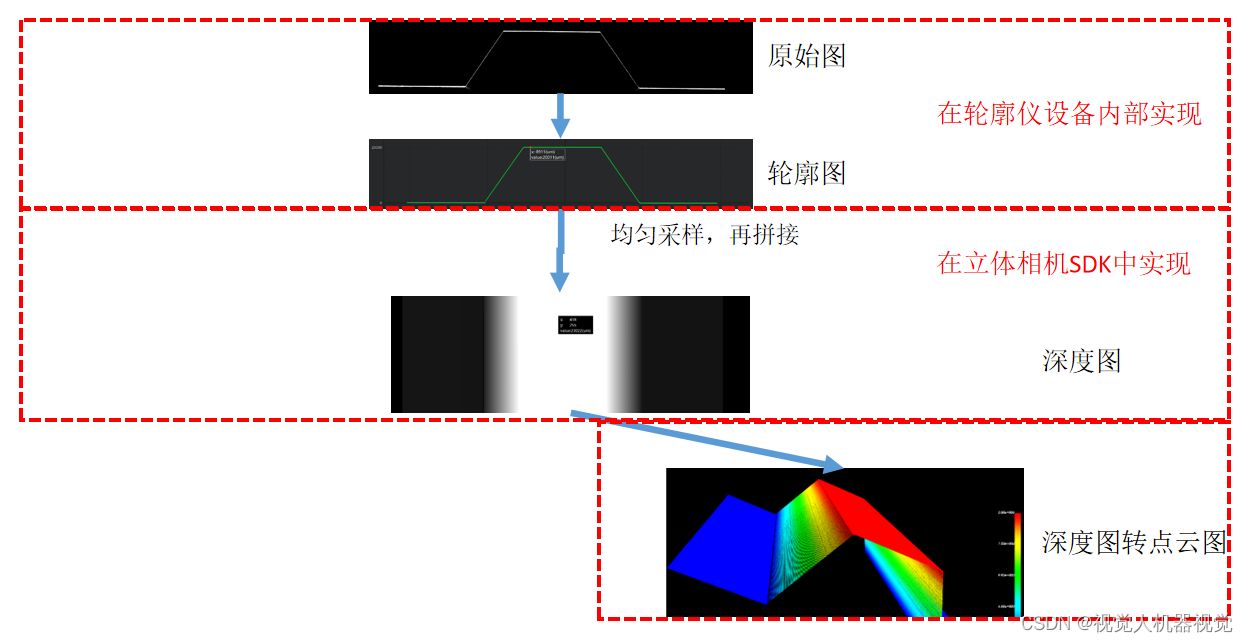
3.3D激光轮廓仪的成像过程
DP系列3D轮廓仪不依托于外部控制器,仅凭设备本身和配套SDK即可实现全部功能,设备支持原始图、轮廓图、深度图(点云图)、亮度图(chunk附加信息)的输出。
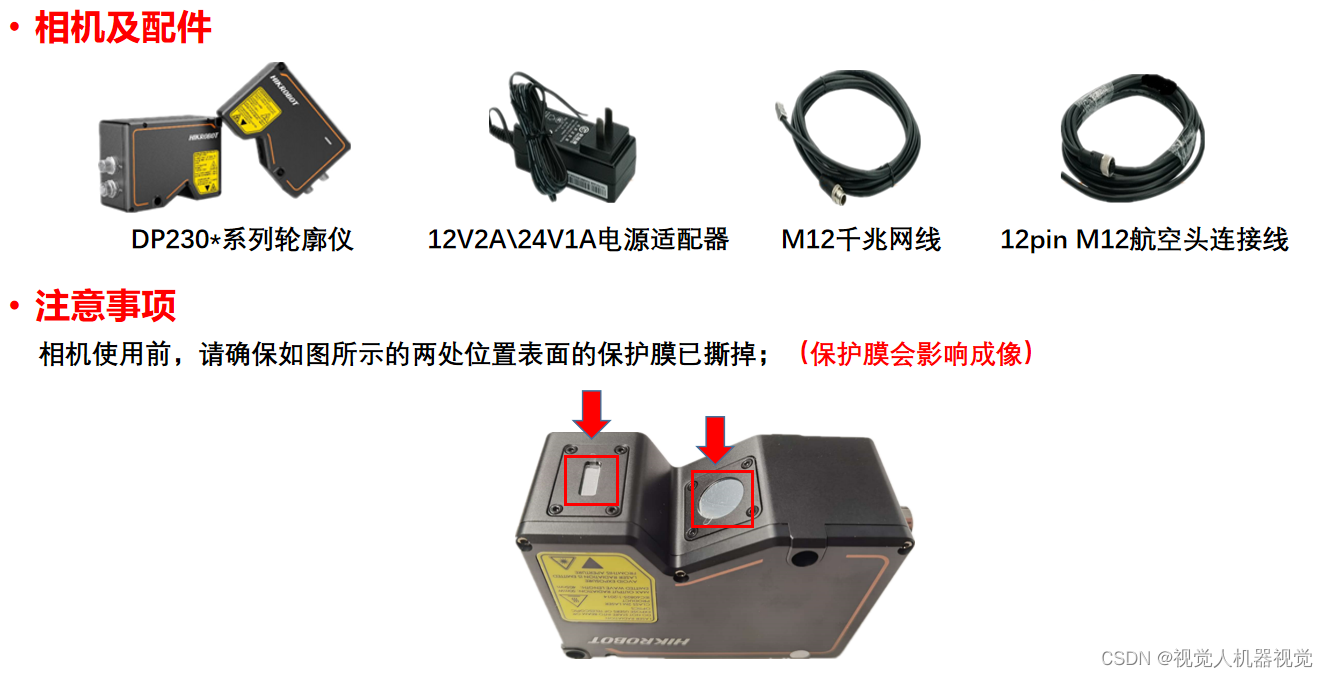
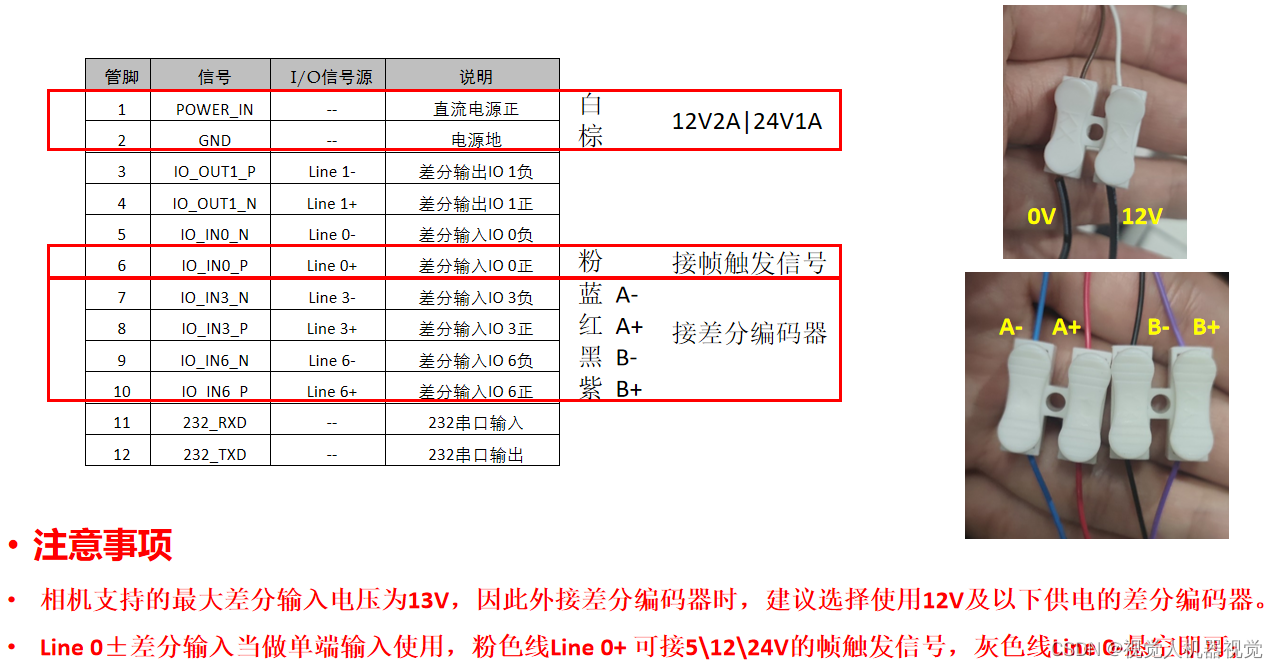
4.DP2305\07轮廓仪相机接线说明
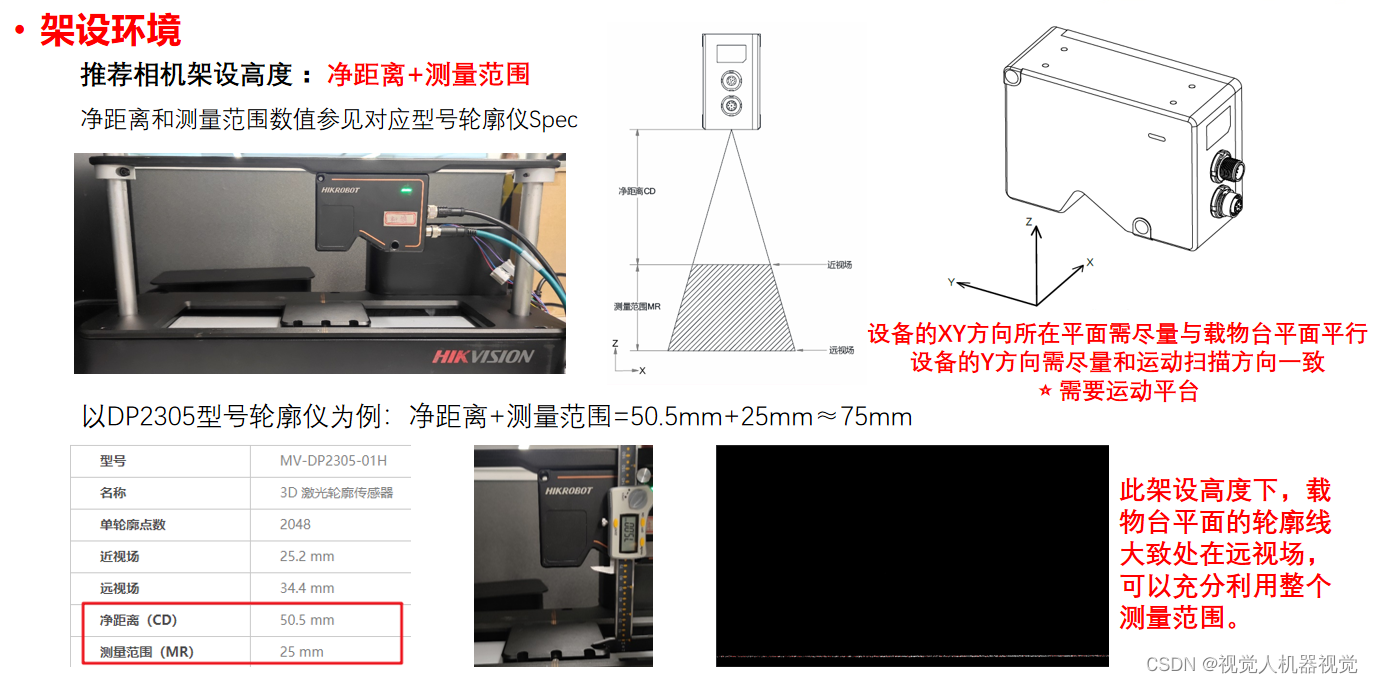
环境配置
关闭防火墙和杀毒软件(若不关闭,立体相机SDK的basic demo示例程序以及测量软件3DMS可能获取不到图像)
千兆网卡属性配置(开启巨帧、设置传输\接收缓冲区、速度与双工为最大值;关闭“电源节能”相关属性)
推荐使用独立显卡(VTK报错或者D3D渲染引擎初始化失败)
软件安装
机器视觉立体相机客户端 3DMVS(必须安装,用于3D图像效果调试) 软件下载路径:海康机器人官网-服务支持-下载中心-软件-3DMVS V2.0.2及以上版本
(以官网最新版本为准,必要时可联系总部技术支持渠道获取)
机器视觉应用软件 1、VM3D软件;2、3DMS测量软件(可选安装,用于3D测量;需配合对应型号加密狗使用)
软件获取方式:可联系总部技术支持渠道获取;或从2150FTP下载:
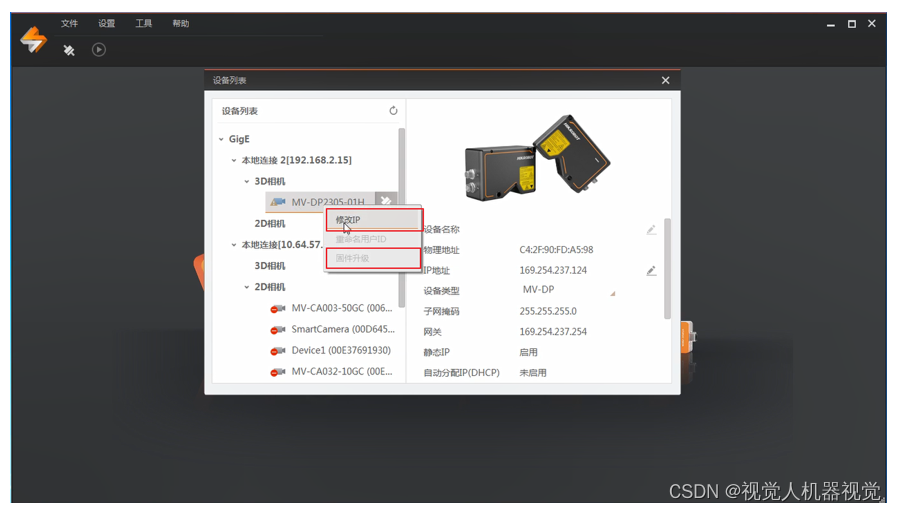
4.修改IP和固件升级
双击打开3DMVS客户端,可在设备列表中右键修改相机IP以及升级相机固件。
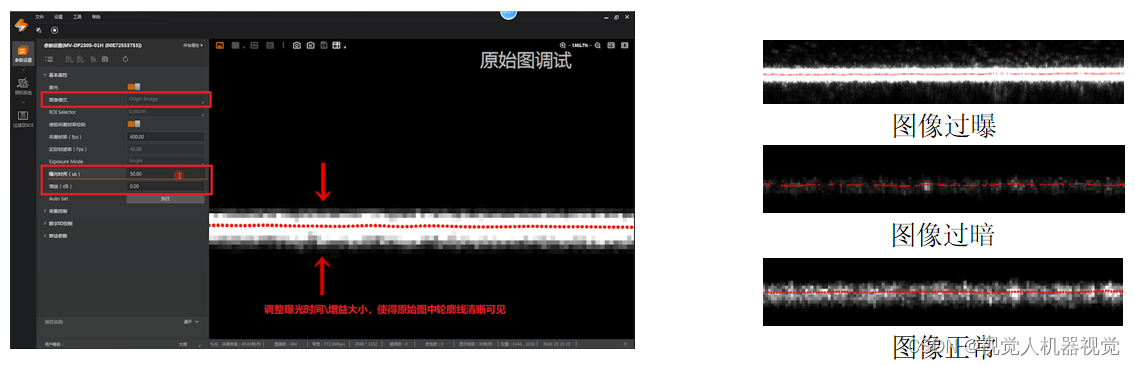
5.调节原始图的曝光时间\增益大小
在“基本属性”下的“图像模式”中,选择 Origin Image 原始图模式;点击开始取流,放大查看原始图中轮廓线的线条宽度;调节曝光时间\增益,使得原始图中被测物表面的轮廓线清晰可见。
6.调节原始图的ROI大小
在“基本属性”下的“ROI Selector”中,可选择Full\Middle\Small三种固定分辨率大小的ROI;也可自定义框选ROI大小;缩小ROI可提高相机的帧率,以及滤除ROI以外不必要的激光线。

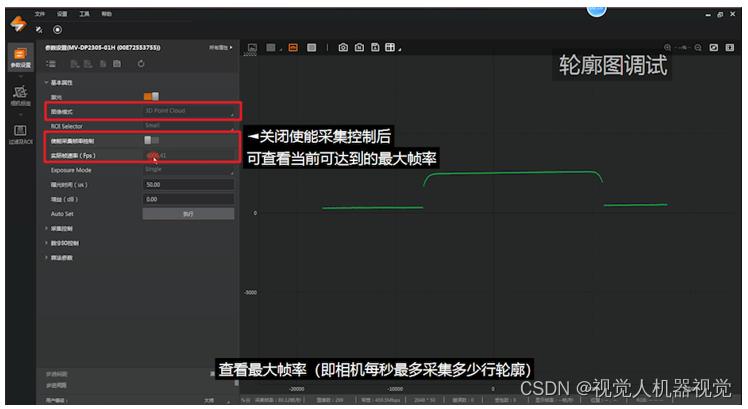
7.查看最大扫描帧率
原始图调试完毕后,将图像模式从原始图模式(Origin Image)切换至点云图模式(3D Point Cloud);点击开始取流,如图所示,可查看当前的轮廓图效果;关闭“使能采集帧率控制”后,可以查看当前点云图模式下的最大帧率(即相机每秒最多采集多少行轮廓);轮廓图也属于点云图,只不过只有一行轮廓数据。
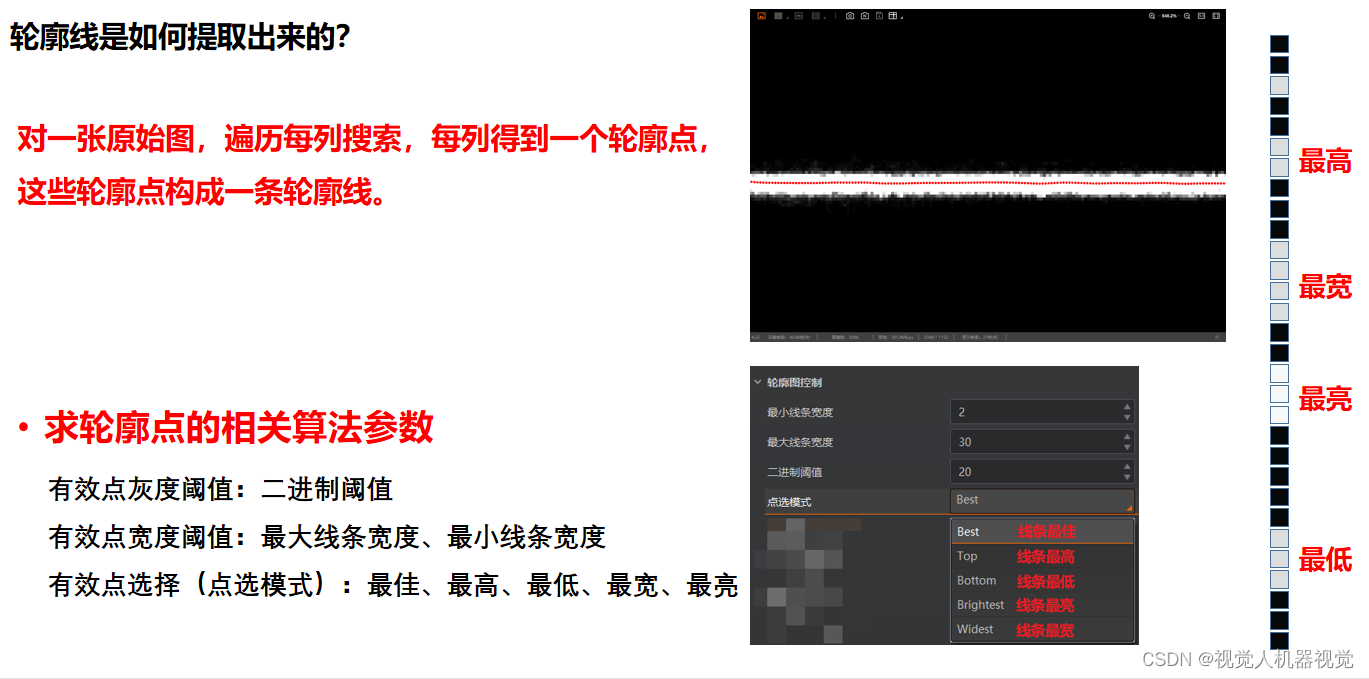
8.轮廓线是如何提取出来的?
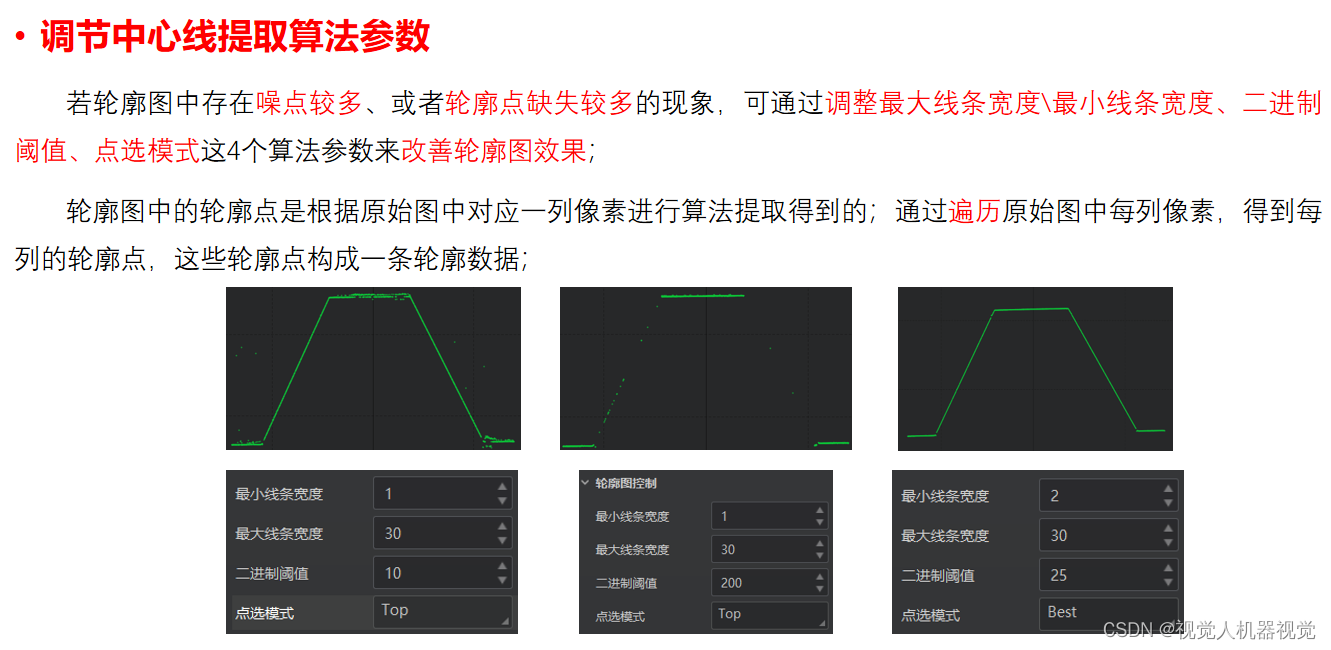
9.调节中心线提取算法参数
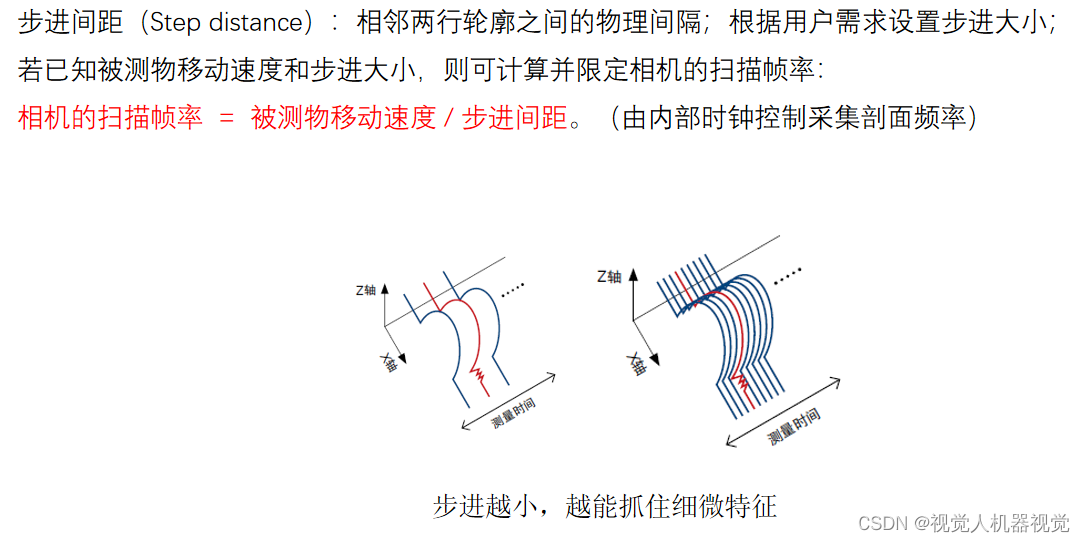
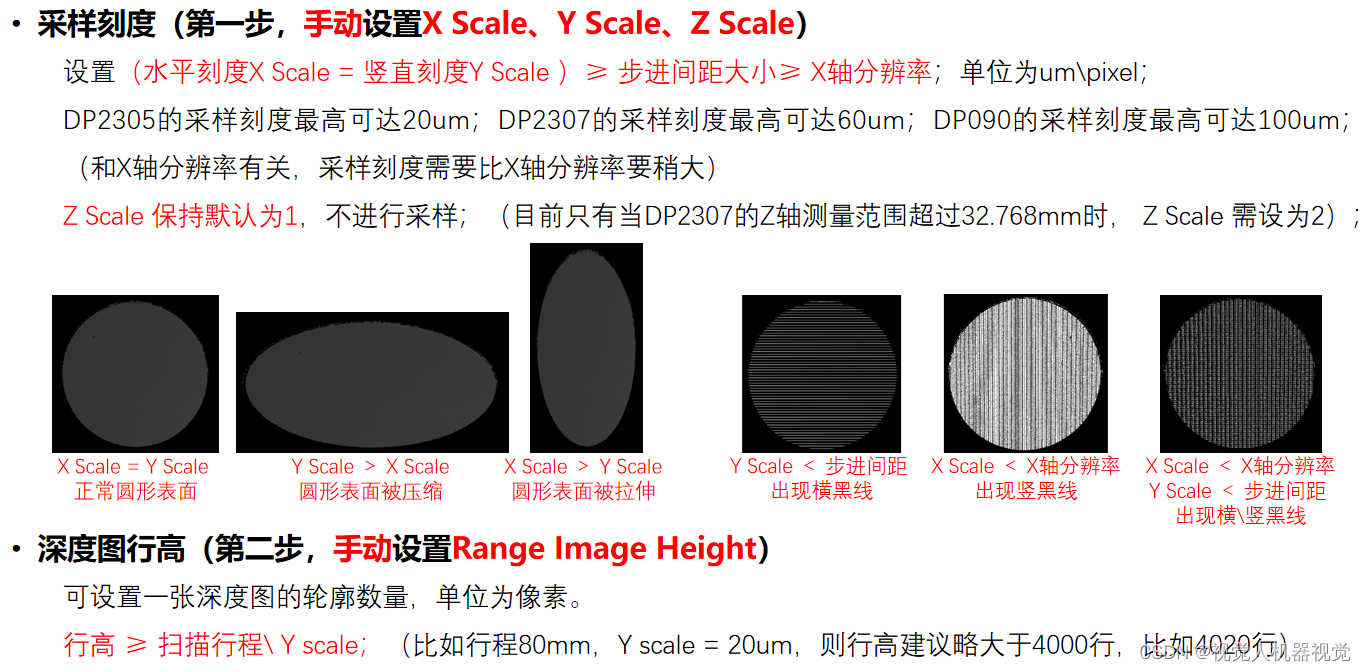
10.设置步进间距大小
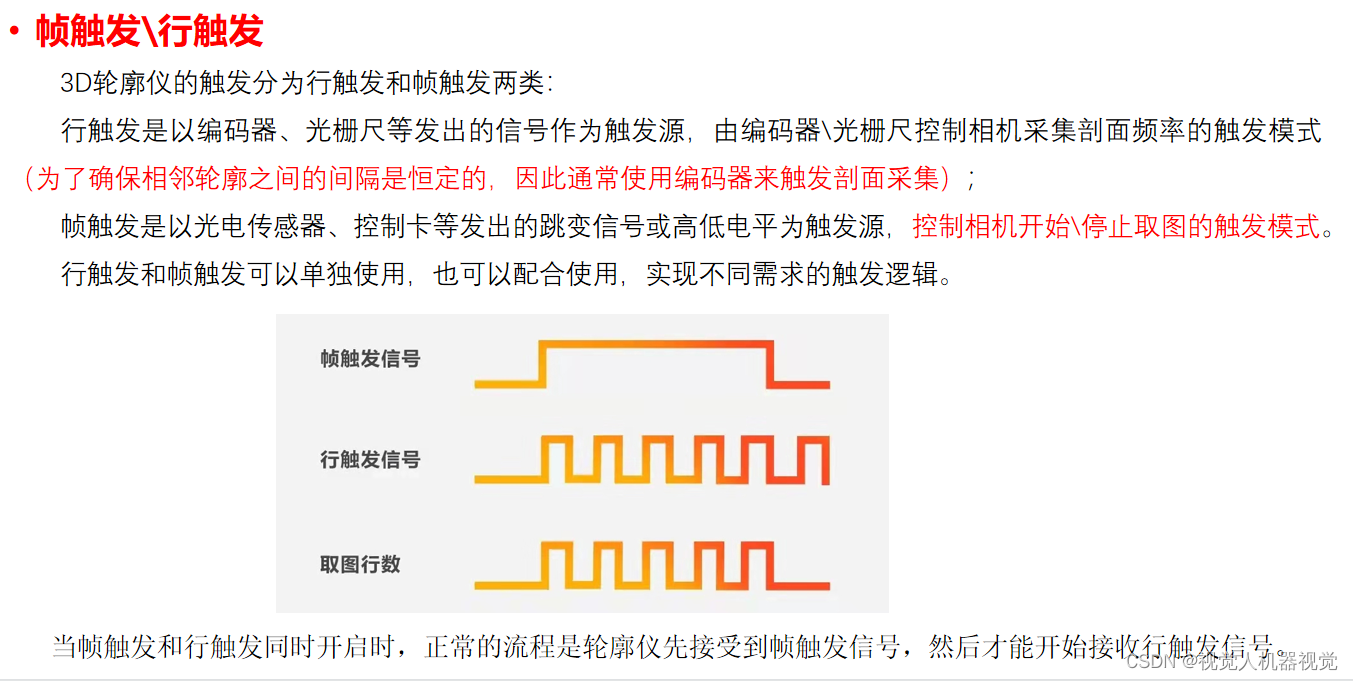
11.帧触发\行触发
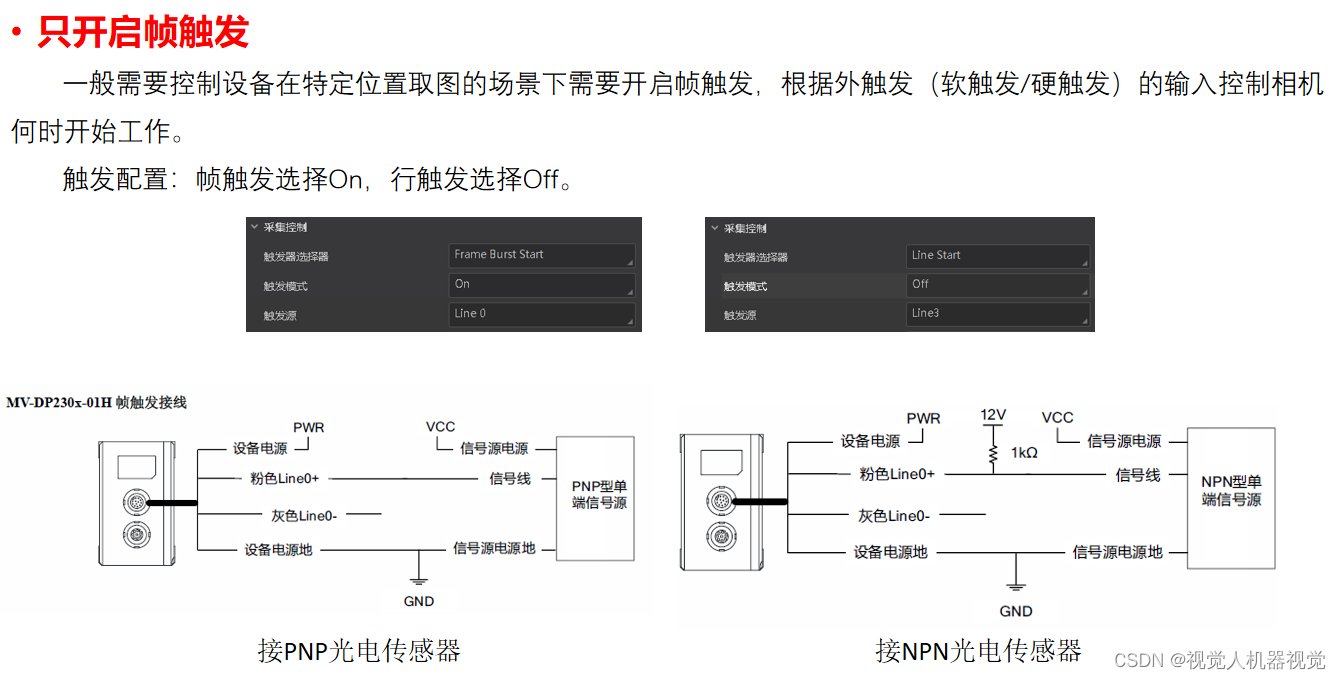
12.只开启帧触发
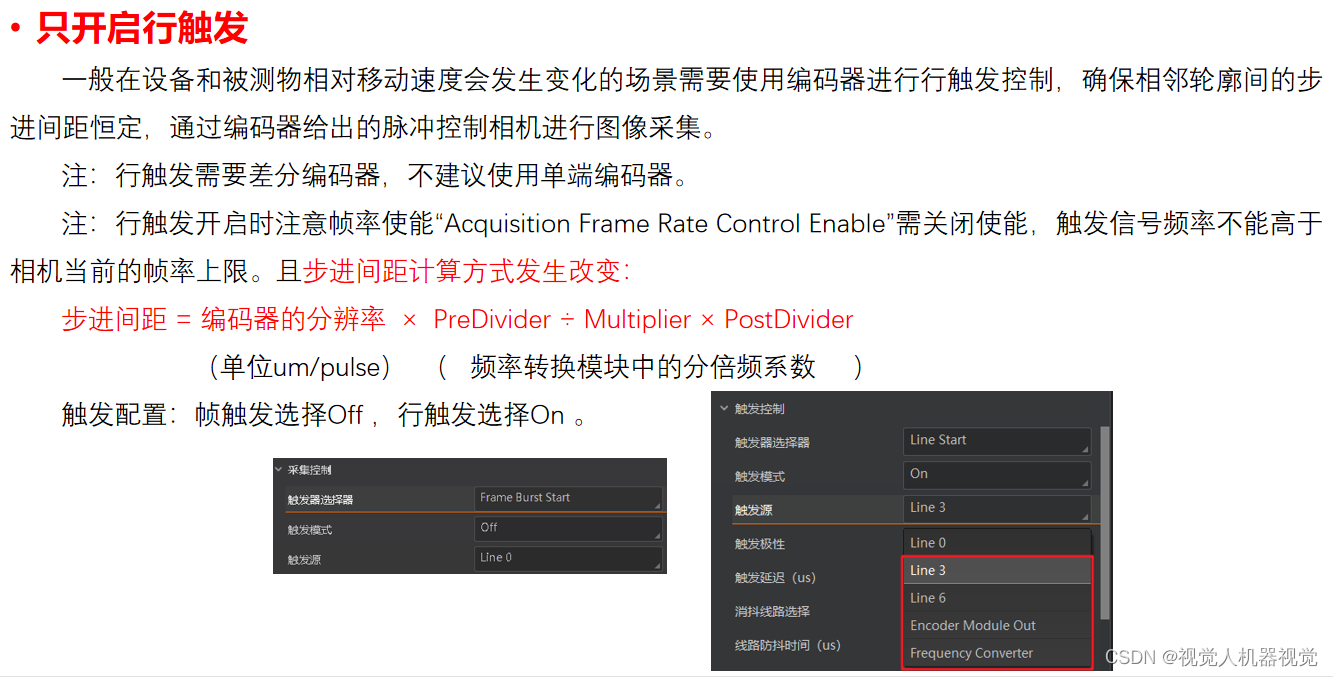
13.只开启行触发
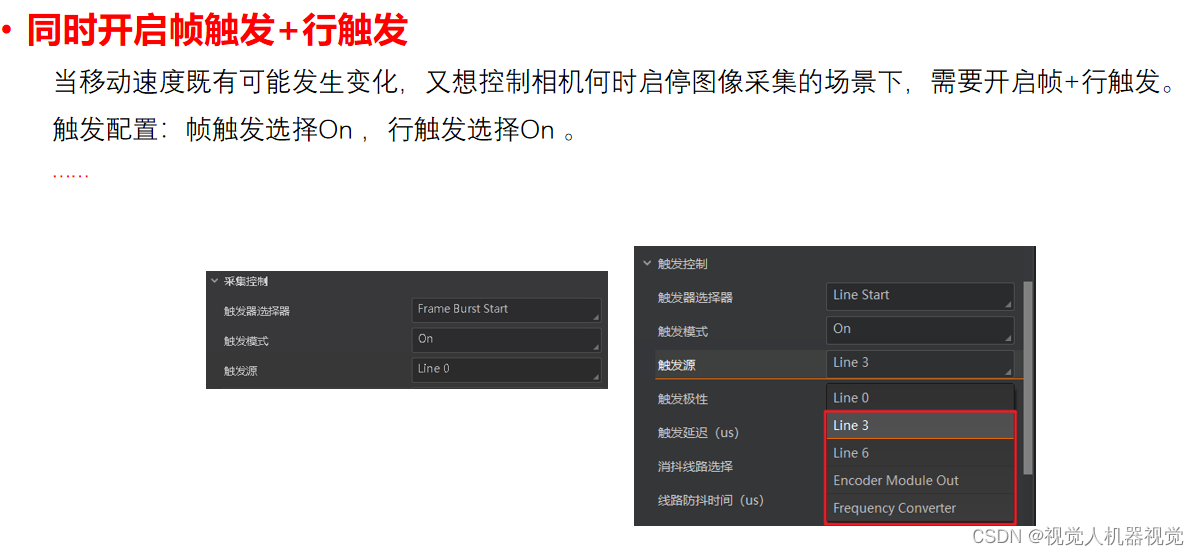
14.同时开启帧触发+行触发
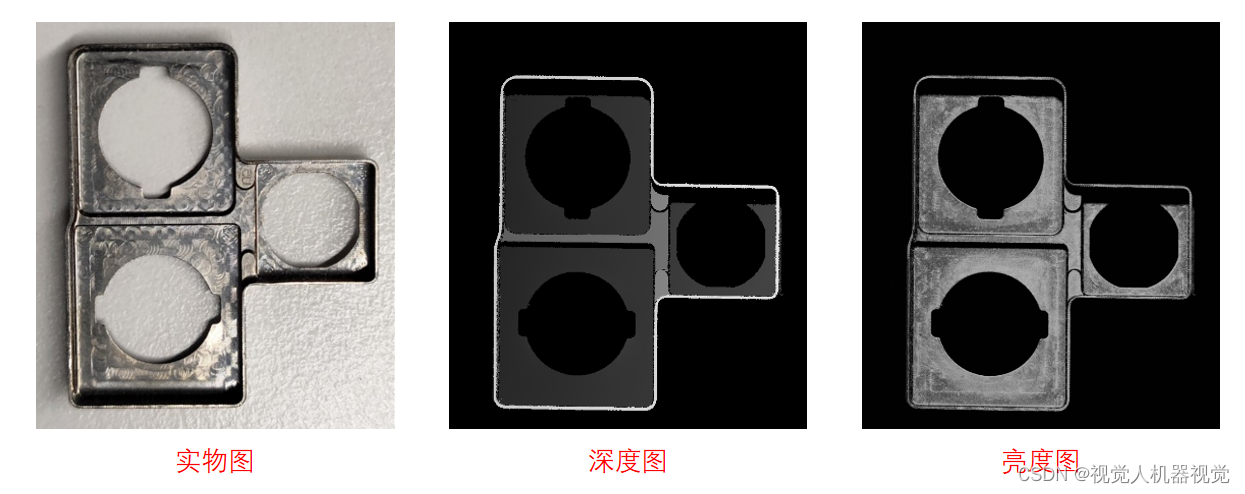
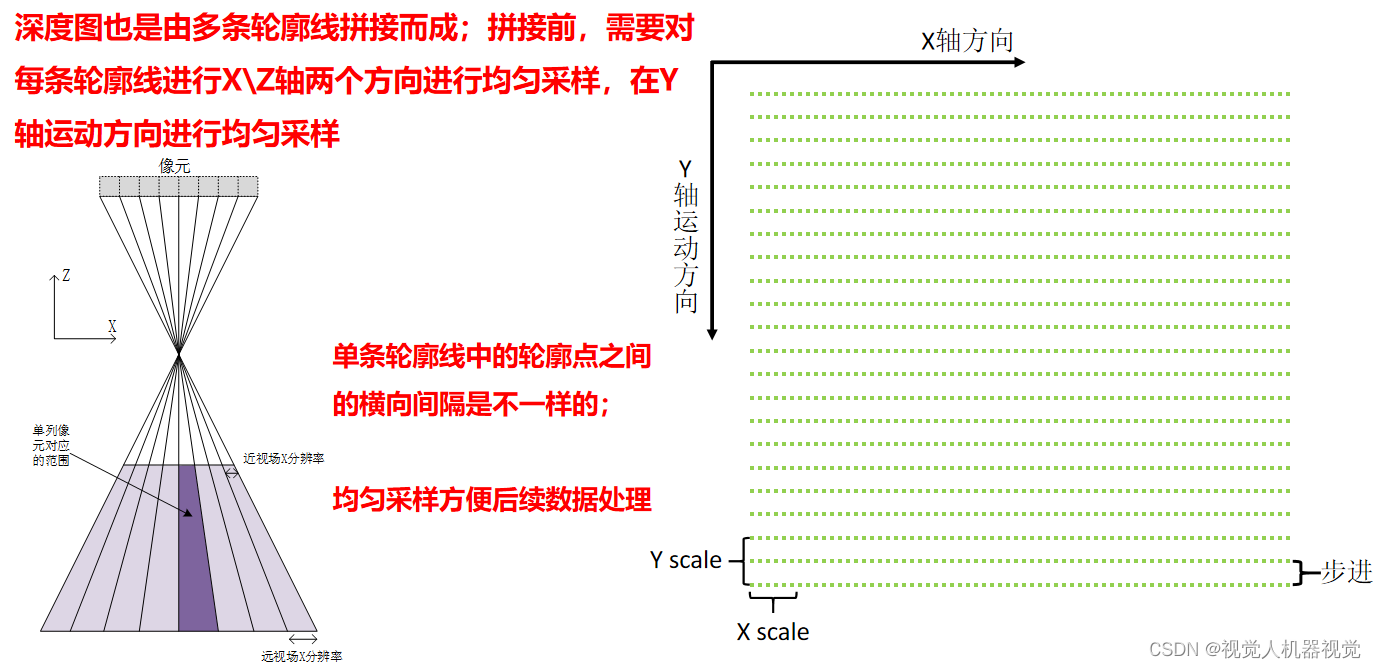
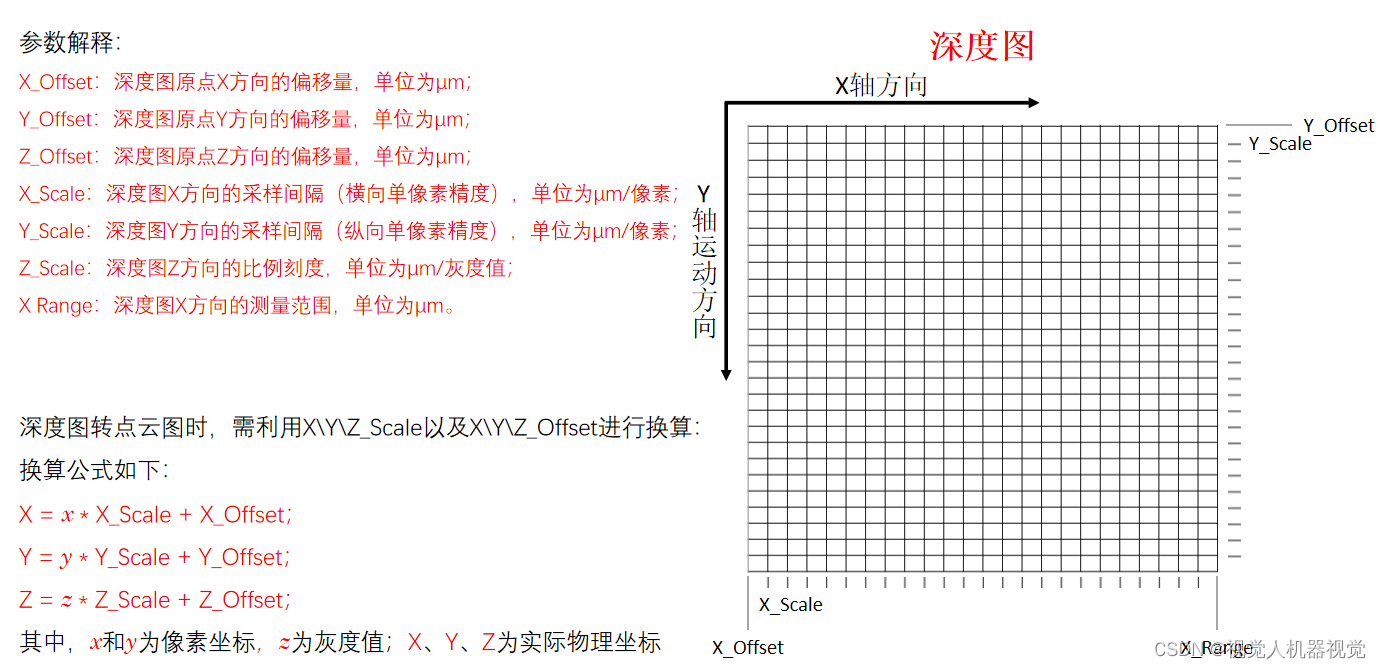
15.什么是深度图
深度图(3D range image),是一张2D灰度图像,深度图中每个像素的灰度值代表深度(高度)信息;
亮度图(intensity image),是一张2D灰度图像,亮度图中每个像素的灰度值代表亮度信息;
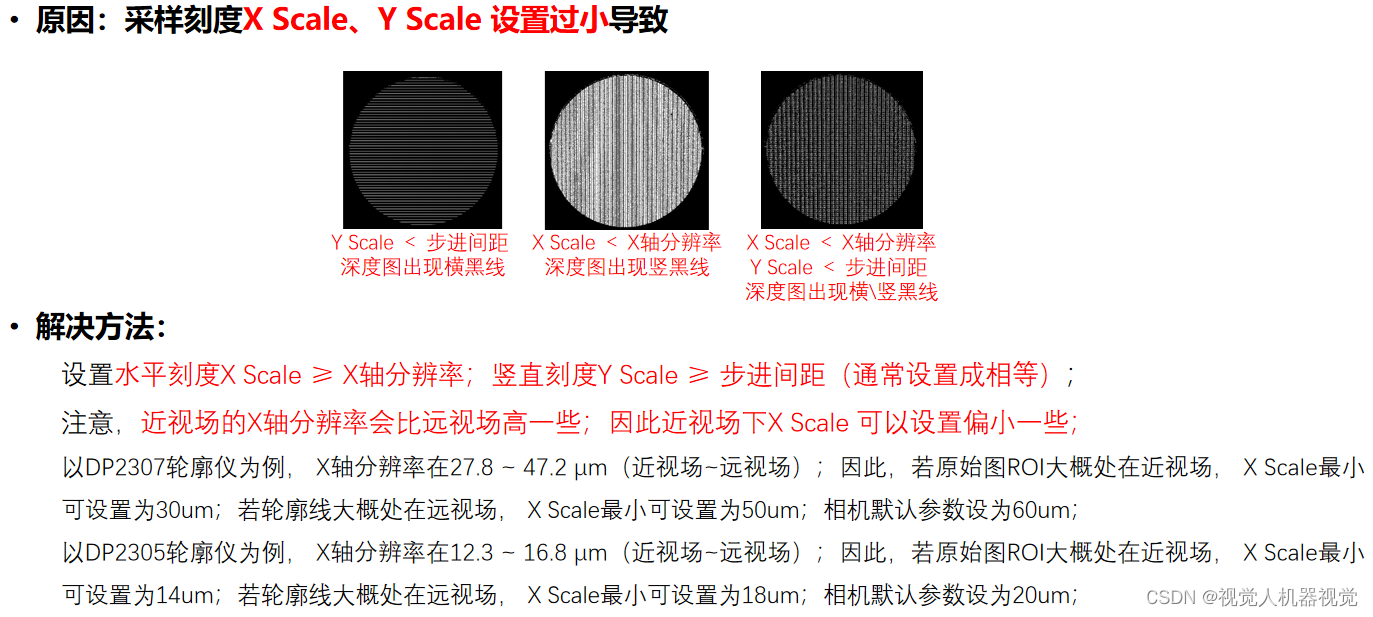
16.深度图中出现横\竖黑线是什么导致的?

海康3D轮廓仪调试详细步骤
猜你喜欢
转载自blog.csdn.net/weixin_44301520/article/details/129909258
今日推荐
周排行