利用VM虚拟机装载Ubuntu系统,并安装ROS
本文为希望免除装双系统的麻烦,从而装载Ubuntu的朋友们提供了一条新的思路。由于笔者安装Ubuntu的主要目的是使用ROS,从而希望实现对无人机等产品的控制,所以本文的介绍一直会持续到安装完成ROS并初次打开小乌龟(turtle)。因为全部介绍太过繁杂,本文内容除了详细说明一些容易出错的细节之外,同时提供可以查询资料的地方,也向那些无私提供详细教程的人表示感谢。笔者强烈推荐先阅读下参考文献再看本文,或者直接仅阅读参考文献,在衔接部分查看本文。
内容提要
- VM虚拟机的安装
- Ubuntu系统在VM虚拟机上的装载
- ROS在Ubuntu上的安装
- ROS系统测试
按照笔者的理解,本文安装ROS的技术路线是先安装虚拟机,在虚拟机上使用光盘镜像的方式装载Ubuntu系统,之后在虚拟机上安装ROS系统即可。这就是大致的思路。
VM虚拟机的安装
VMware Workstations是微软的成熟产品,直接在网络上搜索资源下载安装就可。
Ubuntu系统安装
1.Ubuntu镜像下载
首先需要在Ubuntu官网上下载Ubuntu系统的镜像。注意:如果你希望安装最新的Ubuntu系统,在官网上安装Ubuntu16系列即可,如果你今后希望进一步安装ROS系统,请一定安装Ubuntu14系列,这一点是由于ROS对Ubuntu的支持的限制。
下面是下载地址:Ubuntu14 Ubuntu16
2.装系统前的准备
安装好的VM界面应该是如下的

这里点击创建新的虚拟机,根据提示进行安装,这里会进行内存的分配,选择虚拟机的存储位置等。注意在提示安装系统时选择稍后安装。其他的基本是默认选项。
3.安装系统
做好准备后请先不要开机,这就跟我们真正安装系统一样,我们需要先放入系统光盘。
在虚拟机设置中的DVD选项里面把连接改成使用ISO镜像文件,如下图
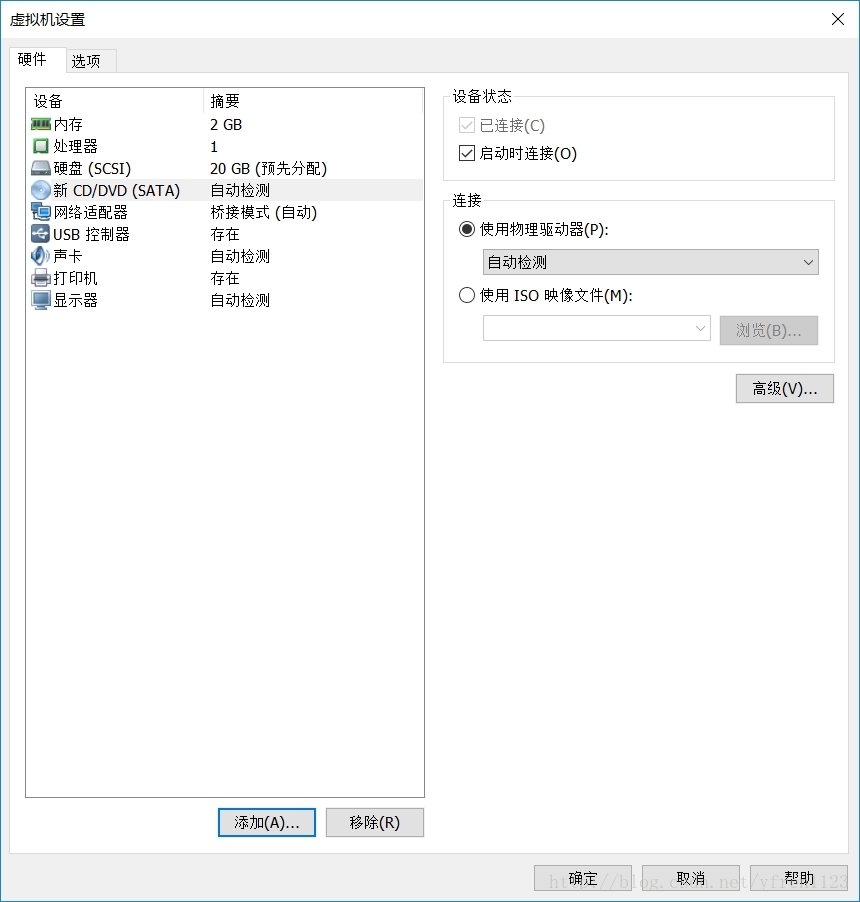
之后点击界面上开始按钮旁的分支选项,选择其中的打开电源时进入固件。
首先进行关于虚拟机的BIOS设置,设置完成之后按下F10保存并退出。
进而电脑重启进入Ubuntu系统的安装,这里值得注意的是,语言请都选择英文。
4.VMware Tools的安装,并配置共享文件
用Ctrl-alt-T快捷键进入终端(Terminal),键入su再根据提示输入密码,就可以在该终端下获得超级管理员权限
在VM的界面中,上面有虚拟机选项,点击之后选择后面的安装VMware Tools,于是打开一个文件夹,将其下的唯一一个压缩包复制到Ubuntu系统文件的根目录下,解压。产生一个distrib文件夹。
用Ctrl-alt-T快捷键进入终端,输入cd vmware-tools-distrib进入该文件,键入./vmware-install.pl运行其下的文件,根据提示输入y确认,稍等片刻完成安装。
回到刚才的虚拟机设置,在选项后面的共享文件中选择电脑上面的某个文件夹即可,这样就可以使用cd /mnt/hgfs在终端下访问电脑中的文件了。
5.至此完成了Ubuntu系统的全部安装!
ROS系统的安装
这里的介绍将会按照ROS官网上的安装教程进行。由于这部分内容已经有了中文版,所以直接按照上述的进行就好,下面给出一些细节提示。
提示:
- 文中的每一个步骤都需要完成,否则会出错。
- 终端下的复制粘贴需要使用
Ctrl+shift+v完成,但是不可以在虚拟机外部和虚拟机内部之间进行复制粘贴操作,所以,一个解决方法是直接在Ubuntu里面的浏览器中打开该网站,使用Ctrl+C复制,并在终端中使用Ctrl+shift+v完成 - 这里面镜像的安装方法可能是Windows用户不熟悉的,按照我的理解是,现在索取下载目录再进行下载的方式,这根Python有些类似,不过Python是在Windows下的
SourceList按照网上的推荐可以使用国内的,比如如下的
$ sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list5.其他的安装跟教程一致即可。
初次运行
先在一个终端里面键入roscore。注意这个终端不能关闭,其他的操作在其他的终端中进行,这或许也是Ubuntu与Windows的一大区别。
你应该可以看到
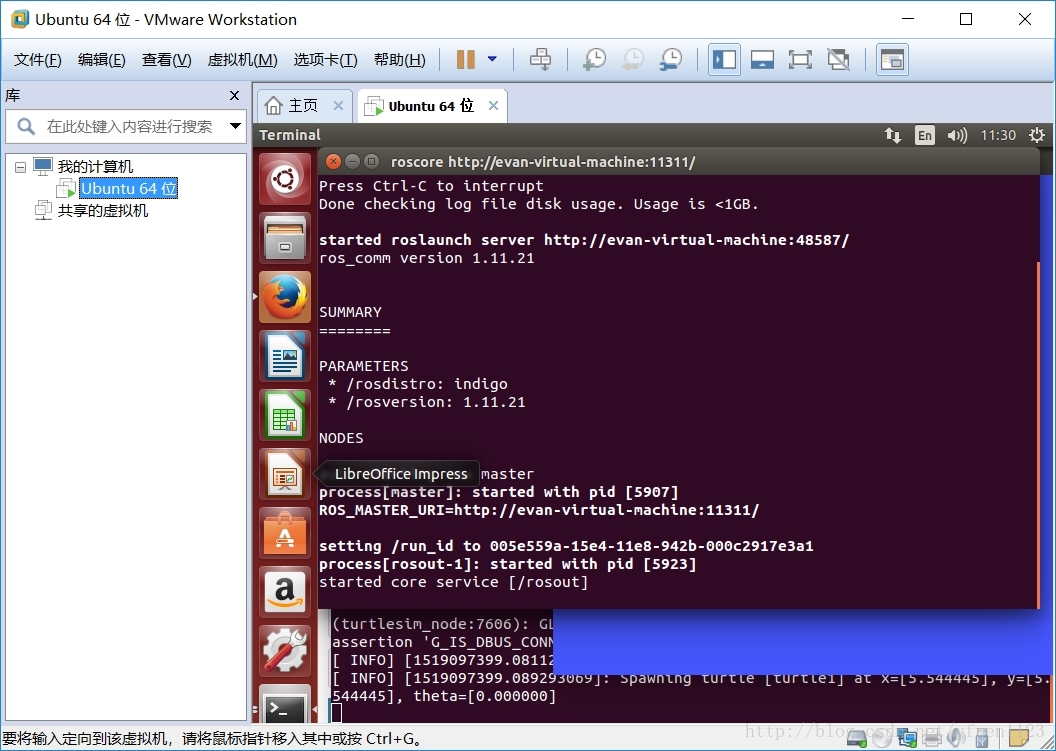
再打开一个终端,键入rosrun turtlesim turtlesim_node
这是你可以看到小乌龟如下,不过它还不能动。

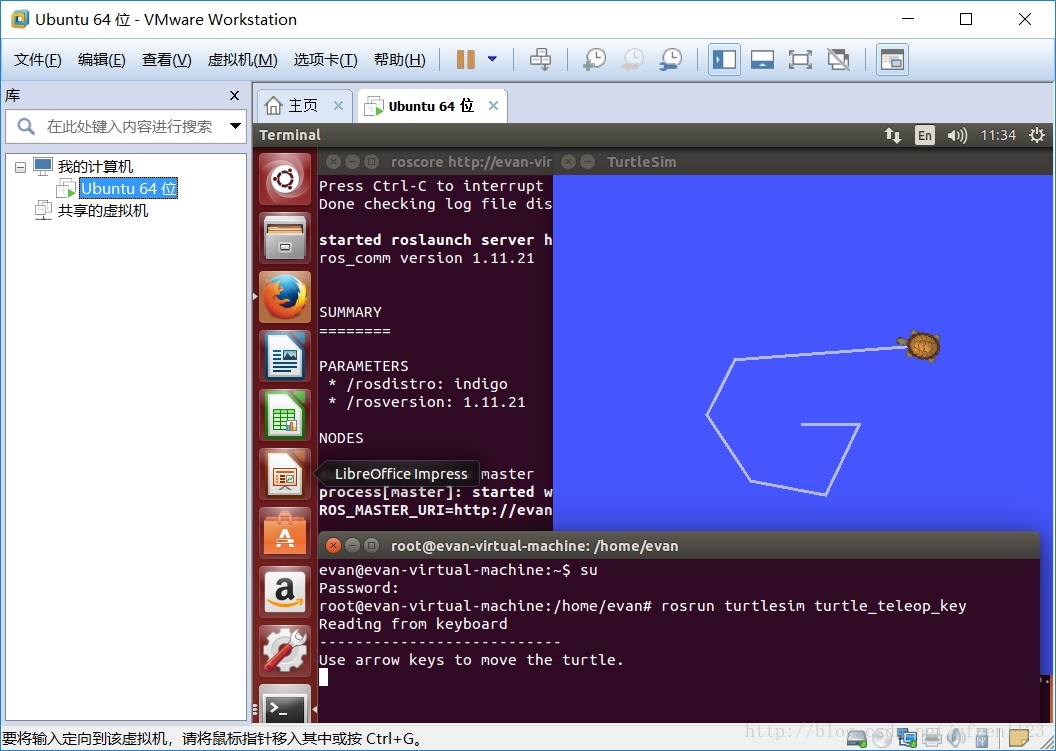
接着再打开一个终端,并输入$ rosrun turtlesim turtle_teleop_key
接着试着在该终端的光标闪烁情况下按下方向键,于是小乌龟可以移动了
如果你打开了roscore但是又不小心关了,就会在打开小乌龟时出现roscore cannot run as another roscore
这是只要键入下列即可
killall -9 roscore
killall -9 rosmaster大功告成
笔者使用Window10系统,虽然现在Windows的Store里面已经提供Ubuntu系统,但是笔者能力有限,所以这里还是提供笔者亲测虚拟机安装方法。能力优秀的朋友们可以尝试直接使用上述系统。
参考资料
【1】实验楼ROS教程
【2】Ubuntu安装教程
【3】ROS官方安装指导