51单片机系统浓缩图

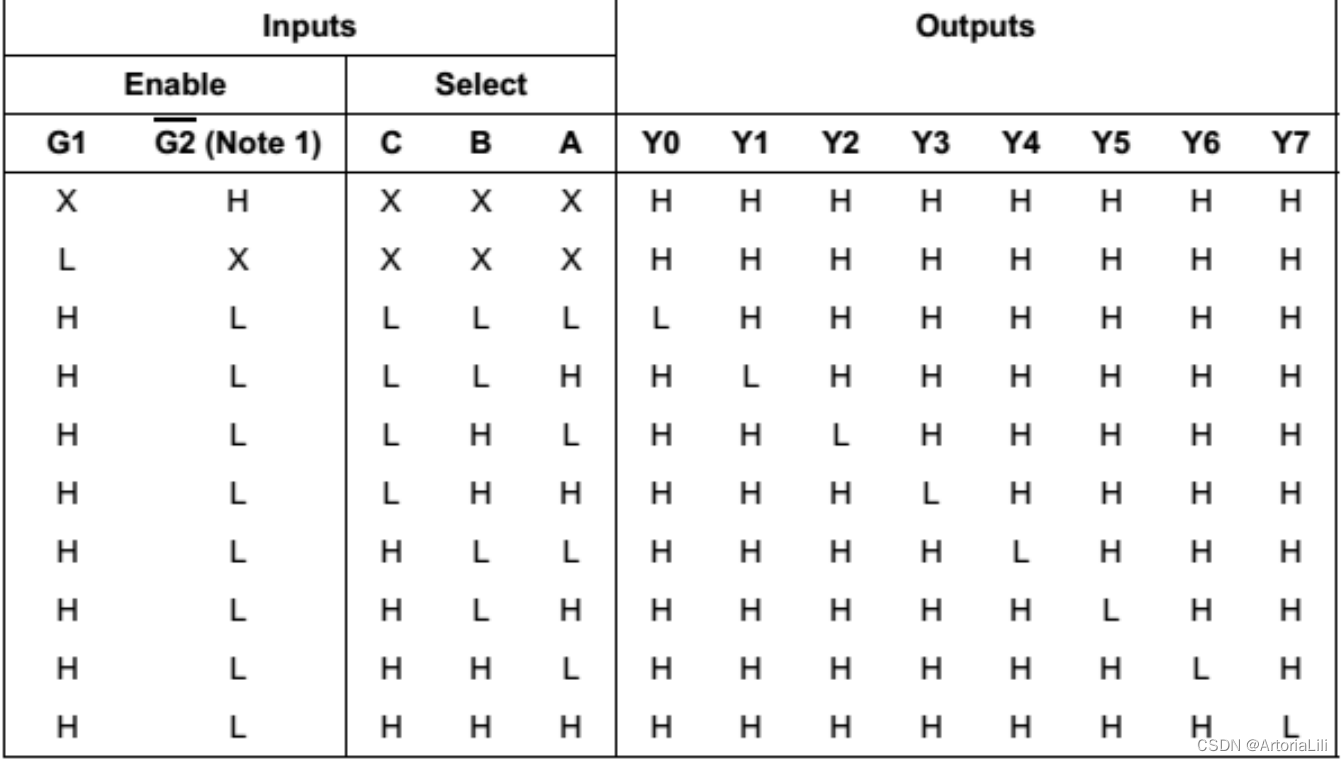
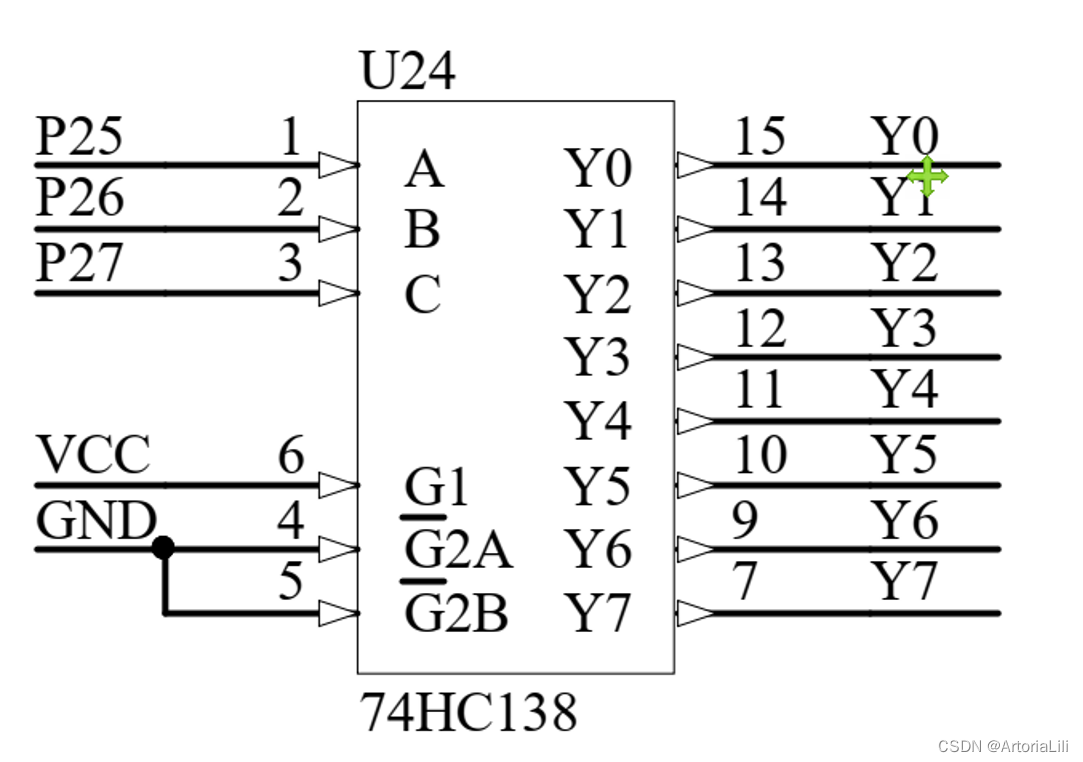
1. HC138译码器
· 用3个输入引脚,实现8个输出引脚,而且这个八个输出引脚中只要一个低电平,所以我们只需要记住真值表就行
#include "reg52.h"
sbit HC138_A = P2^5;
sbit HC138_B = P2^6;
sbit HC138_C = P2^7;
void Init74HC138(unsigned char n)
{
switch(n)
{
case 4: //LED
HC138_A = 0;
HC138_B = 0;
HC138_C = 1;
break;
case 5: //蜂鸣器与译码器
HC138_A = 1;
HC138_B = 0;
HC138_C = 1;
break;
case 6: //数码管位置
HC138_A = 0;
HC138_B = 1;
HC138_C = 1;
break;
case 7: //数码管内容
HC138_A = 1;
HC138_B = 1;
HC138_C = 1;
break;
case 8: //关闭所有设备
HC138_A = 0;
HC138_B = 0;
HC138_C = 0;
break;
}
}
由高人指点,这种方法并不好用,因为在译码器切换的时候,他是加上去的,也就是会打开到别的寄存器,所以我们直接使用下面的方法。
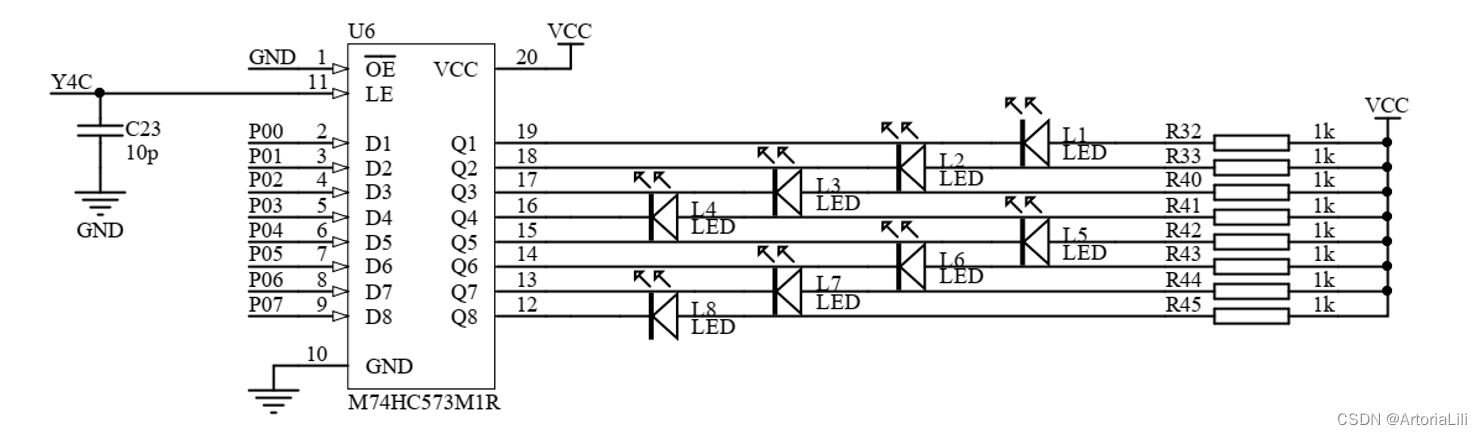
2. HC573
573锁存器有20个引脚,D1~D8是数据输入端,Q1~Q8是数据输出端,LE为锁存控制端。当锁存使能端LE为高时,573的锁存对于数据是透明的(也就是说输出同步)。当锁存使能变低时,符合建立时间和保持时间的数据会被锁存。使用其可以替换HC138,两个功能相同
#include "reg52.h"
void SelectHC573(unsigned channel)
{
switch(channel)
{
case 4:
P2 = (P2 & 0x1f) | 0x80;
break;
case 5:
P2 = (P2 & 0x1f) | 0xa0;
break;
case 6:
P2 = (P2 & 0x1f) | 0xc0;
break;
case 7:
P2 = (P2 & 0x1f) | 0xe0;
break;
case 0:
P2 = (P2 & 0x1f) | 0x00;
break;
}
}两者的功能相同,因此我们可以简便的来替代一下
void InitHC138 (unsigned char n)
{
switch(n)
{
case 4:
P2=(P2&0x1f)|0x80;
break;
case 5:
P2=(P2&0x1f)|0xa0;
break;
case 6:
P2=(P2&0x1f)|0xc0;
break;
case 7:
P2=(P2&0x1f)|0xe0;
break;
}
}3. 控制LED与继电器
两者都是直接给对应引脚给上电平即可

// 任务:
/* 先让奇数的灯闪,再让偶数的灯闪,然后所有的灯闪3下,最后依次点亮所有的灯,然后再依次熄灭,然后循环 */
void LEDRunning()
{
char i = 0;
P0 = 0xaa;
Delay(60000);
P0 = 0x55;
Delay(60000);
for(i = 0; i < 3; i++)
{
P0 = 0x00; //全灭
Delay(60000);
P0 = 0xff; //全亮
Delay(60000);
}
for(i = 0; i < 8; i++)
{
P0 <<= 1; //按顺序依次闪过
Delay(60000);
}
for(i = 0; i < 8; i++)
{
P0 <<= 1;
P0 |= 1; //熄灭
Delay(60000);
}
}
main()
{
Init74HC138(4); //打开LED的138
while(1)
{
LEDRunning();
}
}蜂鸣器与继电器
#include "reg52.h"
void Delay(unsigned int t)
{
while(t--);
while(t--);
}
void InitHC138(unsigned char n)
{
switch(n)
{
case 4:
P2 = (P2 & 0X1f) | 0x80;
break;
case 5:
P2 = (P2 & 0X1f) | 0xa0;
break;
case 6:
P2 = (P2 & 0X1f) | 0xc0;
break;
case 7:
P2 = (P2 & 0X1f) | 0xe0;
break;
}
}
void OutPutP0(unsigned char channel, unsigned char dat)
{
InitHC138(channel);
P0 = dat;
}
void LEDRunning()
{
unsigned char i;
for(i = 0; i < 3; i++)
{
OutPutP0(4,0x00);
Delay(60000);
Delay(60000);
OutPutP0(4,0xff);
Delay(60000);
Delay(60000);
}
for(i = 1; i <= 8; i++)
{
OutPutP0(4,(0xff << i));
Delay(60000);
}
OutPutP0(5,0x10);
Delay(60000);
Delay(60000);
OutPutP0(5,0x00);
InitHC138(4);
for(i = 1; i <= 8; i++)
{
OutPutP0(4,~(0xff << i));
Delay(60000);
}
OutPutP0(5,0x40);
Delay(60000);
Delay(60000);
OutPutP0(5,0x00);
}
void InitSystem()
{
OutPutP0(5,0x00);
}
void main()
{
InitSystem();
while(1)
{
LEDRunning();
}
}4. 数码管
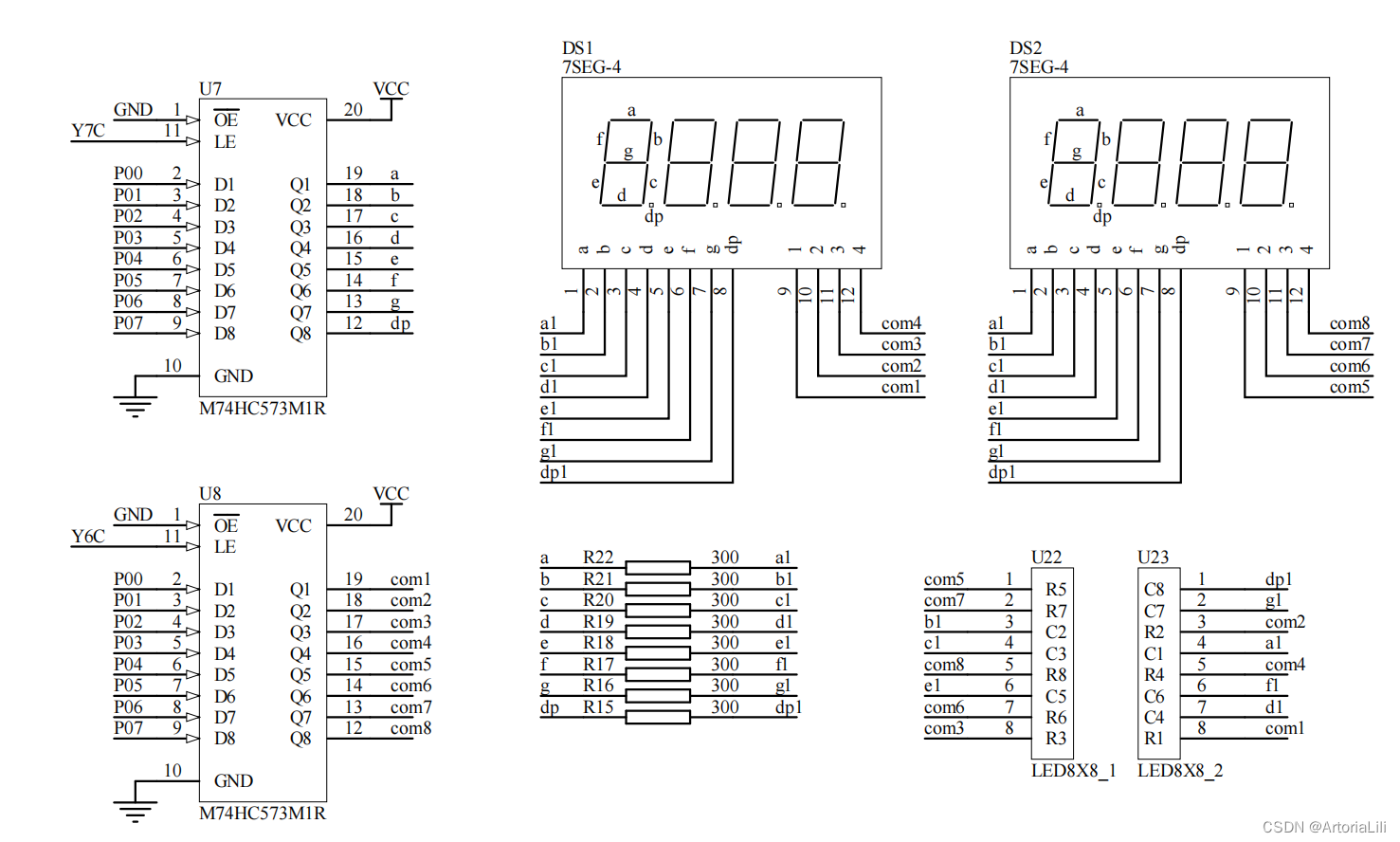
其中a、b、c、d、e、f、g、dp引脚分别对应8个段码,该8个引脚通过74HC573锁存器与单片机的P0端口相连。另外有com1~com4四个公共控制脚,该应用为高电平则使能对应位的数码管。两个F3461BH一共有8个com控制引脚,也是通过74HC573锁存器与单片机的P0端口相连的。因此,在操控数码管显示的过程中也离不开74HC138译码器和74HC573锁存器。
任务:
在 8 位数码管中,左边 4 位数码管显示 年份“2018 ”,接着 2 位是分隔符“--”,靠右的2 位数码管显示月份。从 1 月份开始,每隔一段时间加 1 个月,到 12 月之后又从 1 月开始递增, 如此循环往复。
#include "reg52.h"
unsigned char code SMG_duanma[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,
0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
unsigned char yue=1;
void Delay(unsigned int t)
{
while(t--);
}
void InitHC138 (unsigned char n) //ͨµÀÑ¡Ôñ
{
switch(n)
{
case 4:
P2=(P2&0x1f)|0x80;
break;
case 5:
P2=(P2&0x1f)|0xa0;
break;
case 6:
P2=(P2&0x1f)|0xc0;
break;
case 7:
P2=(P2&0x1f)|0xe0;
break;
}
}
void ShowSMG_Bit(unsigned char dat,unsigned int pos)
{
InitHC138(6); //ÊýÂë¹ÜµÄλÖÃ
P0=0X01<<pos;
InitHC138(7); //ÊýÂë¹ÜµÄÄÚÈÝ
P0=dat;
}
void Display_SMG()
{
ShowSMG_Bit(SMG_duanma[2],0);
Delay(500);
ShowSMG_Bit(SMG_duanma[0],1);
Delay(500);
ShowSMG_Bit(SMG_duanma[1],2);
Delay(500);
ShowSMG_Bit(SMG_duanma[8],3);
Delay(500);
ShowSMG_Bit(SMG_duanma[16],4);
Delay(500);
ShowSMG_Bit(SMG_duanma[16],5);
Delay(500);
ShowSMG_Bit(SMG_duanma[yue/10],6);
Delay(500);
ShowSMG_Bit(SMG_duanma[yue%10],7);
Delay(500);
}
void Delay2(unsigned int t)
{
while(t--)
{
Display_SMG();
}
}
void InitSystem()
{
InitHC138(5); //¹Ø±Õ¼ÌµçÆ÷
P0=0x00;
InitHC138(4); //´ò¿ªµÆ
P0=0xff;
P2=0x00; //¹Ø±ÕHC138
}
void main()
{
InitSystem();
while(1)
{
Display_SMG();
yue++;
if(yue>12)
yue=1;
Delay2(100);
}
}5. 独立按键
一般情况下,独立按键有两个引脚,其中一个通过上拉电阻接到单片机的I/O端口,另外一端接地。也就是说,平时按键没有动作的时候,输出的是高电平,如果有按下动作发生,则输出的是低电平。那么,我们在程序设计的时候,只要扫描跟按键引脚相连的I/O端口,如果发现有低电平产生,则判定该按键处于按下状态。有些时候,电路或者外围有电磁干扰,也会使单片机的I/O端口产生低电平,这种干扰信号会让单片机误认为是按键动作。所以,在扫描按键的时候应该做去抖动处理,把干扰信号过滤掉,从而获得准确的按键状态信号。
任务:1、将 CT107D 上 J5 处跳帽接到 2~3 引脚,使 S4、S5、S6 和 S7 成为 4 个独立按键。2、系统上电后,关闭蜂鸣器,关闭继电器,关闭 8 个 LED 灯。3、循环扫描按键状态,在确认按键按下时,进行去抖动处理。当 S7 按键按下时,点亮L1 指示灯,松开后熄灭;当 S6 按键按下时,点亮 L2 指示灯,松开后熄灭;当 S5 按键按下时,点亮 L3 指示灯,松开后熄灭;当 S4 按键按下时,点亮 L4 指示灯,松开后熄灭
#include "reg52.h"
// 按键定义
sbit S7=P3^0;
sbit S6=P3^1;
sbit S5=P3^2;
sbit S4=P3^3;
//灯光定义
sbit L1=P0^0;
sbit L2=P0^1;
sbit L3=P0^2;
sbit L4=P0^3;
sbit L5=P0^4;
sbit L6=P0^5;
void SelectHC138(unsigned char n)
{
switch(n)
{
case 4:
P2=(P2&0x1f)|0x80;
break;
case 5:
P2=(P2&0x1f)|0xa0;
break;
case 6:
P2=(P2&0x1f)|0xc0;
break;
case 7:
P2=(P2&0x1f)|0xe0;
break;
}
}
void Delay(unsigned int t)
{
while(t--);
}
unsigned char flag=0;
void KeyWorking()
{
if(S7==0)
{
Delay(100);
if(S7==0)
{
if(flag==0)
{
L1=0;
flag=1;
}
else if(flag==1)
{
L1=1;
flag=0;
}
while(S7==0);
}
}
if(S6==0)
{
Delay(100);
if(S6==0)
{
if(flag==0)
{
L2=0;
flag=2;
}
else if(flag==2)
{
L2=1;
flag=0;
}
while(S6==0);
}
}
if(S5==0)
{
Delay(100);
if(S5==0)
{
if(flag==1)
{
L3=0;
while(S5==0);
L3=1;
}
else if(flag==2)
{
L5=0;
while(S5==0);
L5=1;
}
}
}
if(S4==0)
{
Delay(100);
if(S4==0)
{
if(flag==1)
{
L4=0;
while(S4==0);
L4=1;
}
else if(flag==2)
{
L6=0;
while(S4==0);
L6=1;
}
}
}
}
void InitSystem()
{
SelectHC138(5);
P0=0x00;
SelectHC138(4);
P0=0xff;
}
void main()
{
InitSystem();
while(1)
{
KeyWorking();
}
}6 .矩阵键盘的使用
与独立按键不同的是,按键的两个引脚都分别连接的单片机的I/O端口,一个作为行信号,另外一个作为列信号。
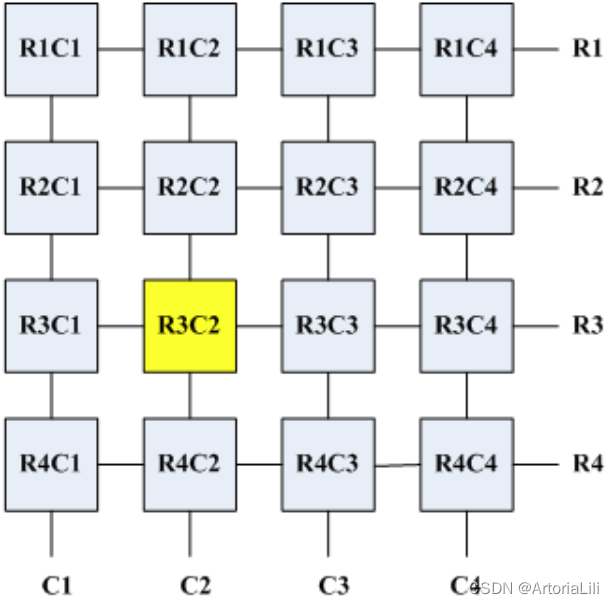
对与矩阵键盘,我们只能逐行扫描,然后读取列的状态信号。如果R3行输出低电平,那么黄色按键如果有按下动作的话,那读取C2列信号也应该为低电平,而该行上其他没有按下动作的按键的列信号则为高电平。因此,我们可以得到矩阵键盘的基本扫描步骤:
<1> R1输出低电平,R2、R3、R4输出高电平,逐个读取判断列信号,如果都为高电平则R1行上没有按键按下。
<2> R2输出低电平,R1、R3、R4输出高电平,逐个读取判断列信号。
<3> R3输出低电平,R1、R2、R4输出高电平,发现C2列信号为低电平,那么可以判断得R3行的C2列的按键有按下动作。
<4> R4输出低电平,R1、R3、R4输出高电平,逐个读取判断列信号。
任务:1、将 CT107D 上 J5 处跳帽接到 1~2 引脚,使 S4 到 S19 成为 4X4 的矩阵键盘。2、系统上电后,关闭蜂鸣器,关闭继电器,关闭 8 个 LED 灯。3、循环扫描矩阵键盘状态,发现有按键按下,等待其松开后,在数码管的最左边 1 位显示相应的数字。从左至右,从上到下,依次显示“ 0 ”到“ F ”。即按下 S7 ,显示“ 0 ”,按下 S11 显示“ 1 ”,按下 S15 显示“ 2 ”,按下 S6 显示“ 4 ”...依次类推。
#include "reg52.h"
sfr P4=0xc0;
sbit S1=P3^0;
sbit S2=P3^1;
sbit S3=P3^2;
sbit S4=P3^3;
sbit C1=P4^4;
sbit C2=P4^2;
sbit C3=P3^5;
sbit C4=P3^4;
unsigned char code SMG_DM[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,
0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
void Delay(unsigned char t)
{
while(t--);
}
void SelectHC138(unsigned char n)
{
switch(n)
{
case 4:
P2=(P2&0x1f)|0x80;
break;
case 5:
P2=(P2&0x1f)|0xa0;
break;
case 6:
P2=(P2&0x1f)|0xc0;
break;
case 7:
P2=(P2&0x1f)|0xe0;
break;
}
}
unsigned char Key=0;
void SMG_Bit(unsigned char dat)
{
SelectHC138(6);
P0=0x01;
SelectHC138(7);
P0=dat;
}
void ScanKey()
{
//==========µÚÒ»ÐÐ
S1=0;S2=1;S3=1;S4=1;
if(C1==0)
{
Delay(100);
if(C1==0)
Key=0;
while(C1==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C2==0)
{
Delay(100);
if(C2==0)
Key=1;
while(C2==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C3==0)
{
Delay(100);
if(C3==0)
Key=2;
while(C3==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C4==0)
{
Delay(100);
if(C4==0)
Key=3;
while(C4==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
//==========µÚÒ¶þÐÐ
S1=1;S2=0;S3=1;S4=1;
if(C1==0)
{
Delay(100);
if(C1==0)
Key=4;
while(C1==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C2==0)
{
Delay(100);
if(C2==0)
Key=5;
while(C2==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C3==0)
{
Delay(100);
if(C3==0)
Key=6;
while(C3==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C4==0)
{
Delay(100);
if(C4==0)
Key=7;
while(C4==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
//==========µÚÈýÐÐ
S1=1;S2=1;S3=0;S4=1;
if(C1==0)
{
Delay(100);
if(C1==0)
Key=8;
while(C1==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C2==0)
{
Delay(100);
if(C2==0)
Key=9;
while(C2==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C3==0)
{
Delay(100);
if(C3==0)
Key=10;
while(C3==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C4==0)
{
Delay(100);
if(C4==0)
Key=11;
while(C4==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
//==========µÚËÄÐÐ
S1=1;S2=1;S3=1;S4=0;
if(C1==0)
{
Delay(100);
if(C1==0)
Key=12;
while(C1==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C2==0)
{
Delay(100);
if(C2==0)
Key=13;
while(C2==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C3==0)
{
Delay(100);
if(C3==0)
Key=14;
while(C3==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
if(C4==0)
{
Delay(100);
if(C4==0)
Key=15;
while(C4==0)
{
SMG_Bit(SMG_DM[Key]);
}
}
}
void InitSystem()
{
SelectHC138(5);
P0=0x00;
SelectHC138(4);
P0=0xff;
}
void main()
{
InitSystem();
while(1)
{
//SMG_Bit(SMG_DM[Key]);
ScanKey();
}
}7. 中断相关寄存器
一般来说,51单片机有5个中断源(忽略定时/计数器2),分2个优先级,这个5个中断源按照自然优先级从高到低依次为:
外部中断0:INT0
定时/计数器0:TF0
外部中断1:INT1
定时/计数器1:TF1
串口中断:RI/TI
中断相关的寄存器有4个,每个寄存器都是可以位寻址的,这该编程带来了方便。 其中2个为控制寄存器:IE寄存器与IP寄存器:

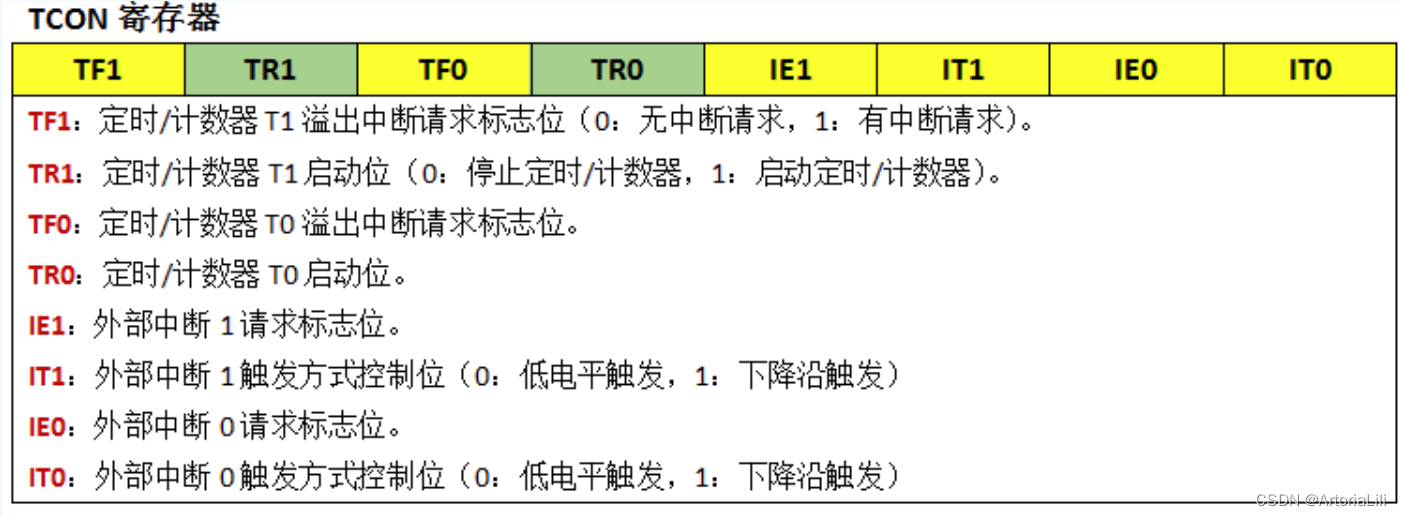
 另外2个为中断请求标志:TCON寄存器与SCON寄存器:
另外2个为中断请求标志:TCON寄存器与SCON寄存器:

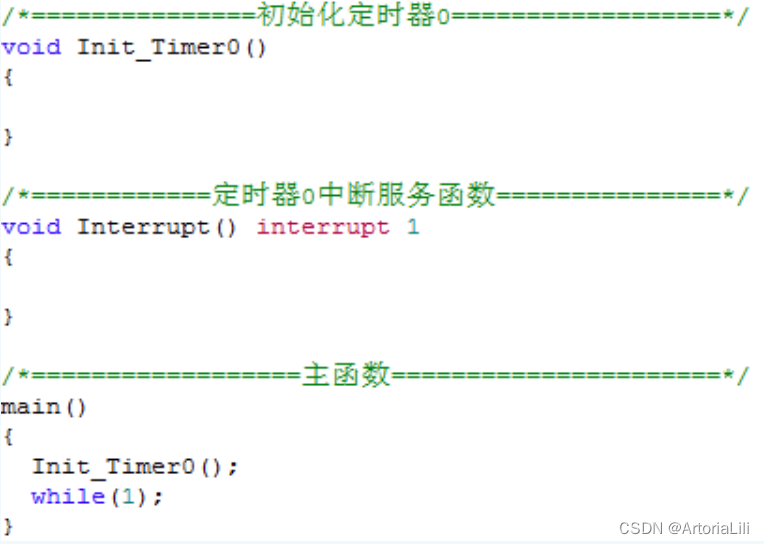
一般情况下,中断的处理函数有两个,其一为中断初始化函数,其二为中断服务函数。初始化函数就是一个普通的函数,而中断服务函数却有特殊的格式要求:
<1> 中断函数没有返回值,也不能带参数。
<2> 函数名后面要跟一个关键字interrupt,说明这是一个中断服务函数。
<3> 在关键字interrupt后面要跟上中断号,说明这个中断服务函数是为那个中断服务的。
8.定时器
51单片机有两个定时/计数器T0和T1,为16位加法计数器,由低8位TLx和高8位THx两个寄存器组成,最大计数值为65535个计数脉冲。
该加1计数器的计数脉冲来源有2个:
<1> 系统时钟振荡器输出的12分频。
<2> T0或T1引脚输入的外部脉冲信号。
每接收到一个计数脉冲,计数器就会加1,当计数值累计至全为1时(8位255,13位8191,16位65535),再输入一个计数脉冲,计数器便会溢出回零,并且计数器的溢出是TCON寄存器的TF0或TF1位置1,同时向内核提出中断请求。如果定时/计数器工作于定时模式,则表示间隔定时时间到,如果工作与计数模式,则表示计数值已满。
假设单片机的外部晶振为12MHz,那么,经过12分频后输入计数器的计数脉冲为1MHz,即每个脉冲的周期为1us。因此定时器T0的16位工作模式最大的定时时间为65535us,65.5ms。如果要定时10ms的话,计数器就不能够从0开始计数了,必须给它一个计数初值。怎么计算这个初值呢?
要定时10ms,则相当于计数10000个脉冲后计数器的值就到达65535了,那么开始计数的这个地方就是计数初值。
65535 - 10000 = 55535 = 0xd8ef
把这个计算得到的初值写入TH0和TL0寄存器即可:
TH0 = 0xd8;或者 TH0 = (65535 - 10000) / 256;
TL0 = 0xef; 或者 TL0 = (65535 - 10000) % 256;
定时/计数器相关的寄存器除了计数初值寄存器THx和TLx之外,就是TMOD寄存器和TCON寄存器,务必掌握。
<1> TMOD模式控制寄存器,不能进行位寻址,只能字节操作。
<2> TCON中断标志寄存器
定时/计数器的程序设计中,通常有两个函数:初始化函数和中断服务函数。
在初始化函数中,一般需要进行以下几个配置:
<1> 配置工作模式,即对TMOD寄存器编程。
<2> 计算技术初值,即对THx和TLx寄存器进行赋值。
<3> 使能定时/计数器中断,即ET0或ET1置1。
<4> 打开总中断,即EA =1。
<5> 启动定时器,即TR0或TR1置1。
在中断服务函数中,一般需要进行以下的编程:
<1> 如果不是自动重装模式,需要对THx和TLx重新赋值。
<2> 进行间隔定时到达的逻辑处理(越少越好)。
任务:
1、系统上电后,关闭蜂鸣器,关闭继电器,关闭 8 个 LED 灯。2、利用定时/计数器 T0 的模式 1 实现 50ms 的间隔定时。3、在 50ms 间隔定时的基础上,每隔 1 秒 L1 指示灯闪烁一次,即 L1 指示灯循环点亮0.5 秒,熄灭 0.5 秒。4、每隔 10 秒 L8 指示灯闪烁 1 次,即 L1 指示灯循环点亮 5 秒,熄灭 5 秒
#include "reg52.h"
sbit HC138_A = P2^5;
sbit HC138_B = P2^6;
sbit HC138_C = P2^7;
sbit LED1 = P0^0;
sbit LED2 = P0^1;
void Init74HC138(unsigned char n)
{
switch(n)
{
case 4:
HC138_A = 0;
HC138_B = 0;
HC138_C = 1;
break;
case 5:
HC138_A = 1;
HC138_B = 0;
HC138_C = 1;
break;
case 6:
HC138_A = 0;
HC138_B = 1;
HC138_C = 1;
break;
case 7:
HC138_A = 1;
HC138_B = 1;
HC138_C = 1;
break;
case 8:
HC138_A = 0;
HC138_B = 0;
HC138_C = 0;
break;
}
}
/*===============初始化定时器0==================*/
void Init_Timer0()
{
TMOD = 0x01; //16位定时模式
TH0 = (65536 - 50000) / 256; //定时50ms
TL0 = (65536 - 50000) % 256;
ET0 = 1; //使能定时器T0中断
EA = 1; //使能总中断
TR0 = 1; //启动定时器T0
}
/*============定时器0中断服务函数===============*/
unsigned char count = 0;
void SeviceTimer0() interrupt 1
{
TH0 = (65536 - 50000) / 256;
TL0 = (65536 - 50000) % 256;
count++;
if(count == 10) //0.5秒定时到
{
LED1 = ~LED1;
}
if(count == 20) //1秒定时到
{
LED2 = ~LED2;
count = 0;
}
}
/*==================主函数======================*/
main()
{
Init74HC138(4);
Init_Timer0();
while(1);
}9. PWM控制
1、系统上电后,关闭蜂鸣器,关闭继电器,关闭 8 个 LED 灯。2、PWM 脉宽信号的频率为 100Hz。3、L1 指示灯有 4 种亮度,分别是:完全熄灭、10%的亮度、50%的亮度和 90%的亮度。4、按下 S7 按键,循环切换 L1 指示灯的四种亮度模式
#include "reg52.h"
#include "HC573.h"
#includd "SMG.h"
sbit L1 = P0^0;
sbit S7 = P3^0;
/*¶¨Ê±Æ÷Ïà¹Ø*/
unsigned char count = 0;
void InitTimer0()
{
TMOD = 0x01; //ʹÓö¨Ê±Æ÷1µÄ16λģʽ
TH0 = (65535 - 100)/256 // ¼ÆÊý³õÖµ
TL0 = (65535 - 100)%256
ET0 = 1;
EA = 1;
TR0 = 1;
}
void ServiceTimer0() interrupt 1
{
TH0 = (65535 - 100)/256 // ¼ÆÊý³õÖµ
TL0 = (65535 - 100)%256
count++;
if(count == pwm_duty)
{
L1 = 1;
}
if(count == 100)
{
L1 = 0;
count = 0;
}
}
// °´¼ü
unsigned char stat = 0;
void Scankeys()
{
if(S7 == 0)
{
Delay(200)
if(S7 == 0)
{
switch(stat)
{
case 0:
L1 = 0; //¿ªµÆ
pwm_duty = 10;
stat =1;
break;
case 1:
pwm_duty = 50;
stat =2;
break;
case 1:
pwm_duty = 90;
stat =3;
break;
case 3:
L1 = 0;
stat = 0;
break;
}
}
}
}
10. 串行接口
在串口通信的程序设计中,主要有串口初始化和数据收发两个部分。
在初始化函数中,基本步骤如下:
<1> 设置定时器1的工作模式,也就是对TMOD寄存器赋值。
<2> 计算波特率参数,并赋值给TH1和TL1寄存器。
<3> 打开定时器1。
如果使用的是STC 12系统单片机,则要设置AUXR寄存器。
<4> 设置SCON寄存器。
<5> 使能串口中断ES。
<6> 使能总中断EA。
1、初始化串口为模式 1,即 8 位 UART 模式,波特率 9600,允许接收。2、数据发送采用查询方式,数据接收采用中断方式。3、系统上电初始化之后,单片机向上位机发送两个字节:0x5a 和 0xa5(串口助手以十六进制 HEX 发送和显示)。4、串口每成功接收到一个字节后,在该字节基础上加 1,然后通过串口发送回上位机。5、注意 89C52 单片机和 IAP15F2K61S2 单片机串口应用的差别,使用 9600 波特率时,晶振时钟选择 11.0592MHz。
#include "reg52.h"
sfr AUXR=0x8e;
unsigned char tmpRecv;
void Init_Uart()
{
TMOD=0x20;
TH1=0xfd;
TL1=0xfd;
AUXR=0x00;
TR1=1;
SCON = 0x50;
ES=1;
EA=1;
}
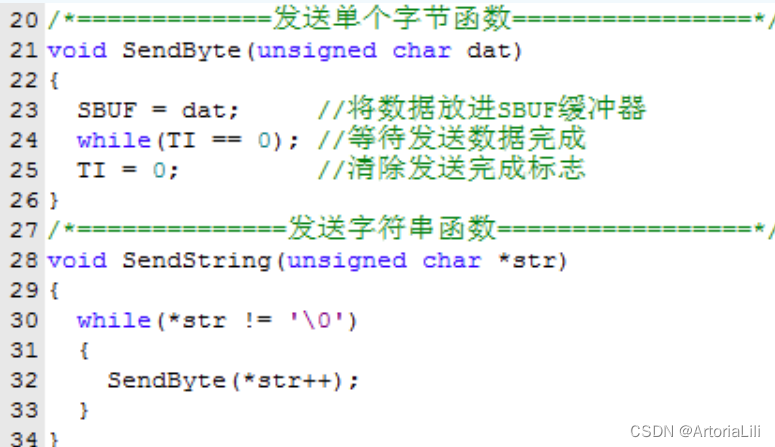
void SendByte(unsigned char dat)
{
SBUF = dat;
while(TI == 0);
TI = 0;
}
main()
{
Init_Uart();
SendByte(0x5a);
SendByte(0xa5);
while(1);
}一般情况下,上位机的命令可能不是一个字节,而是多个字节组成的命令帧,有的长度固定,有的长度变化;而且要求返回的数据可能也不是一个字节,可能是一个数组,也有可能是一个字符串等。在蓝桥杯的比赛中,也不可能让你只是收发一个字节而已,因此,在串口这一个单元中,必须多加一个强化环境,掌握多字节的数据帧收发应用。
1、初始化串口为模式 1,即 8 位 UART 模式,波特率 9600,允许接收。
2、数据发送采用查询方式,数据接收采用中断方式。
3、系统上电后,关闭蜂鸣器,关闭继电器,关闭 8 个 LED 灯,通过串口向上位机发送
字符串:“Welcome to XMF system!”,回车换行。
4、上位机通过串口发送单字节命令,控制单片机的 8 个 LED 灯开关,单片机响应正确
的控制命令后,完成相应的灯光操作。
5、上位机通过串口发送单字节命令,读取单片机运行信息,单片机响应正确的读取命
令后,向上位机返回指定的信息。
串口初始化函数Init_Uart()和单字节发送函数SendByte()就不需要修改,拷过来就能用
<1> 字符发送
<2>字符接收
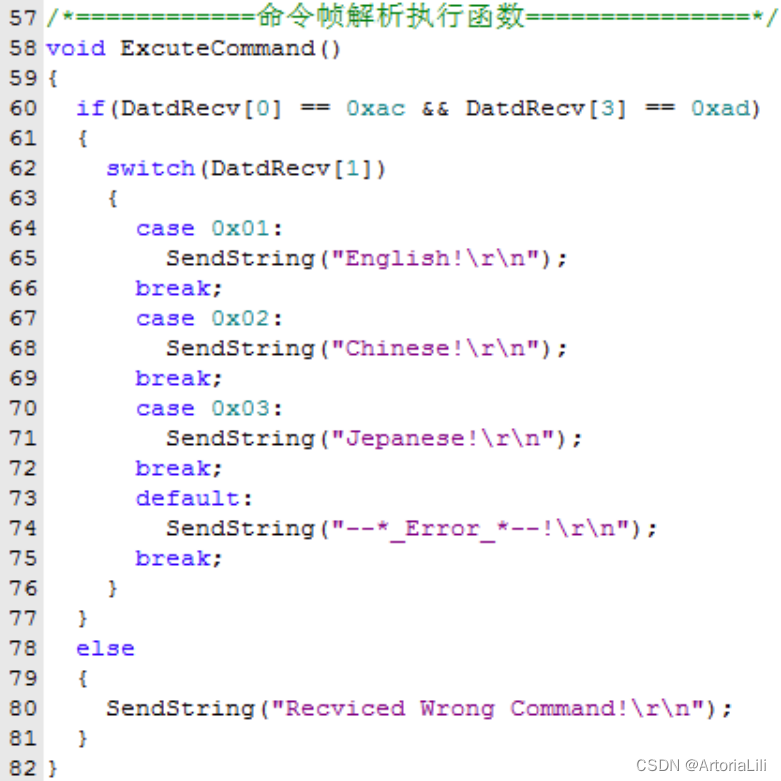
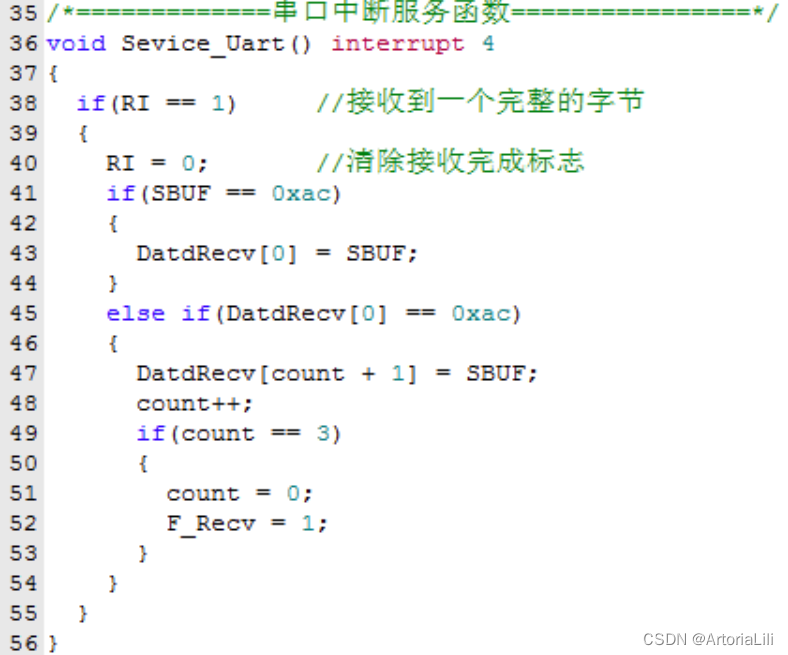 <3>命令解析与执行
<3>命令解析与执行
11.DS18B20温度传感器
在蓝桥杯“单片机设计与开发”赛项中,会提供一个关于DS18B20的库文件,里面有传感器复位、写字节和读字节三个函数。所以,你不一定要把单总线的时序搞清楚,但你一定要把DS18B20的基本操作流程弄明白。
通过单线总线端口访问DS18B20的协议如下:
步骤1: 复位初始化
步骤2: ROM操作指令
步骤3: DS18B20功能指令
三个重要的指令:
<1> CCH:跳过ROM指令,忽略64位ROM地址,直接向DS18B20发起各种温度转换指令。
<2> 44H:温度转换指令,启动DS18B20进行温度转换,转换时间最长为500ms(典型值为200ms),结果保存在高速RAM中。
<3> BEH:读暂存器指令,读取高速暂存存储器9个字节的内容。
读取一次温度传感器数值的操作:
<1> 主机对DS18B20进行复位初始化。
<2> 主机向DS18B20写0xCC命令,跳过ROM。
<3> 主机向DS18B20写0x44命令,开始进行温度转换。
<4> 等待温度转换完成。
<5> 主机对DS18B20进行复位初始化。
<6> 主机向DS18B20写0xCC命令,跳过ROM。
<7> 主机向DS18B20写0xBE命令,依次读取DS18B20发出的从第0一第8,共九个字节的数据。如果只想读取温度数据,那在读完第0和第1个数据后就不再理会后面DS18B20发出的数据即可,或者通过DS18B20复位,停止数据的输出。
(如果你利用大赛提供的DS18B20的库文件,也就是onewire.c和onewire.h,进行程序设计的时候,没能正确的读出温度传感器的数值,对库文件中代码的时序进行适当的调整即可。)、
onewire.h
#include "reg52.h"
sbit DQ = P1^4;
void Delay_OneWire(unsigned int t)
{
while(t--);
}
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(50);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(50);
}
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(50);
}
return dat;
}
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(120);
DQ = 0;
Delay_OneWire(800);
DQ = 1;
Delay_OneWire(100);
initflag = DQ;
Delay_OneWire(50);
return initflag;
}
温度传感器任务:1、将 DS18B20 的底层驱动代码文件正确移植到工程中。2、循环采样启动 DS18B20 进行温度转换。3、将 DS18B20 的温度转换结果读出,进行换算,保留 1 位小数 ,并显示在数码管靠右端,显示格式如图。4、注意,在进行 DS18B20 底层驱动代码文件移植时,需确认单总线的 时序参数是否匹配
12. DS1302时钟系统
DS1302将地址和读写控制放到一个字节里面,形成一个控制字。
为了方便程序设计,我们把读寄存器地址、写寄存器地址和日历时钟寄存器方面用三个数组定义。

任务如下:1、将 DS1302 的底层驱动代码文件正确移植到工程中。2、初始化 DS1302 的默认启动参数为:20 年 4 月 19 日 23 时 58 分 24 秒, 周六 。3、系统上电后, DS1302 实时时钟从默认参数启动运行,并将当前的 时、分、秒 显示在数码管上,时分秒之间用“ - ”分隔。显示格式如图
#include <reg52.h>
#include <intrins.h>
sbit SCK=P1^7;
sbit SDA=P2^3;
sbit RST = P1^3; // DS1302¸´Î»
void Write_Ds1302(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK=0;
SDA=temp&0x01;
temp>>=1;
SCK=1;
}
}
void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
Write_Ds1302(dat);
RST=0;
}
unsigned char Read_Ds1302_Byte ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0; _nop_();
SCK=0; _nop_();
SCK=1; _nop_();
SDA=0; _nop_();
SDA=1; _nop_();
return (temp);
}
DS1302时钟模块
#include "reg52.h"
#include "ds1302.h"
unsigned char Write_DS1302[7]={0x80,0x82,0x84,0x86,0x88,0x8a,0x8c}; //写寄存器
unsigned char Read_DS1302[7]={0x81,0x83,0x85,0x87,0x89,0x8b,0x8d}; //读寄存器
unsigned char Timer[7]={0x50,0x59,0x12,0x18,0x04,0x06,0x22}; //日历寄存器
unsigned char code SMG_DM[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,
0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
void SelectHC138(unsigned char n)
{
switch(n)
{
case 4:
P2=(P2&0x1f)|0x80;
break;
case 5:
P2=(P2&0x1f)|0xa0;
break;
case 6:
P2=(P2&0x1f)|0xc0;
break;
case 7:
P2=(P2&0x1f)|0xe0;
break;
}
}
//时钟初始化
void DS1302_Config()
{
unsigned char i;
Write_Ds1302_Byte(0x8e,0x00);
for(i=0;i<7;i++)
{
Write_Ds1302_Byte(Write_DS1302[i], Timer[i]);
}
Write_Ds1302_Byte(0x8e,0x80);
}
void Read_DS1302_Timer()
{
unsigned char i;
for(i=0;i<7;i++)
{
Timer[i]=Read_Ds1302_Byte(Read_DS1302[i]);
}
if(Timer[2]>0x12)
{
Timer[2]-=0x12;
}
}
void Delay_SMG(unsigned int t)
{
while(t--);
}
void SMG_Bit(unsigned char dat,unsigned char pos)
{
SelectHC138(6);
P0=0x01<<pos;
SelectHC138(7);
P0=SMG_DM[dat];
}
void Display_SMG()
{
SMG_Bit(Timer[2]/16,0);
Delay_SMG(100);
SMG_Bit(Timer[2]%16,1);
Delay_SMG(100);
SMG_Bit(16,2);
Delay_SMG(100);
SMG_Bit(Timer[1]/16,3);
Delay_SMG(100);
SMG_Bit(Timer[1]%16,4);
Delay_SMG(100);
SMG_Bit(16,5);
Delay_SMG(100);
SMG_Bit(Timer[0]/16,6);
Delay_SMG(100);
SMG_Bit(Timer[0]%16,7);
Delay_SMG(100);
}
void InitSystem()
{
SelectHC138(5);
P0=0x00;
SelectHC138(4);
P0=0xff;
}
void main()
{
InitSystem();
DS1302_Config();
while(1)
{
Read_DS1302_Timer();
Display_SMG();
}
}13. 频率测试
#include "reg52.h"
unsigned char code SMG_DM[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,
0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
unsigned int count_f=0;
unsigned int dat=0;
unsigned char count_s=0;
void SelectHC138(unsigned char n)
{
switch(n)
{
case 4:
P2=(P2&0x1f)|0x80;
break;
case 5:
P2=(P2&0x1f)|0xa0;
break;
case 6:
P2=(P2&0x1f)|0xc0;
break;
case 7:
P2=(P2&0x1f)|0xe0;
break;
}
}
//============================ÊýÂë¹ÜÏÔʾ
void Delay_SMG(unsigned int t)
{
while(t--);
}
void SMG_Bit(unsigned char dat,unsigned char pos)
{
SelectHC138(6);
P0=0x01<<pos;
SelectHC138(7);
P0=dat;
}
void Display_SMG()
{
SMG_Bit(SMG_DM[15],0);
Delay_SMG(500);
SMG_Bit(0xff,1);
Delay_SMG(500);
SMG_Bit(0xff,2);
Delay_SMG(500);
if(dat>9999)
{
SMG_Bit(SMG_DM[dat/10000],3);
Delay_SMG(500);
}
if(dat>999)
{
SMG_Bit(SMG_DM[(dat/1000)%10],4);
Delay_SMG(500);
}
if(dat>99)
{
SMG_Bit(SMG_DM[(dat/100)%10],5);
Delay_SMG(500);
}
if(dat>9)
{
SMG_Bit(SMG_DM[(dat/10)%10],6);
Delay_SMG(500);
}
SMG_Bit(SMG_DM[dat%10],7);
Delay_SMG(500);
}
//===============================¶¨Ê±Æ÷
void Init_Timer()
{
TMOD=0x16;
//¶¨Ê±Æ÷0ÓÃ×÷¼ÆÊý 0110
TH0=0xff;
TL0=0xff;
//¶¨Ê±Æ÷1ÓÃ×÷¶¨Ê± 0001
TH1=(65535-50000)/256;
TL1=(65535-50000)%256;
ET0=1;
ET1=1;
EA=1;
TR0=1;
TR1=1;
}
void Service_T0() interrupt 1
{
count_f++;
}
void Service_T1() interrupt 3
{
TH1=(65535-50000)/256;
TL1=(65535-50000)%256;
count_s++;
if(count_s==20)
{
dat=count_f;
count_f=0;
count_s=0;
}
}
void InitSystem()
{
SelectHC138(5);
P0=0x00;
SelectHC138(4);
P0=0xff;
}
void main()
{
InitSystem();
Init_Timer();
while(1)
{
Display_SMG();
}
}14. 2402C存储器使用
在使用前,我们得先明白其是通过IIC总线通信的
没有硬件IIC外设的微处理器中,需要根据总线时序设计IIC接口的驱动程序。包括:起始信号、停止信号、产生应答、等待应答、发送数据和接收数据6个函数。下面以51单片机为例,阐述IIC总线驱动程序的设计。
//IIC
#include "reg52.h"
#include "intrins.h"
#define DELAY_TIME 5
#define SlaveAddrW 0xA0
#define SlaveAddrR 0xA1
sbit SDA = P2^1; /* Êý¾ÝÏß */
sbit SCL = P2^0; /* ʱÖÓÏß */
// 延时函数
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
// 起始信号
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
//停止信号
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//产生答应
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit; // 0£ºÓ¦´ð£¬1£º·ÇÓ¦´ð
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//等待答应
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
//发送数据
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
//接受数据
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
一般情况下,所提供的IIC总线底层驱动代码有“ **.c ”和“ **.h ”两个文件,你需要懂得它们,至少需要了解“ **.h” 头文件,才能正确应用。虽然不再需要编写IIC总线的底层驱动代码,但是对于具体设备的操作还需要结合数据手册来进一步实现,而IIC是需要用在我们的这个24C02存储器当中的

24C02存储器
#include "reg52.h"
#include "iic.h"
unsigned char code SMG_DM[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,
0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
unsigned char dat1 = 0, dat2 = 0, dat3 = 0;
//字节写操作
void SelectHC138(unsigned char n)
{
switch(n)
{
case 4:
P2=(P2&0x1f)|0x80;
break;
case 5:
P2=(P2&0x1f)|0xa0;
break;
case 6:
P2=(P2&0x1f)|0xc0;
break;
case 7:
P2=(P2&0x1f)|0xe0;
break;
}
}
void Delay(unsigned int t)
{
while(t--);
}
void Write_24C02(unsigned char addr, unsigned char dat)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(addr);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
//字节读操作
unsigned char Read_24C02(unsigned char addr)
{
unsigned char tmp;
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(addr);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
tmp = IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return tmp;
}
//数据读写函数
void Read_Write()
{
dat1 = Read_24C02(0x01);
dat2 = Read_24C02(0x03);
dat3 = Read_24C02(0x05);
dat1 = dat1 + 1;
dat2 = dat2 + 2;
dat3 = dat3 + 3;
if(dat1 > 10)
dat1 = 0;
if(dat2 > 20)
dat2 = 0;
if(dat3 > 30)
dat3 = 0;
Write_24C02(0x01, dat1);
Delay(1100);
Write_24C02(0x03, dat2);
Delay(1100);
Write_24C02(0x05, dat3);
Delay(1100);
}
//数码管显示函数
void SMG_Bit(unsigned char dat,unsigned char pos)
{
SelectHC138(6);
P0=0x01<<pos;
SelectHC138(7);
P0=SMG_DM[dat];
}
//显示函数
void Display_24c02()
{
SMG_Bit(dat1/10,0);
Delay(500);
SMG_Bit(dat1%10,1);
Delay(500);
SMG_Bit(16,2);
Delay(500);
SMG_Bit(dat2/10,3);
Delay(500);
SMG_Bit(dat2%10,4);
Delay(500);
SMG_Bit(16,5);
Delay(500);
SMG_Bit(dat3/10,6);
Delay(500);
SMG_Bit(dat3%10,7);
Delay(500);
}
// 初始化函数
void InitSystem()
{
SelectHC138(5);
P0=0x00;
SelectHC138(4);
P0=0xff;
}
void main()
{
InitSystem();
Read_Write();
while(1)
{
Display_24c02();
}
}15.PWM呼吸灯
任务如下:1、将 J5 的 23 脚短接,把 S4 和 S7 设置为 独立按键 。2、系统上电后,关闭蜂鸣器和继电器, L4 和 L5 指示灯 点亮 ,其余的指示灯熄灭。3、按下 S4 按键,松开后, L1 到 L8 八个指示灯进行每隔 1 秒的 呼吸流水点亮 。控制流程为: L1 缓慢 点亮 -> L1 缓慢熄灭-> L2 缓慢 点亮 -> L2 缓慢熄灭... L8 缓慢 点亮 -> L8 缓慢熄灭-> L1 缓慢 点亮 -> L1 缓慢熄灭... 如此循环往复。4、再次按下 S4 按键,松开后,L1 到 L8 八个指示灯从当前状态开始 逆向呼吸流水点亮 。如果当前的水方向为: L1 缓慢 点亮 -> L1 缓慢熄灭-> L2 缓慢 点亮 - >L2 缓慢熄灭... 那么,按下 S4 按键松开后为:L2 缓慢 点亮 -> L2 缓慢熄灭-> L1 缓慢 点亮 -> L1 缓慢熄灭-> L8 缓慢 点亮-> L8 缓慢熄灭-> L7 缓慢 点亮 -> L7 缓慢熄灭... 如此循环往复。5、对于每个 LED 指示灯,缓慢点亮的时长为 0.5 秒 ,缓慢熄灭的时长为 0.5 秒 。6、按下 S4 按键时,当前的指示灯暂停流水变化并保持现有的亮度,直到按键松开后,亮度才开始恢复变化。待当前的亮度变化完成后,才开始改变呼吸流水控制的方向。7、按下 S7 按键时,在数码管上显示 当前 LED 指示灯的位置 和 PWM 脉宽调制信号的 占空比 。按键松开后,数码管熄灭。显示格式如图,在数码管左边的第 1 位数码管显示 LED指示灯的位置,在数码管右边的 2 位数码管显示 PWM 信号占空比。例如:当前点亮 L6 指示灯,PWM 信号的占空比为 30%,那么,数码管最左边的 1 位显示“6”,在最右边的 2 位显示“30”,其余没有使用的数码管熄灭。8、按下 S7 按键时,当前的指示灯暂停流水变化并保持现有的亮度,直到按键松开后,亮度才开始恢复变化
#include "regx52.h"
#include "absacc.h"
sbit S7 = P3^0;
sbit S4 = P3^3;
unsigned char pwm = 0;
unsigned char pwm_duty = 0;
unsigned char times = 0;
unsigned char led_go = 0;
unsigned char stat_go = 0;
unsigned char stat = 0;
unsigned char key_puse = 0;
unsigned char code SMG_duanma[18]=
{0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,
0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
void DelaySMG(unsigned int t)
{
while(t--);
}
void DisplaySMG_Bit(unsigned char pos, unsigned char value)
{
XBYTE[0xE000] = 0xff;
XBYTE[0xC000] = 0x01 << pos;
XBYTE[0xE000] = value;
}
void Display_Info(unsigned char pos, unsigned char duty)
{
DisplaySMG_Bit(0, SMG_duanma[pos]);
DelaySMG(500);
DelaySMG(500);
DisplaySMG_Bit(6, SMG_duanma[duty / 10]);
DelaySMG(500);
DisplaySMG_Bit(7, SMG_duanma[duty % 10]);
DelaySMG(500);
DisplaySMG_Bit(0, 0xff);
DisplaySMG_Bit(6, 0xff);
DisplaySMG_Bit(7, 0xff);
}
void Init_Timer0()
{
TMOD = 0x01;
TH0 = (65535 - 1000) / 256;
TL0 = (65535 - 1000) % 256;
ET0 = 1;
EA = 1;
TR0 = 1;
}
void Service_Timer0() interrupt 1
{
TH0 = (65535 - 1000) / 256;
TL0 = (65535 - 1000) % 256;
if(stat_go == 0)
{
XBYTE[0x8000] = 0xe7;
return;
}
pwm++;
if(pwm <= pwm_duty)
{
XBYTE[0x8000] = ~(0x01 << stat);
}
else if(pwm <= 10)
{
XBYTE[0x8000] = 0xff;
}
else
{
XBYTE[0x8000] = ~(0x01 << stat);
pwm = 0;
if(key_puse == 0)
{
times++;
}
}
}
void LED_Control()
{
if(times == 5)
{
times = 0;
if(led_go == 0)
{
pwm_duty = pwm_duty + 1;
if(pwm_duty == 11)
{
pwm_duty = 10;
led_go = 1;
}
}
else if(led_go == 1)
{
pwm_duty = pwm_duty - 1;
if(pwm_duty == 255)
{
pwm_duty = 0;
led_go = 0;
if(stat_go == 1)
{
stat++;
if(stat == 8)
{
stat = 0;
}
}
else if(stat_go == 2)
{
stat--;
if(stat == 255)
{
stat = 7;
}
}
}
}
}
}
void Scan_Keys()
{
if(S4 == 0)
{
DelaySMG(100);
if(S4 == 0)
{
while(S4 == 0)
{
key_puse = 1;
}
key_puse = 0;
stat_go++;
if(stat_go == 3)
{
stat_go = 1;
}
}
}
if(S7 == 0)
{
DelaySMG(100);
if(S7 == 0)
{
while(S7 == 0)
{
key_puse = 1;
Display_Info(stat + 1, pwm_duty * 10);
}
key_puse = 0;
}
}
}
void Init_System()
{
//XBYTE[0xA000] = 0xff;
XBYTE[0xA000] = 0x00;
XBYTE[0xE000] = 0xff;
XBYTE[0xC000] = 0xff;
Init_Timer0();
}
main()
{
Init_System();
while(1)
{
LED_Control();
Scan_Keys();
}
}16.超声波测距模块的使用
1、超声波模块的 TX 引脚 接到单片机的 P1.0 引脚, RX 引脚 接到单片机的 P1.1 引脚。2、利用超声波传感器测量前端障碍物的距离,测量结果用 厘米 作为单位,显示在数码管 最右边 3 位 。3、测量距离最大约 100 厘米,当障碍物超出测量范围或前方无障碍物,以“ F ”为标志,显示在数码管 最左边 1 位 。4、 超声波传感器测距的工作原理:首先产生 8 个 40KHz 的超声波信号,通过 TX 引脚 发射出去,同时 启动定时器 ,计数计数脉冲,接着等待超声波信号的返回。如果超声波传感器接收到反射回来的信号,则 RX 引脚 变为 低电平 ,这时候 停止定时器 ,读取计数脉冲个数,计算超声波发射出去到反射回来的时间长度 T。最后根据公式: L = V*T/2 ,计算距离。其中 V 为 20 摄氏度时的声速,其值约为: 344 米/秒 。
#include "reg52.h"
#include "intrins.h"
sbit TX = P1^0;
sbit RX = P1^1;
unsigned char code SMG_DuanMa[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,
0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf};
unsigned int distance = 0;
void SelectHC573(unsigned char channel)
{
switch(channel)
{
case 4: P2 = (P2 & 0x1f) | 0x80;break;
case 5: P2 = (P2 & 0x1f) | 0xa0;break;
case 6: P2 = (P2 & 0x1f) | 0xc0;break;
case 7: P2 = (P2 & 0x1f) | 0xe0;break;
case 0: P2 = (P2 & 0x1f) | 0x00;break;
}
}
void InitSystem()
{
SelectHC573(5);
P0 = 0x00;
SelectHC573(4);
P0 = 0xff;
SelectHC573(0);
}
void DisplaySMG_Bit(unsigned char pos,unsigned char dat)
{
SelectHC573(7);
P0 = 0xff;
SelectHC573(6);
P0 = 0x01 << pos;
SelectHC573(7);
P0 = dat;
SelectHC573(0);
}
void DelaySMG(unsigned int t)
{
while(t--);
}
void DisplaySMG()
{
if(distance == 999)
{
DisplaySMG_Bit(0,SMG_DuanMa[15]);
DelaySMG(500);
}
else
{
DisplaySMG_Bit(5,SMG_DuanMa[distance / 100]);
DelaySMG(500);
DisplaySMG_Bit(6,SMG_DuanMa[distance / 10 % 10]);
DelaySMG(500);
DisplaySMG_Bit(7,SMG_DuanMa[distance % 10]);
DelaySMG(500);
}
}
void Delay_12us()
{
unsigned char i;
_nop_();
_nop_();
i = 33;
while (--i);
}
void SendWave()
{
unsigned char j=0;
for(j=0;j<8;j++)
{
TX =1;
Delay_12us();
TX=0;
Delay_12us();
}
}
void MeasureDistance()
{
unsigned int time=0;
TMOD=0x00;
TH1=0;
TL1=0;
SendWave();
TR1=1;
while((RX==1)&&(TF1==0));
TR1=0;
if(TF1==0)
{
time=TH1;
time=(time<<8)|TL1;
distance=time*0.0172;
}
else
{
TF1=0;
distance=999;
}
}
void Delay(unsigned char n)
{
while(n--)
{
DisplaySMG();
}
}
void main()
{
InitSystem();
while(1)
{
MeasureDistance();
Delay(5);
}
}
17. DAC转换
1、将 IIC 总线 的底层驱动代码文件正确移植到工程中。2、循环采样 PCF8591 的 AIN3 通道中可调电阻的信号,将采样结果转换成电压值,保留 2 位小数 ,显示在数码管右侧。3、将可调电阻的当前采样数据作为 PCF8591 的 D/A 转换 参数输出模拟电压。5、使用万用表测量 J3 的 19 和 20 引脚,即 OUT 和 GND ,比较可调电阻的采样电压和 DAC 输出的实际电压。
#include "reg52.h"
#include "iic.h"
sbit S4 = P3^3;
sbit S5 = P3^2;
int dat = 0;
unsigned char code SMGNodot[] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
unsigned char code SMGdot[] = {0xBF,0x86,0xDB,0xCF,0xE6,0xED,0xFD,0x87,0xFF,0xEF};
void SelectHC573(unsigned char channel)
{
switch(channel)
{
case 4:
P2 = (P2 & 0X1F) | 0X80;
break;
case 5:
P2 = (P2 & 0X1F) | 0XA0;
break;
case 6:
P2 = (P2 & 0X1F) | 0XC0;
break;
case 7:
P2 = (P2 & 0X1F) | 0XE0;
break;
case 0:
P2 = (P2 & 0X1F) | 0X00;
break;
}
}
void InitSystem()
{
SelectHC573(4);
P0 = 0XFF;
SelectHC573(5);
P0 = 0X00;
SelectHC573(7);
P0 = 0XFF;
SelectHC573(6);
P0 = 0XFF;
SelectHC573(7);
P0 = 0XFF;
SelectHC573(0);
}
void DisplaySMG_bit(unsigned char pos, unsigned char value)
{
SelectHC573(7);
P0 = 0xff;
SelectHC573(6);
P0 = 0x01 << pos;
SelectHC573(7);
P0 = value;
}
void DisplayAll_Off()
{
SelectHC573(7);
P0 = 0xff;
SelectHC573(6);
P0 = 0xff;
SelectHC573(7);
P0 = 0xff;
}
unsigned char Show[] = {0,0,0,0,0,0,0,0};
void CatchShow()
{
Show[7] = ~SMGNodot[dat % 10];
Show[6] = ~SMGNodot[(dat %100) / 10];
Show[5] = ~SMGNodot[dat / 100];
Show[4] = 0xff;
Show[3] = 0xff;
Show[2] = 0XFF;
Show[1] = 0xff;
Show[0] = 0xff;
}
void DelaySMG(unsigned int t)
{
while(t--);
}
void DisplayValue()
{
unsigned char i;
CatchShow();
for(i = 0; i < 8 ; i++)
{
DisplaySMG_bit(i,Show[i]);
DelaySMG(2000);
}
DisplayAll_Off();
}
void WriteDA(unsigned char dat)
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x40);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
void ScanKeys()
{
if(S4 == 0)
{
DisplayValue();
if(S4 == 0)
{
while(S4 == 0)
{
DisplayValue();
dat += 1;
if(dat > 255)
{
dat = 255;
}
}
}
}
if(S5 == 0)
{
DisplayValue();
if(S5 == 0)
{
while(S5 == 0)
{
DisplayValue();
dat -= 1;
if(dat < 0)
{
dat = 0;
}
}
}
}
}
void main()
{
InitSystem();
WriteDA(2*255/5);
while(1);
}
整体模块技能训练
// 头文件包含
# include "reg52.h"
# include "iic.h"
# include "onewire.h" //单总线头文件包含
# include "ds1302.h" //DS1032时钟模块包含
# include "intrins.h"
typedef unsigned char uchar;
typedef unsigned int uint;
sfr AUXR = 0x8e;
//按键引脚定义
sbit S4 = P3^3;
sbit S5 = P3^2;
sbit S6 = P3^1;
sbit S7 = P3^0;
//信号发送与接收
sbit TX = P1^0;
sbit RX = P1^1;
//数码管段码
uchar duanma[10] = {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
//无点断码
uchar duanmadot[10] = {0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10};
//DS1302 地址
uchar Writeaddr [7] = {0x80,0x82,0x84,0x86,0x88,0x8a,0x8c};
uchar Readaddr [7] = {0x81,0x83,0x85,0x87,0x89,0x8b,0x8d};
uchar Timer[7] = {0x00}; //时间地址自己写入
uchar rb2 = 0;
uint count = 0;
bit smg_f = 0;
//矩阵键盘引脚定义
sfr P4 = 0xC0;
sbit R1 = P3^0;
sbit R2 = P3^1;
sbit R3 = P3^2;
sbit R4 = P3^3;
sbit C1 = P4^4;
sbit C2 = P4^2;
sbit C3 = P3^5;
sbit C4 = P3^4;
//==================573锁存器与138译码器===========================
void SelectHC573(uchar n)
{
switch (n)
{
case 4:
P2 = (P2 & 0x1f) | 0x80;break;
case 5:
P2 = (P2 & 0x1f) | 0xa0;break;
case 6:
P2 = (P2 & 0x1f) | 0xc0;break;
case 7:
P2 = (P2 & 0x1f) | 0xe0;break;
case 0:
P2 = (P2 & 0x1f) | 0x00;break;
}
}
//============================================================
//====================LED=====================
//============================================================
//=====================系统初始化函数=============================
void InitSystem ()
{
SelectHC573(4);
P0 = 0xff;
SelectHC573(5);
P0 = 0x00;
SelectHC573(0);
}
//============================================================
//=========================PCF8591============================
void ReadRd1 ()
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x03);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
rb2 = IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
}
/
void PCFADC ()
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x43);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
rb2 = IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
}
void PCFDAC (uchar dat)
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x40);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
//============================================================
//=======================AT24C02==============================
uchar Read24c02 (uchar addr)
{
uchar temp;
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(addr);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
temp = IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return temp;
}
void Write24c02 (uchar addr,uchar dat)
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(addr);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
//============================================================
//=======================DS18B20==============================
void Read_Temp ()
{
uchar LSB;
uchar MSB;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
LSB = Read_DS18B20();
MSB = Read_DS18B20();
tem = (MSB << 8) | LSB;
if ((tem & 0xf800) == 0x0000)
{
tem = tem >> 4;
}
}
//============================================================
//=======================DS1302===============================
void Write_Timer ()
{
uchar i;
Write_Ds1302_Byte(0x8e,0x00);
for (i = 0;i <= 7;i++)
{
Write_Ds1302_Byte(Writeaddr[i],Timer[i]);
}
Write_Ds1302_Byte(0x8e,0x80);
}
void Read_Timer ()
{
uchar i;
for (i = 0;i <= 7;i++)
{
Timer[i] = Read_Ds1302_Byte(Readaddr[i]);
}
}
uchar BCD_add(uchar dat)
{
dat = dat + 1;
switch (dat)
{
case 10:dat = 16;break;
case 26:dat = 32;break;
case 42:dat = 48;break;
case 58:dat = 64;break;
case 74:dat = 80;break;
case 90:dat = 0;break;
}
return dat;
}
//??BCD??
uchar BCD_minus(uchar dat)
{
dat = dat - 1;
switch (dat)
{
case -1:dat =89;break;
case 79:dat = 73;break;
case 63:dat = 57;break;
case 47:dat = 41;break;
case 31:dat = 25;break;
case 15:dat = 9;break;
}
return dat;
}
//============================================================
//=========================NE555频率计=============================
void InitTime ()
{
TMOD = 0x16;
TH1 = (65535 - 100) / 256;
TL1 = (65535 - 100) % 256;
TH0 = 0xff;
TL0 = 0xff;
TR0 = 1;
TR1 = 1;
ET0 = 1;
ET1 = 1;
EA = 1;
}
void ServiceT0 () interrupt 1
{
f_c ++;
}
void ServiceT1 () interrupt 3
{
TH1 = (65535 - 100) / 256;
TL1 = (65535 - 100) % 256;
count++;
if (count >= 10000)
{
dat_f = f_c;
count = 0;
f_c = 0;
}
count++;
if (count >= 10000)
{
count = 0;
smg_f = ~smg_f;
}
pwm_c ++;
if (pwm_c >= pwm_t)
{
pwm_f = 0;
if (pwm_c >= 100)
{
pwm_c = 0;
pwm_f = 1;
}
}
}
//============================================================
//=======================中断服务函数=============================
void InitINT0 ()
{
IT0 = 1;
EX0 = 0;
EA = 1;
}
void ServiceINT0 () interrupt 0
{
//L8 = 0;
//Delay (60000);
//L8 = 1;
}
//============================================================
//========================串口通信======================== //=================================================
void InitUart ()
{
TMOD = 0x21;
TH1 = 0xfd;
TL1 = 0xfd;
TR1 = 1;
ES = 1;
EA = 1;
AUXR = 0x00;
SCON = 0x50;
}
void ServiceUart () interrupt 4
{
if (RI == 1)
{
command = SBUF;
RI = 0;
}
}
void SendByte (uchar dat)
{
SBUF = dat;
while (TI == 0);
TI = 0;
}
void SendString (uchar* addr)
{
uchar i = 0;
while (*addr != '\0')
{
SendByte(*addr);
addr = addr + 1;
}
}
void ExecuteCommand ()
{
if (command != 0x00)
{
switch (command & 0xf0)
{
case: 0xa0:
//
command = 0x00;
break;
case: 0xb0:
//
command = 0x00;
break;
//...
}
}
}
//============================================================
//====================数码管显示==========================
void Delay_SMG (uint t)
{
while (t--);
}
void ShowSMG_Bit (uchar pos,uchar dat)
{
SelectHC573(7);
P0 = 0xff;
SelectHC573(6);
P0 = 0x01 << pos - 1;
SelectHC573(7);
P0 = dat;
SelectHC573(0);
}
void All_SMG (uchar dat)
{
SelectHC573(6);
P0 = 0xff;
SelectHC573(7);
P0 = dat;
}
void ShowSMG ()
{
if (k4 == 0)
{
ShowSMG_Bit(1,0xc1);
Delay_SMG (500);
ShowSMG_Bit(6,duanmadot[dat_u / 100]);
Delay_SMG (500);
ShowSMG_Bit(7,duanma[(dat_u / 10) % 10]);
Delay_SMG (500);
ShowSMG_Bit(8,duanma[dat_u % 10]);
Delay_SMG (500);
}
else if (k4 == 1)
{
ShowSMG_Bit(1,0x8e);
Delay_SMG (500);
if (dat_f > 99999)
{
ShowSMG_Bit(3,duanma[(dat_f / 100000) % 10]);
Delay_SMG (500);
}
if (dat_f > 9999)
{
ShowSMG_Bit(4,duanma[(dat_f / 10000) % 10]);
Delay_SMG (500);
}
if (dat_f > 999)
{
ShowSMG_Bit(5,duanma[(dat_f / 1000) % 10]);
Delay_SMG (500);
}
if (dat_f > 99)
{
ShowSMG_Bit(6,duanma[(dat_f / 100) % 10]);
Delay_SMG (500);
}
if (dat_f > 9)
{
ShowSMG_Bit(7,duanma[(dat_f / 10) % 10]);
Delay_SMG (500);
}
ShowSMG_Bit(8,duanma[(dat_f / 1) % 10]);
Delay_SMG (500);
}
All_SMG(0xff);
}
//============================================================
//==================按键延时========================
void DelayKey (uchar t)
{
while (t--);
}
void ScanKey ()
{
if (S4 == 0)
{
DelayKey (100);
if (S4 == 0)
{
while (S4 == 0)
{
}
}
}
if (S5 == 0)
{
DelayKey (100);
if (S5 == 0)
{
while (S5 == 0)
{
}
}
}
if (S6 == 0)
{
DelayKey (100);
if (S6 == 0)
{
while (S6 == 0)
{
}
}
}
if (S7 == 0)
{
DelayKey (100);
if (S7 == 0)
{
while (S7 == 0)
{
}
}
}
}
//============================================================
//====================矩阵键盘==========================
void Scanjuzhenjianpan (void)
{
R1 = 0;
R2 = R3 = R4 = 1;
C1 = C2 = C3 = C4 = 1;
if (C1 == 0)
{}
else if (C2 == 0)
{}
else if (C3 == 0)
{}
else if (C4 == 0)
{}
R2 = 0;
R1 = R3 = R4 = 1;
C1 = C2 = C3 = C4 = 1;
if (C1 == 0)
{
}
else if (C2 == 0)
{}
else if (C3 == 0)
{}
else if (C4 == 0)
{}
}
//============================================================
//==========================???=============================
void Delay12us()
{
unsigned char i;
_nop_();
_nop_();
i = 33;
while (--i);
}
void SendWave () //40KHZ,8?????,TX??
{
uchar i;
for (i = 0;i < 8;i++)
{
TX = 1;
Delay12us();
TX = 0;
Delay12us();
}
}
void DistanceMeasure ()
{
TMOD &= 0x0f;
TH1 = 0x00;
TL1 = 0x00;
SendWave ();
TR1 = 1;
while ((RX == 1) && (TF1 == 0));
TR1 = 0;
if (TF1 == 1)
{
distance = 999;
TF1 = 0;
}
else
{
time = (TH1 << 8) | TL1;
distance = time * 0.0172;
}
}
void Delay (uchar n)
{
while (n--)
{
ShowSMG ();
}
}
//=========================================================
//====================主函数========================
void main ()
{
while (1)
{
Delay(10);
}
}
/
——————————————————分界线————————————————
░░░░░░░░░▄▄
░░░░░░░░░█░█
░░░░░░░░░█░█
░░░░░░░░█░░█
░░░░░░░█░░░█
█████▄▄█░░░████
▓▓▓▓█░░░░░░░░░░░░█
▓▓▓▓█░░░░░░░░░░░░█
▓▓▓▓█░░░░░░░░░░░░█
▓▓▓▓█░░░░░░░░░░░░█
▓▓▓▓█░░░░░░░░░░░░█
▓▓▓▓█████░░░░░░░░
████▀░░░▀▀██████▀
------------------------------------------->> To Be Continue