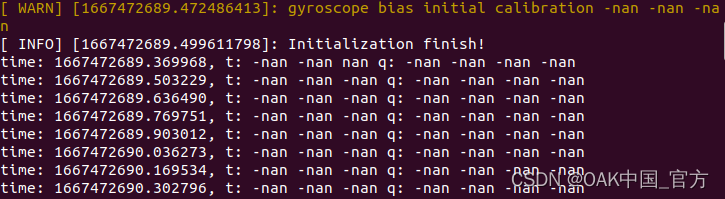
报错提示:
用OAK-D跑vins-fusion,陀螺仪偏置初始校准失败,请问怎么解决?
解决方法:
1.是否根据我们的标定教程正确操作的?
2.配置文件是否正确?
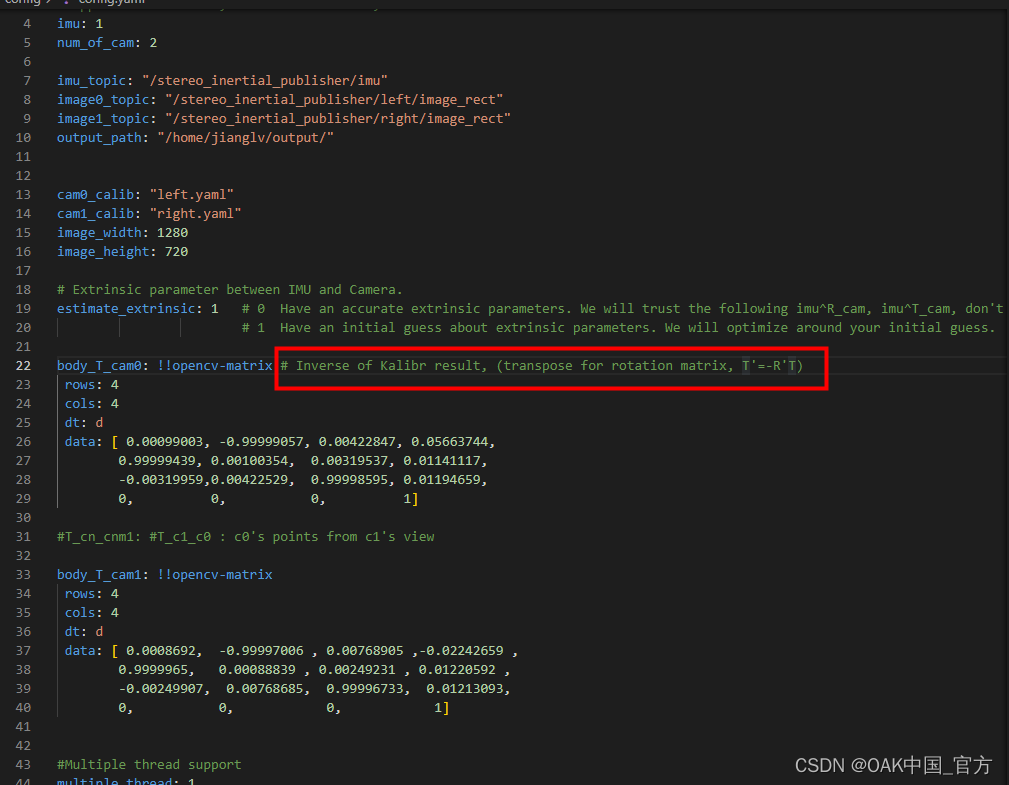
这里需要的是结果的逆,而不是直接把校准结果填进去。
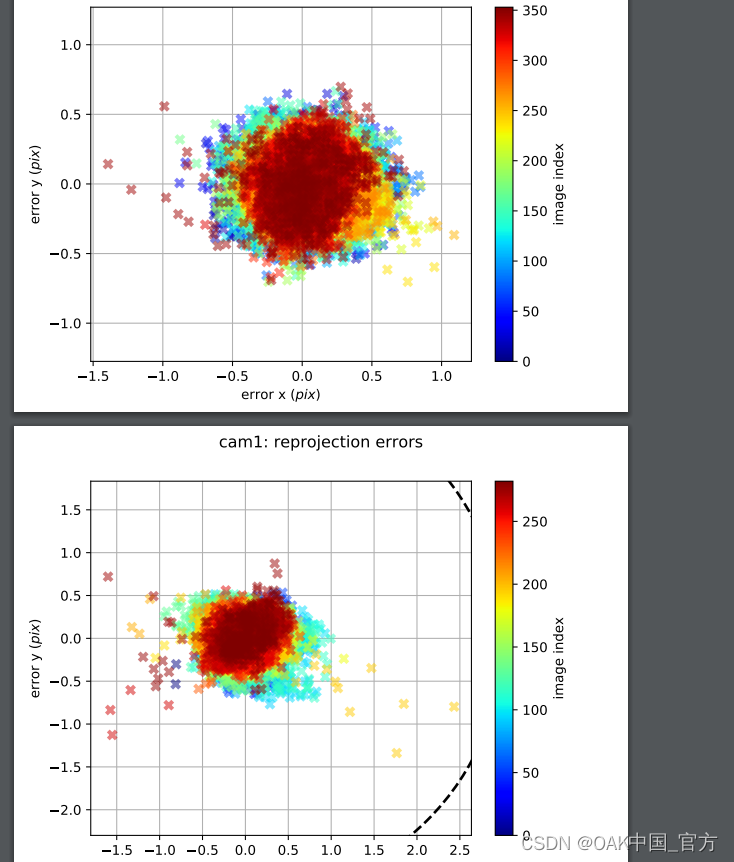
3.误差是不是比较大?如果误差大,请尝试重新校准控制在比较小的范围。(下图是误差小的情况)
4.是否根据我们官网的vins fusion教程正确操作的?我们可能会不定期修改教程,请注意在官网查看最新内容。
小技巧:我们的开源生态非常丰富,API及项目更新速度比较快,出现报错学会追踪溯源、多多搜索会帮助你快速定位问题哦!
其他常见报错:
请查看
OAK中国
| OpenCV AI Kit在中国区的官方代理商和技术服务商
| 追踪AI技术和产品新动态
戳「+关注」获取最新资讯↗↗