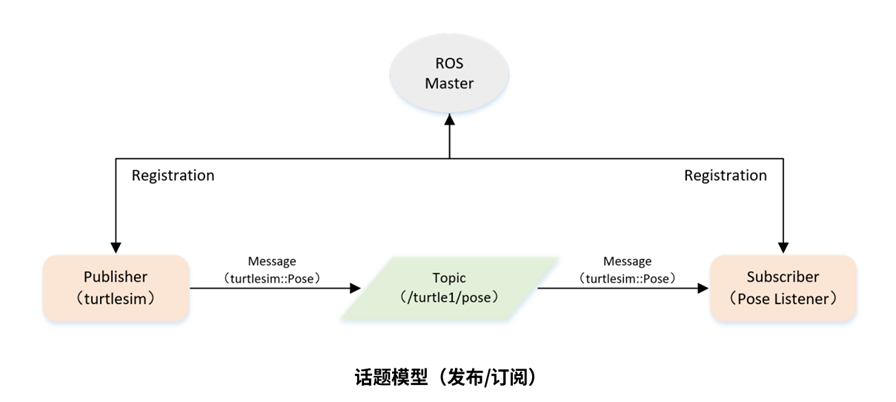
发布者Publisher的编程实现——小乌龟实现匀速跑圈案例
猜你喜欢
转载自blog.csdn.net/weixin_47723732/article/details/127419610
今日推荐
周排行