合适的工业相机和镜头决定了机器视觉成像质量。那在种类繁多的工业相机和镜头中,如何合理地选择工业相机和镜头的搭配呢?
一、工业相机分类
主要以下几种分类:
| 分类方式 | 类型1 | 类型2 |
| 芯片类型 | CCD相机 | CMOS相机 |
| 传感器结构特征 | 线阵相机 | 面阵相机 |
| 色彩类型 | 黑白相机 | 彩色相机 |
| 曝光方式 | Rolling(卷帘)相机 | Global(全局)相机 |
| 输出信号 | 模拟相机 | 数字相机 |
| 靶面大小 | 1、2/3、1/2等等 | |
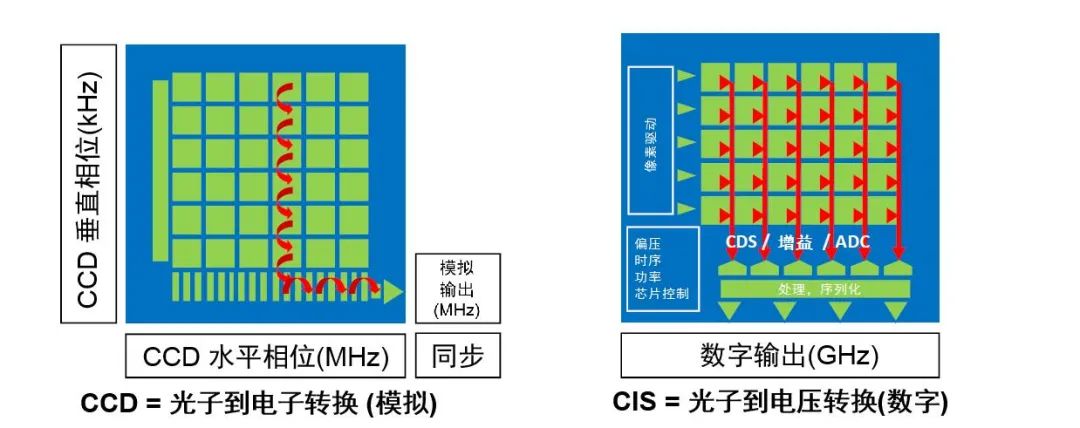
1.1 芯片类型
CCD就像传统相机的底片一样的感光系统,是感应光线的电路装置,你可以将它想象成一颗颗微小的感应粒子,铺满在光学镜头后方,当光线与图像从镜头透过、投射到CCD表面产生电流,将感应到的内容转换成数码资料储存起来。CCD像素数目越多、单一像素尺寸越大,收集到的图像就会越清晰。
CMOS则是金属氧化物半导体组件,它和CCD一样负责将光线转变成电荷,只是工艺不同。
CCD的优势在于成像质量好,但是制造工艺复杂,成本高昂,且耗电高,应用于摄影摄像方面。在相同分辨率下,CMOS价格比CCD便宜,图像传输速度更快,但图像质量相比CCD来说要低一些。CMOS影像传感器相对CCD具有耗电低的优势,加上随着工艺技术的进步,CMOS的画质水平也不断地在提高,所以目前工业相机几乎全部使用CMOS传感器。
1.2 传感器结构特征
面阵相机的像元是阵列排列,阵列中的每个感光单元对应一个像素,被拍摄的目标的一个面被成像,目标与相机之间可以是静止的,也可以是相对运动的。面阵相机可以在短时间内曝光、一次性获取完整的目标图像,具有测量图像直观的优势,常应用于测量目标物体的形状、尺寸与温度等信息。
面阵相机应用面较广,如面积、形状、尺寸、位置,甚至温度等的测量。

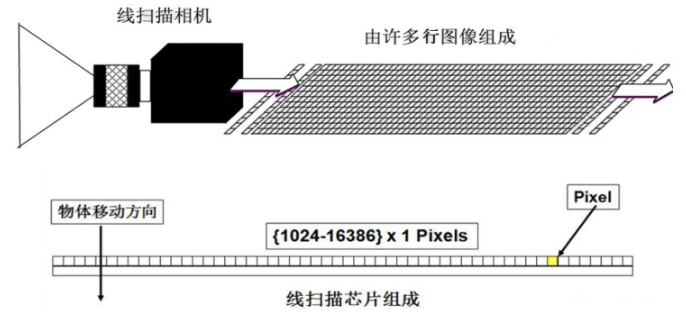
线阵相机的感光单元排列是一维的,每次曝光仅是目标上的一条线被成像,形成一行图像,随着目标物体与相机之间的相对运动,相机连续曝光,最后形成一幅二维图像。线阵相机幅面宽,像元尺寸较灵活,行频高,常应用于一维动态目标的测量,如需要极大的视野或极高的精度或被测视野为细长的带状,多用于滚筒上检测的问题。
线阵相机主要应用于检测连续的材料,例如金属、塑料、纸和纤维等。被检测的物体通常匀速运动 , 利用一台或多台相机对其逐行连续扫描 , 以达到对其整个表面均匀检测。可以对其图象一行一行进行处理 , 或者对由多行组成的面阵图象进行处理。另外线阵相机非常适合测量场合,这要归功于传感器的高分辨率,它可以准确测量到微米。
1.3 色彩类型
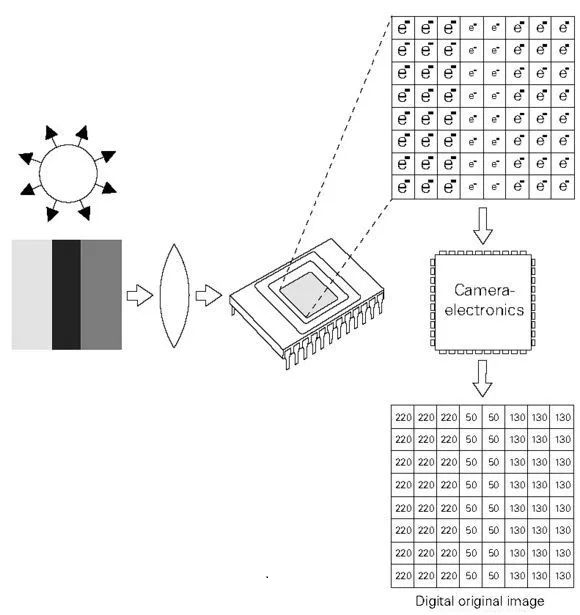
黑白相机输出的是没有颜色信息的灰度信号值。
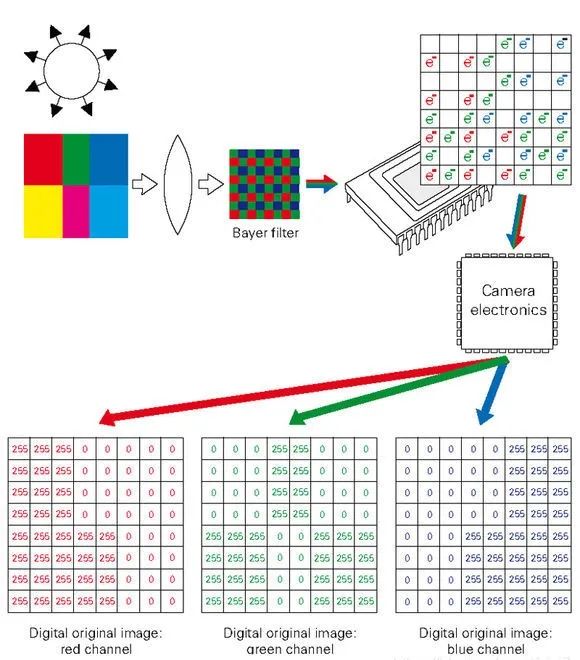
彩色相机按照特定结构像元感应色彩的排列,利用一种叫做Bayer插值算法,就可解读出单个像元所对应的其他2个颜色信息,进而得到全彩色像素信息,所以这样的工业相机也被称为Bayer格式彩色相机。
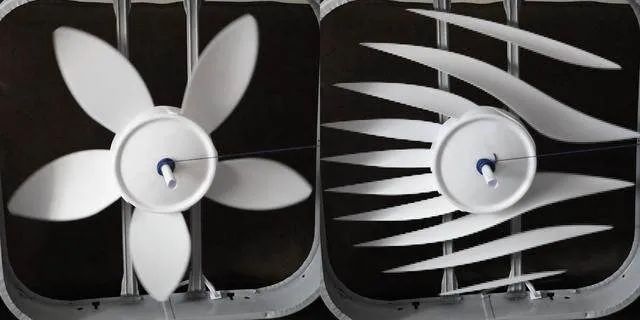
1.4 曝光方式
全局曝光的方式比较简单。也就是说光圈打开后,整个图像芯片同时曝光。因此,曝光时间与机械的开关速度有关。与机械运动相关,所以,存在理论上的最小曝光时间。
卷帘曝光的方式可能与卷帘的概念相关。此种曝光方式是当光圈打开后,还存在具有一定间隔的卷帘来控制传感器的曝光时间。曝光时间的长短完全取决于卷帘的开口大小与卷帘的运动速度。也就是说,卷帘运动得越快,卷帘间距越小,其传感器的曝光时间越小。因此,卷帘曝光方式能够具有更小的曝光时间。
全局曝光和卷帘曝光拍摄高速运动物体时的效果对比图:
1.5 输出信号
模拟工业相机输出的是模拟信号,其需要借助图像采集卡将模拟信号转化为数字信号传输给监视器或显示器等设备。对于常见的模拟工业相机来说,其主要以隔行扫描获取图像,且一般模拟工业相机的帧率和分辨率是固定的,在工业现场容易受到现场其他设备的电磁信号的干扰,影响其传输效果,从而对成像产生影响,所以国内企业已多数转用工业数字相机。
工业数字相机其内部有一个 A/D 转换器,数据以数字形式传输,能够直接显示在电脑或电视屏幕上,因而数字输出相机可以避免传输过程的图像衰减或噪声。数字相机图像质量好,分辨率可选择范围大,帧速高,是做图像处理和视觉检测项目的优选。
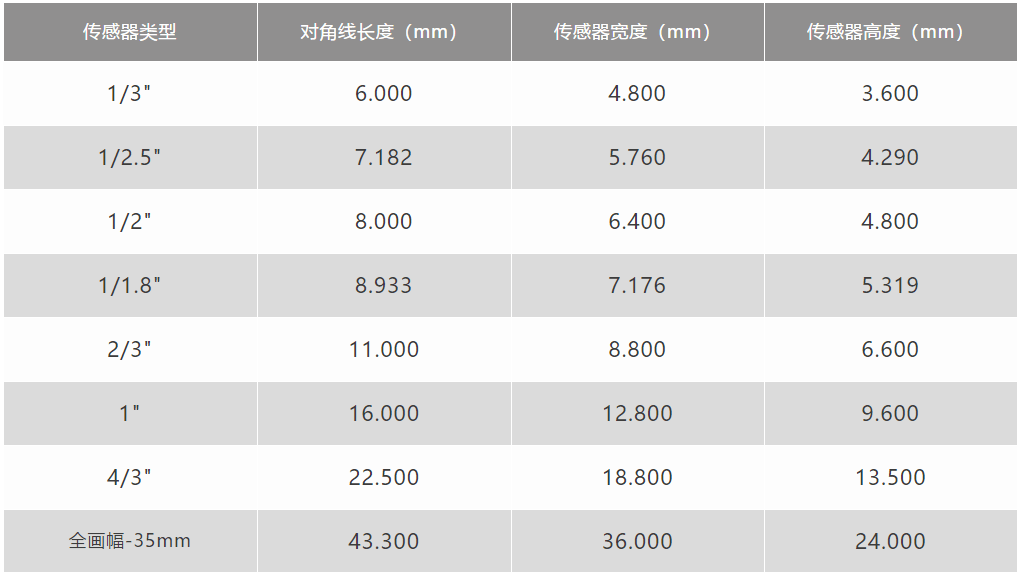
1.6 靶面大小
靶面大小就是相机感光元器件对角线的尺寸。
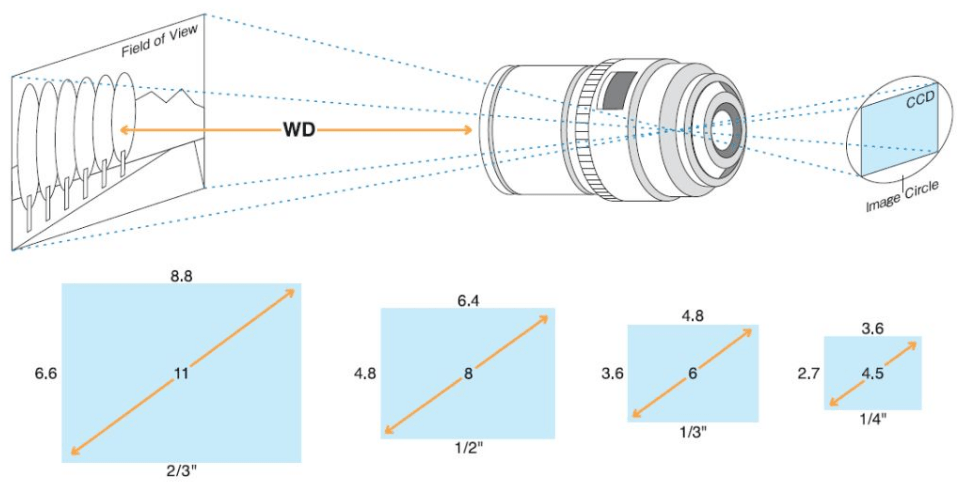
各种靶面的长度:
二、工业镜头
镜头其功能就是光学成像。镜头是机器视觉系统中的重要组件, 对成像质量有着关键性的作用, 它对成像质量的几个主要指标都有影响,包括:分辨率、对比度、景深及各种像差等。
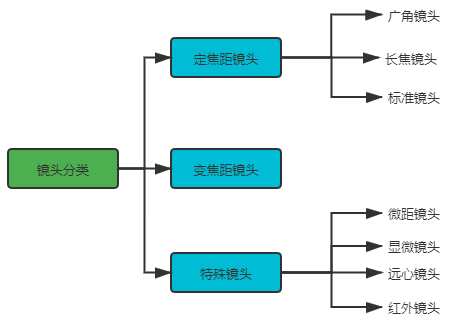
2.1 镜头分类
-
定焦距镜头:镜头的焦距不可以调节,镜头视角固定,光圈可以调节。
-
变焦距镜头:镜头的焦距可以调节,镜头的视角、视野可变。
-
特殊镜头:用于特殊场合的镜头。
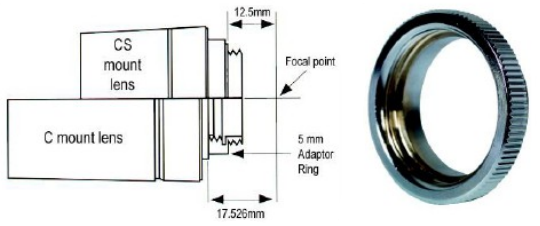
2.2 接口类型
物镜的接口尺寸是有国际标准的,共有三种接口型式,即F型、C型、CS型。F型接口是通用型接口,一般适用于焦距大于25mm的镜头;而当物镜的焦距约小于25mm时,因物镜的尺寸不大,便采用C型或CS型接口。
C与CS接口的区别在于镜头与摄像机接触面至镜头焦平面(摄像机CCD光电感应器应处的位置)的距离不同,C型接口此距离为17.5mm.,CS型接口此距离为12.5mm.。
C型镜头与C型摄像机,CS型镜头与CS型摄像机可以配合使用。C型镜头与CS型摄像机之间增加一个5mm的C/CS转接环可以配合使用。CS型镜头与C型摄像机无法配合使用。
2.3 基本参数
(1) 焦距
焦距是镜头的重要参数之一,光学系统的焦距指的是主点到焦点的距离。焦距直接决定了像与实际物体直接的比例,在物距一定的情况下,要想得到大比例的像,就要选用长焦距的镜头;反之,短焦距的镜头可以得到小比例的像。
较常见的镜头焦距有8mm,15mm,24mm,28mm,35mm,50mm,85mm,105mm,135mm,200mm,400mm,600mm,1200mm等,还有长达2500mm超长焦望远镜头。
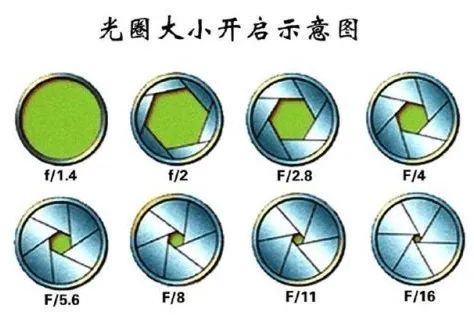
(2) 光圈系数(F值)
镜头照相机的光圈是由一系列叶片组成,通过一定的联动作用,在中央形成一个可变大小的圆形孔。
孔的大小决定了此时进光量的多少。好比你站在门内,门外有一盏灯。你打开一道门缝,这时打到你脸上的光只有一道缝那么多;你把门全部打开,这时候光全部打到你身上。
光圈系数,即F值即是用来表示光圈大小的参数。它等于镜头焦距f和通光孔径D之比。光圈开大一级,要求通光的面积增加一倍,所以通光的直径只能增加√2 倍=1.4倍。
因此常用光圈值为F/1、F/1.4、F/2、F/2.8、F/4、F/5.6、F/8、F/11、F/16、F/22、F/32、F/44、F/64。
F/x.x越大,光圈越小,进光量越少,成像速度越慢。
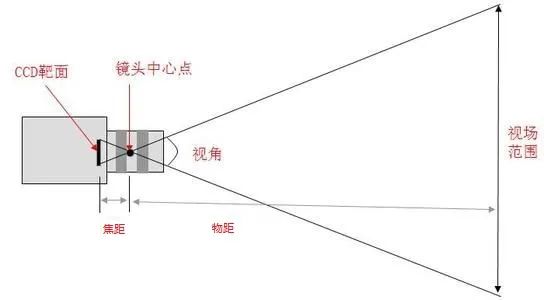
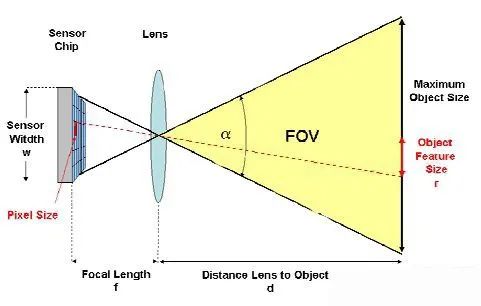
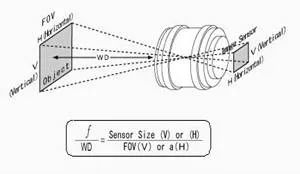
(3) 视场角(FOV:Field of view)
镜头的视场角决定了被拍摄景物的范围,视场角越大,视野就越大。视场角与焦距的关系如下:
长焦距的镜头的视场角较小,能对远处景物拍摄获取较大的像,适于远距离摄影;短焦距的镜头的视场角较大,能拍摄近处较大范围内的景物,又称之为广角镜头;介于二者之间,焦距属于中等,约等于幅面对角线长度的镜头,称之为标准镜头。
(4) 景深 (depth of field,DOF)
当把物镜调焦到某一摄影对象时,在该对象的前后能在像面上呈清晰像的范围,称为景深。下图中的景深为:。
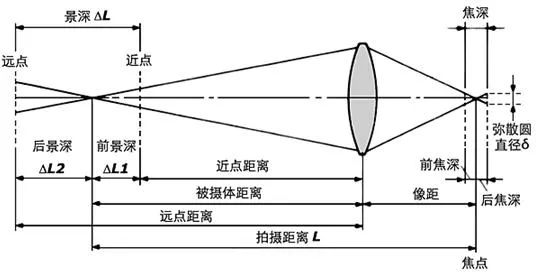
影响景深的因素很多,其中包括焦距、光圈和拍摄距离:
焦距:镜头焦距越长,景深越小;焦距越短,景深越大。
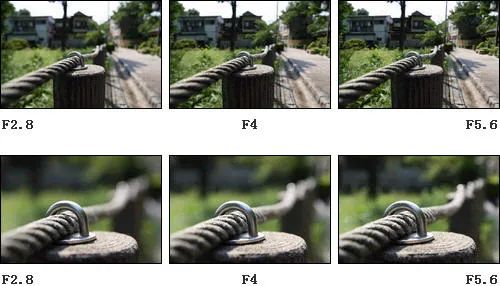
光圈:光圈越大,景深越小;光圈越小,景深越大。
拍摄距离:拍摄距离越远,景深越大;拍摄距离越近,景深越小。
如下图不同光圈有不同景深。
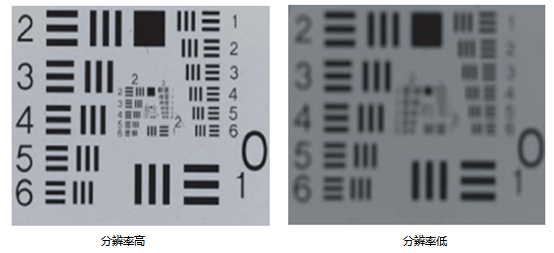
(5) 分辨率(resolution)
分辨率是指镜头清晰地再现被摄景物纤微细节的能力,是评价镜头质量的一个重要参数。显然分辨率越高的镜头,所拍摄的影像越清晰细腻。它的优点是可以量化,用数据表示(图像分辨率一般以量化图像传感器即空间频率对比度CTF(对比传递函数)来衡量),使结果更直观、更科学、更严密。
分辨率定义为在像面处镜头在单位毫米内能够分辨开的黑白相间的条纹对数,如下图所示:

分辨率为1/2d,其中,d为线宽。分辨率的单位为lp/mm(线对/毫米)。
一般使用的分辨率公式:
分辨率(ε)=0.61×λ/N.A.(Reyleigh公式)
λ:使用的波长或辐射(λ=0.55µm用于可见光)
N.A.:物镜数值孔径
在实际工业应用中,系统使用面阵或线阵传感器作为成像器件,因此系统的分辨率通常也会受到成像传感器中像元分辨率的限制。像元分辨率定义为单位毫米内像素单元数的一半,即=1/2P,其中p为像素单元的尺寸大小。例如一个CCD的像元尺寸大小为5×5微米,则像元分辨率则为:=1/(2*0.005)=100(lp/mm)。传感器的像元分辨率限制了系统的最高分辨率,即使镜头的分辨率再高,系统也不可能分辨高于像元分辨率的细节。
三、选择合适的相机与镜头
首先,要确定工业相机的传输接口,黑白还是彩色,卷帘还是全局等这些可以参考前面的介绍选择合适的相机。
其次就是选择多少分辨率,靶面尺寸,镜头焦距等这里就详细介绍。
确定所要达到的视野范围(FOV)和工作距离(WD),然后根据这两个要求和已知的靶面尺寸计算出工业镜头的焦距(f)。其计算公式为:
焦距f = WD × 靶面尺寸( H or V) / FOV( H or V)
3.1 相机分辨率选择
案例一需求如下:
-
待检测物体大小:10mm x 7mm;
-
检测精度:0.01mm;
-
视野范围:12mm x 9mm;
分析计算步骤:
-
相机最小分辨率=(12/0.01)*(9/0.01)=1200*900≈108万像素;
-
相机分辨率至少为108万像素;
-
可以选用130万像素相机(1280*960);
-
为减小边缘提取时的像素偏移带来的误差,提高系统的精准度和稳定性,实际使用中一般用2-3个像素对应一个最小缺陷或特征;
-
则相机分辨率=108*3≈324万;
-
最终选型320万像素相机(2048*1536)
3.2 镜头像面尺寸
为保证画面整体的可应用性,选用镜头的像面尺寸应大于相机芯片的对角线尺寸,否则会出现边缘暗角/黑角等情况,影响使用。
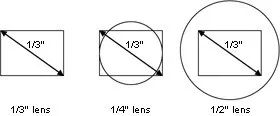
如图,1/3靶面的sensor 传感器,最合适的肯定是配1/3像面的镜头。左边的图。
如果配1/4像面的镜头,中间的图。镜头面积小于传感器,sensor上的四周会有光线盲点,所呈现出来的图像 四周就会是黑的,俗称暗角,黑影。
如果配1/2像面镜头,镜头覆 关于镜头和相机的选择实际还有好多因素如景深、畸变、接口等等,都要需要我们不断的学习和摸索。样虽然不会像中间的图一样 产生暗角,但明显镜头的性能被浪费了,这种情况其实也不可取。
3.2 镜头焦距选择
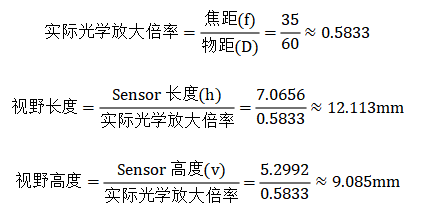
根据被摄物体的大小我们可以得到视野的大致范围,进而得到物像关系,这里我们用光学放大倍率来表示。

案例二需求如下:
-
视野范围:12mm*9mm;
-
镜头前端距离被测物体距离:60mm;
-
选用相机:320万像素相机(分辨率2048*1536,像元尺寸3.45um)
分析计算步骤:
(1)Sensor长宽尺寸:
Sensor长度=2048*3.45/1000=7.0656mm
Sensor高度=1536*3.45/1000=5.2992mm
(2)

(3)

(4)
(5)

(6)
选用35mm镜头,搭配320万相机,可以达到12.113mm x 9.085mm的视野,单像素精度5.9μm;
标准35mm镜头无法满足60mm近工作距,可使用接圈解决。
关于镜头和相机的选择实际还有好多因素如景深、畸变、接口等等,都需要我们不断的学习和摸索。
