假设兄弟们之前的内容已经看完了,训练也有自己的数据集了,也训练出了自己的模型,所以我们接下就来看看模型的效果,我们这里没有任何指标性的数据,仅仅是看看效果,别杠我啊,兄弟们。
那就先上两张效果图吧.这是某年的全名星东西部的照片,东部有我喜欢的罗斯。西部有大家喜欢的KOBE(btw,我有一个科比亲笔签名的篮球,还是2001总决赛的球,听说老值钱了。)看到这个图,估计大家就知道我肯定是上年纪了,哈哈哈哈。


可以看到,检测效果还是可以的,虽然不完美,因为训练的时间,样本增强,以前损失函数都没有搞,所以这种效果我也是能够接受的 。
好了,上代码。
4.推理
import torch
import torchvision.transforms as transform
import cv2
import numpy
import config
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class Inference:
def __init__(self, model_path):
self.net = torch.load(model_path).to(device)
self.transform = transform.Compose([transform.ToTensor(), transform.Normalize([0.5], [0.5])])
self.resize_image_size = config.resize_image_size
self.net.eval()
self.conf_treshold = 0.5
self.iou_threshold = 0.5
def test(self, img):
ori_size = img.shape
resize_img = cv2.resize(img, (self.resize_image_size[1], self.resize_image_size[0]))
img_tensor = self.transform(resize_img).unsqueeze(0).to(device)
predict_tensor_32, predict_tensor_16, predict_tensor_8 = self.net(img_tensor)
# print(predict_tensor_32.shape,predict_tensor_16.shape,predict_tensor_8.shape)
predict_boxes = self.get_boxes(predict_tensor_32, predict_tensor_16,
predict_tensor_8) # [-1,6] 6=[cls_id,conf,xmin,ymin,xmax,ymax] 此时的坐标还是resize之后的坐标
print(predict_boxes)
if predict_boxes.size(0) == 0:
return []
after_nms_boxes = self.NMS(predict_boxes, self.iou_threshold)
print(after_nms_boxes)
change_coor_boxes = self.change_coordinate(after_nms_boxes, ori_size, config.resize_image_size)
return change_coor_boxes
def change_coordinate(self, after_nms_boxes, ori_size, resize_image_size):
boxes = []
h_ratio = ori_size[0] / resize_image_size[0]
w_ratio = ori_size[1] / resize_image_size[1]
for i in after_nms_boxes:
box = i.int().cpu().numpy().tolist()
box[2] = int(box[2] * w_ratio)
box[4] = int(box[4] * w_ratio)
box[3] = int(box[3] * h_ratio)
box[5] = int(box[5] * h_ratio)
boxes.append([box[0], box[2], box[3], box[4], box[5]])
return boxes
def get_boxes(self, predict_tensor_32, predict_tensor_16, predict_tensor_8):
"""
suppose input image size = [640,640]
:param predict_tensor_32: shape=[batch,21,20,20] stride = 32的featuremap
:param predict_tensor_16: shape=[batch,21,20,20] stride = 16的featuremap
:param predict_tensor_8: shape=[batch,21,20,20] stride = 8的featuremap
:return:
"""
boxes_32 = self.get_featuremap_box(predict_tensor_32, 32, self.conf_treshold)
boxes_16 = self.get_featuremap_box(predict_tensor_16, 16, self.conf_treshold)
boxes_8 = self.get_featuremap_box(predict_tensor_8, 8, self.conf_treshold)
boxes = torch.cat((boxes_32, boxes_16, boxes_8), dim=0).cpu()
boxes[boxes <= 0] = 0
return boxes
def NMS(self, lists, treshold):
values, index = (-lists[:, 1]).sort(0)
boxes = lists[index].float()
fal_box = torch.tensor([]).view(-1, 6)
while boxes.shape[0] > 1: # 多于一个框
max_score_box = boxes[0].view(-1, 6)
rest_boxes = boxes[1:].view(-1, 6)
fal_box = torch.cat((fal_box, max_score_box), dim=0)
boxes = rest_boxes[self.IOU(max_score_box[:, 2:], rest_boxes[:, 2:]) < treshold] # 小于阈值的保留
if boxes.shape[0] > 0: # 只有一个框的情况
fal_box = torch.cat((fal_box, boxes[0].view(-1, 6)), dim=0)
return fal_box
def IOU(self, max_score_box, rest_boxes):
# max_score_box = [xmin,ymin,xmax,ymax,score]
max_score_area = (max_score_box[:, 2] - max_score_box[:, 0]) * (
max_score_box[:, 3] - max_score_box[:, 1]) # 最大值框的面积
rest_area = (rest_boxes[:, 2] - rest_boxes[:, 0]) * (rest_boxes[:, 3] - rest_boxes[:, 1]) # 剩下的框的面积
x1 = torch.max(max_score_box[:, 0], rest_boxes[:, 0])
y1 = torch.max(max_score_box[:, 1], rest_boxes[:, 1])
x2 = torch.min(max_score_box[:, 2], rest_boxes[:, 2])
y2 = torch.min(max_score_box[:, 3], rest_boxes[:, 3])
w = torch.max(torch.tensor([0.]), x2 - x1)
h = torch.max(torch.tensor([0.]), y2 - y1)
intersection = w * h # 交集
union = rest_area + max_score_area - intersection # 并集
iou = intersection / union
return iou
def get_featuremap_box(self, featuremap, stride, threshold, anchor_num=3):
"""
:param featuremap: eg:[batch,21,20,20]
:param anchor_num: anchor的个数
:return:
"""
featuremap = featuremap.view(featuremap.size(0), anchor_num, -1, featuremap.size(2),
featuremap.size(3)) # [batch,3,7,20,20]
featuremap = featuremap.permute(0, 3, 4, 1, 2) # [batch,20,20,3,7]
batch, h, w, anchor, channel = featuremap.size()
featuremap = featuremap[0] # 去掉batch维度 [20,20,3,7]
featuremap[:, :, :, 0] = featuremap[:, :, :, 0] # 置信度先sigmoid
obj_mask = torch.gt(featuremap[:, :, :, 0], threshold) # [20,20,3] 里面只有0,1
featuremap_coordinate = torch.nonzero(
obj_mask).float() # [-1,3] 里面是不为0的坐标点 -1代表有几个框 3代表[y_index,x_index,anchor_index]
# confidence and offset and w h
confidence = featuremap[:, :, :, 0][obj_mask].view(-1, 1).float()
offset_x = featuremap[:, :, :, 1][obj_mask].view(-1, 1).float()
offset_y = featuremap[:, :, :, 2][obj_mask].view(-1, 1).float()
w = torch.exp(featuremap[:, :, :, 3][obj_mask].view(-1, 1).float())
h = torch.exp(featuremap[:, :, :, 4][obj_mask].view(-1, 1).float())
# 类别cls
if featuremap_coordinate.size(0) == 0:
# 代表没有框
cls = torch.tensor([]).view(featuremap_coordinate.size(0), 0).to(device)
return torch.tensor([]).view(-1, 6).to(device)
else:
cls = torch.tensor([]).view(featuremap_coordinate.size(0), -1).to(device)
for i in range(int(channel - 5)):
cl = featuremap[:, :, :, 5 + i][obj_mask].view(-1, 1).float()
cls = torch.cat((cls, cl), 1)
_, cls_id = torch.max(cls, dim=1)
cls_id = cls_id.view(-1, 1).float()
# 转换wh坐标(resize之后)
selected_anchor = torch.tensor(config.ANCHORS_GROUP[stride])[
featuremap_coordinate[:, 2].int().cpu().numpy().tolist()]
after_resize_wh = selected_anchor.to(device).float() * torch.cat((w, h), dim=1) # [-1,2] [w,h]
# 转换坐标(resize之后)
xmin = (featuremap_coordinate[:, 1].view(-1, 1) + offset_x) * stride - (after_resize_wh[:, 0].view(-1, 1) / 2)
ymin = (featuremap_coordinate[:, 0].view(-1, 1) + offset_y) * stride - (after_resize_wh[:, 1].view(-1, 1) / 2)
xmax = xmin + after_resize_wh[:, 0].view(-1, 1)
ymax = ymin + after_resize_wh[:, 1].view(-1, 1)
finall_box = torch.cat((cls_id, confidence, xmin, ymin, xmax, ymax), dim=1)
return finall_box
def draw_box(img, boxes,img_name):
for i in boxes:
cv2.rectangle(img, (i[1], i[2]), (i[3], i[4]), color=(0, 0, 255),thickness=3)
cv2.imwrite('./result/'+img_name,img)
# cv2.imshow('demo', cv2.resize(img,(640,640)))
# cv2.waitKey()
return img
if __name__ == '__main__':
model_path = './weights/yolov3_net.pth'
img_folder = './sample'
Model = Inference(model_path)
import os
for i in os.listdir(img_folder):
img_path = os.path.join(img_folder,i)
img = cv2.imread(img_path)
boxes = Model.test(img)
img = draw_box(img, boxes,i)
看到这么长。你先不要退缩,训练的你如果看懂了的话,推理就不会特别难,推理就是训练数据准备的逆过程。我们来一步一步的看
4.1 初始化函数
def __init__(self, model_path):
"""
:param model_path: 训练好的模型的路径
"""
self.net = torch.load(model_path).to(device) # 加载训练好的模型
self.transform = transform.Compose([transform.ToTensor(), transform.Normalize([0.5], [0.5])]) # 数据转化对象初始化
self.resize_image_size = config.resize_image_size # 定义resize图片的大小
self.net.eval() # 模型开到推理模式
self.conf_treshold = 0.5 # 定义置信度的阈值
self.iou_threshold = 0.5 # 定义iou的阈值之前有人说我不谢代码注释,今天它来了。
4.2 推理函数
def test(self, img):
"""
:param img: opencv读取的BGR通道的图片
:return: 目标的坐标值
"""
ori_size = img.shape # 获取原图的高/宽/channel值
resize_img = cv2.resize(img, (self.resize_image_size[1], self.resize_image_size[0])) # resize 图片
img_tensor = self.transform(resize_img).unsqueeze(0).to(device) # 对图片进行预处理,再增加一个batch的维度
predict_tensor_32, predict_tensor_16, predict_tensor_8 = self.net(img_tensor) # 图片放入加载好的模型中
# print(predict_tensor_32.shape,predict_tensor_16.shape,predict_tensor_8.shape)
predict_boxes = self.get_boxes(predict_tensor_32, predict_tensor_16,
predict_tensor_8) # [-1,6] 6=[cls_id,conf,xmin,ymin,xmax,ymax] 此时的坐标还是resize之后的坐标
# 调用自定义的get_boxes函数,获取推理的3个featuremap
# print(predict_boxes)
if predict_boxes.size(0) == 0:
return []
after_nms_boxes = self.NMS(predict_boxes, self.iou_threshold) # 对得到的结果进行NMS操作
# print(after_nms_boxes)
change_coor_boxes = self.change_coordinate(after_nms_boxes, ori_size, config.resize_image_size) # 把得到的坐标转换为原图对应的坐标
return change_coor_boxes4.2.1 get_boxes函数
def get_boxes(self, predict_tensor_32, predict_tensor_16, predict_tensor_8):
"""
suppose input image size = [640,640]
:param predict_tensor_32: shape=[batch,21,20,20] stride = 32的featuremap
:param predict_tensor_16: shape=[batch,21,20,20] stride = 16的featuremap
:param predict_tensor_8: shape=[batch,21,20,20] stride = 8的featuremap
:return:
"""
boxes_32 = self.get_featuremap_box(predict_tensor_32, 32, self.conf_treshold)
boxes_16 = self.get_featuremap_box(predict_tensor_16, 16, self.conf_treshold)
boxes_8 = self.get_featuremap_box(predict_tensor_8, 8, self.conf_treshold)
boxes = torch.cat((boxes_32, boxes_16, boxes_8), dim=0).cpu()
boxes[boxes <= 0] = 0
return boxes这个函数其实就是在调用另一个get_featuremap_box这个自定义的函数,所以我们来看这个函数就行了,如果训练是数据准备是编码过程,这个就是解码过程了
def get_featuremap_box(self, featuremap, stride, threshold, anchor_num=3):
"""
:param featuremap: 单个featuremap eg 维度 [batch,21,20,20]
:param stride: 下采样的倍数
:param threshold: 置信度的阈值
:param anchor_num: anchor的数量
:return:
"""
featuremap = featuremap.view(featuremap.size(0), anchor_num, -1, featuremap.size(2),
featuremap.size(3)) # [batch,3,7,20,20] # 变化维度
featuremap = featuremap.permute(0, 3, 4, 1, 2) # [batch,20,20,3,7] # 交换维度
batch, h, w, anchor, channel = featuremap.size() # 获取各个维度的值
featuremap = featuremap[0] # 去掉batch维度 [20,20,3,7]
featuremap[:, :, :, 0] = featuremap[:, :, :, 0] # 置信度
obj_mask = torch.gt(featuremap[:, :, :, 0], threshold) # [20,20,3] 里面只有0,1 # 比较置信度和置信度的阈值
featuremap_coordinate = torch.nonzero(
obj_mask).float() # [-1,3] 里面是不为0的坐标点 -1代表有几个框 3代表[y_index,x_index,anchor_index]
# confidence and offset and w h
confidence = featuremap[:, :, :, 0][obj_mask].view(-1, 1).float() # 获取置信度
offset_x = featuremap[:, :, :, 1][obj_mask].view(-1, 1).float() # 获取x的偏移值
offset_y = featuremap[:, :, :, 2][obj_mask].view(-1, 1).float() # 获取y的偏移值
w = torch.exp(featuremap[:, :, :, 3][obj_mask].view(-1, 1).float()) # 目标的宽
h = torch.exp(featuremap[:, :, :, 4][obj_mask].view(-1, 1).float()) # 目标的高
# 类别cls
if featuremap_coordinate.size(0) == 0:
# 代表没有框
cls = torch.tensor([]).view(featuremap_coordinate.size(0), 0).to(device)
return torch.tensor([]).view(-1, 6).to(device)
else:
cls = torch.tensor([]).view(featuremap_coordinate.size(0), -1).to(device)
for i in range(int(channel - 5)):
cl = featuremap[:, :, :, 5 + i][obj_mask].view(-1, 1).float()
cls = torch.cat((cls, cl), 1)
_, cls_id = torch.max(cls, dim=1)
cls_id = cls_id.view(-1, 1).float() # 获取到类别的id
# 转换wh坐标(resize之后)
selected_anchor = torch.tensor(config.ANCHORS_GROUP[stride])[
featuremap_coordinate[:, 2].int().cpu().numpy().tolist()]
after_resize_wh = selected_anchor.to(device).float() * torch.cat((w, h), dim=1) # [-1,2] [w,h]
# 转换坐标(resize之后)
xmin = (featuremap_coordinate[:, 1].view(-1, 1) + offset_x) * stride - (after_resize_wh[:, 0].view(-1, 1) / 2)
ymin = (featuremap_coordinate[:, 0].view(-1, 1) + offset_y) * stride - (after_resize_wh[:, 1].view(-1, 1) / 2)
xmax = xmin + after_resize_wh[:, 0].view(-1, 1)
ymax = ymin + after_resize_wh[:, 1].view(-1, 1)
finall_box = torch.cat((cls_id, confidence, xmin, ymin, xmax, ymax), dim=1)
return finall_box这个函数就是精华中的精华了,这个函数看懂,那么,yolo你估计也就没啥疑问了。
4.2.2 NMS函数
def NMS(self, lists, treshold):
values, index = (-lists[:, 1]).sort(0)
boxes = lists[index].float()
fal_box = torch.tensor([]).view(-1, 6)
while boxes.shape[0] > 1: # 多于一个框
max_score_box = boxes[0].view(-1, 6)
rest_boxes = boxes[1:].view(-1, 6)
fal_box = torch.cat((fal_box, max_score_box), dim=0)
boxes = rest_boxes[self.IOU(max_score_box[:, 2:], rest_boxes[:, 2:]) < treshold] # 小于阈值的保留
if boxes.shape[0] > 0: # 只有一个框的情况
fal_box = torch.cat((fal_box, boxes[0].view(-1, 6)), dim=0)
return fal_box
def IOU(self, max_score_box, rest_boxes):
# max_score_box = [xmin,ymin,xmax,ymax,score]
max_score_area = (max_score_box[:, 2] - max_score_box[:, 0]) * (
max_score_box[:, 3] - max_score_box[:, 1]) # 最大值框的面积
rest_area = (rest_boxes[:, 2] - rest_boxes[:, 0]) * (rest_boxes[:, 3] - rest_boxes[:, 1]) # 剩下的框的面积
x1 = torch.max(max_score_box[:, 0], rest_boxes[:, 0])
y1 = torch.max(max_score_box[:, 1], rest_boxes[:, 1])
x2 = torch.min(max_score_box[:, 2], rest_boxes[:, 2])
y2 = torch.min(max_score_box[:, 3], rest_boxes[:, 3])
w = torch.max(torch.tensor([0.]), x2 - x1)
h = torch.max(torch.tensor([0.]), y2 - y1)
intersection = w * h # 交集
union = rest_area + max_score_area - intersection # 并集
iou = intersection / union
return iouNMS就是为了去掉多余的框,去掉的条件就是,iou大于iou阈值的框,好了,你要问了,啥叫IOU,上图
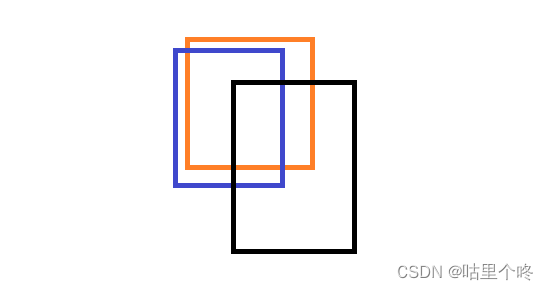
假设红框是置信度最高的框,蓝色和黑色是另外预测出来的两个框,但是置信度没他高,iou就是红框和蓝框交集/红框和蓝框的并集,黑框同理。代码都在上面了,可以理一理。
4.3 画框
def draw_box(img, boxes,img_name):
for i in boxes:
cv2.rectangle(img, (i[1], i[2]), (i[3], i[4]), color=(0, 0, 255),thickness=3)
cv2.imwrite('./result/'+img_name,img)
# cv2.imshow('demo', cv2.resize(img,(640,640)))
# cv2.waitKey()
return img这就是一个可视化的函数了,把框画到图片上。
好了,到这里,整个项目就结束了。各位兄弟,如果可以对YOLO感兴趣的话,可以去试一试了。
5.项目代码
guligedong_yolo.7z-深度学习文档类资源-CSDN文库![]() https://download.csdn.net/download/guligedong/56893586
https://download.csdn.net/download/guligedong/56893586
至此,敬礼,salute!!!!
老规矩,上咩咩
