1. pytorch 预训练模型
卷积神经网络的训练是耗时的,很多场合不可能每次都从随机初始化参数开始训练网络。pytorch中自带几种常用的深度学习网络预训练模型,如VGG、ResNet等。往往为了加快学习的进度,在训练的初期我们直接加载pre-train模型中预先训练好的参数,model的加载如下所示:
import torchvision.models as models
#resnet
model = models.ResNet(pretrained=True)
model = models.resnet18(pretrained=True)
model = models.resnet34(pretrained=True)
model = models.resnet50(pretrained=True)
#vgg
model = models.VGG(pretrained=True)
model = models.vgg11(pretrained=True)
model = models.vgg16(pretrained=True)
model = models.vgg16_bn(pretrained=True)
2. 修改全连接层类别数目
预训练模型以 resnet50 为例。
model = torchvision.models.resnet50(pretrained=True)
#提取fc层中固定的参数
fc_features = model.fc.in_features
#修改类别为10,重定义最后一层
model.fc = nn.Linear(fc_features ,10)
print(model.fc)
或者直接传入类别个数:
self.resnet = torchvision.models.resnet50(pretrained=False,num_classes=10)
3. 修改某一层卷积
预训练模型以 resnet50 为例。
model = torchvision.models.resnet50(pretrained=True)
# 重定义第一层卷积的输入通道数
model.conv1 = nn.Conv2d(4, 64, kernel_size=7, stride=2, padding=3, bias=False)
4. 修改某几层卷积
4.1 去掉后两层(fc层和pooling层)
预训练模型以 resnet50 为例。
nn.module的model它包含一个叫做children()的函数,这个函数可以用来提取出model每一层的网络结构,在此基础上进行修改即可,修改方法如下(去除后两层):
resnet_50_s = torchvision.models.resnet50(pretrained=False)
resnet_layer = nn.Sequential(*list(resnet_50_s.children())[:-2])
self.resnet = resnet_layer
在去掉预训练resnet模型的后两层(fc层和pooling层)后,新添加一个上采样层、池化层和分类层,构建网络代码如下:
class Net_resnet50_upsample(nn.Module):
def __init__(self):
super(Net_resnet50_upsample, self).__init__()
self.conv = nn.Conv2d(1, 3, kernel_size=1)
resnet_50_s = torchvision.models.resnet50(pretrained=False)
resnet_layer = nn.Sequential(*list(resnet_50_s.children())[:-2])
self.resnet = resnet_layer
# print(self.resnet)
self.up7to14=nn.UpsamplingNearest2d(scale_factor=2)
self.avgpool=nn.AvgPool2d(7,stride=2)
self.fc = nn.Sequential(
nn.Linear(2048 * 4 * 4, 1024),
nn.ReLU(inplace=True),
nn.Linear(1024, 128),
nn.ReLU(inplace=True),
nn.Linear(128, 10))
def forward(self, x):
x = self.conv(x)
x = self.resnet(x)
x=self.up7to14(x)
x=self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
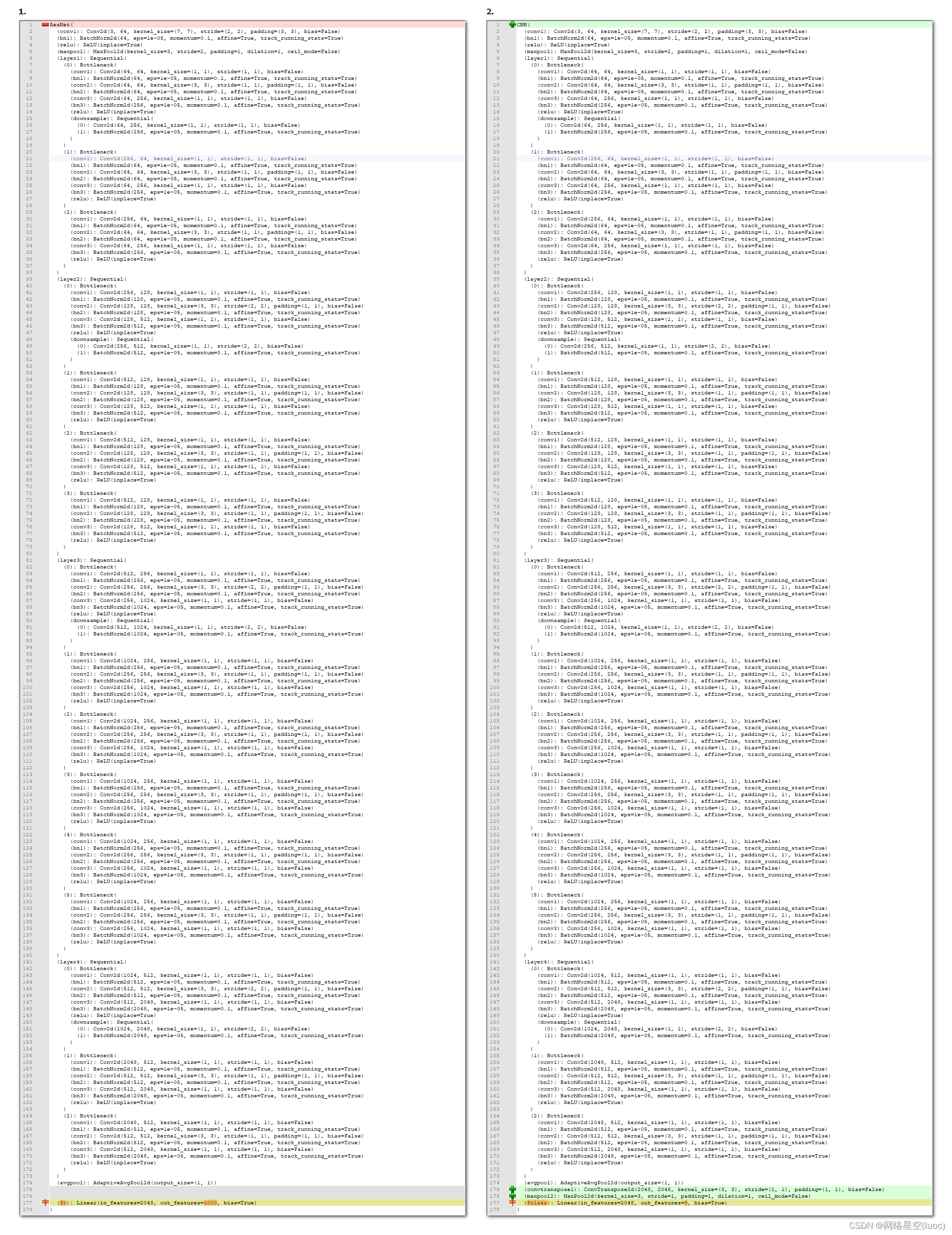
4.2 增减多个卷积层
有的时候要修改网络中的层次结构,这时只能用参数覆盖的方法,即自己先定义一个类似的网络,再将预训练中的参数提取到自己的网络中来。这里以resnet预训练模型举例。
# coding=UTF-8
import torchvision.models as models
import torch
import torch.nn as nn
import math
import torch.utils.model_zoo as model_zoo
#Bottleneck是一个class 里面定义了使用1*1的卷积核进行降维跟升维的一个残差块,可以在github resnet pytorch上查看
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
#不做修改的层不能乱取名字,否则预训练的权重参数无法传入
class CNN(nn.Module):
def __init__(self, block, layers, num_classes=9):
self.inplanes = 64
super(CNN, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AdaptiveAvgPool2d(output_size=(1,1))
# 新增一个反卷积层
self.convtranspose1 = nn.ConvTranspose2d(2048, 2048, kernel_size=3, stride=1, padding=1, output_padding=0,
groups=1, bias=False, dilation=1)
# 新增一个最大池化层
self.maxpool2 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
# 去掉原来的fc层,新增一个fclass层
self.fclass = nn.Linear(2048, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
# 新加层的forward
x = x.view(x.size(0), -1)
x = self.convtranspose1(x)
x = self.maxpool2(x)
x = x.view(x.size(0), -1)
x = self.fclass(x)
return x
# 加载model
resnet50 = models.resnet50(pretrained=False)
print(resnet50)
cnn = CNN(Bottleneck, [3, 4, 6, 3]) #3 4 6 3 分别表示layer1 2 3 4 中Bottleneck模块的数量。res101则为3 4 23 3
# 读取参数
pretrained_dict = resnet50.state_dict()
model_dict = cnn.state_dict()
# 将pretrained_dict里不属于model_dict的键剔除掉
pretrained_dict = {
k: v for k, v in pretrained_dict.items() if k in model_dict}
# 更新现有的model_dict
model_dict.update(pretrained_dict)
# 加载我们真正需要的state_dict
cnn.load_state_dict(model_dict)
# print(resnet50)
print(cnn)
结果对比:
文章知识点与官方知识档案匹配,可进一步学习相关知识