代码
#include <iostream>
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/videoio.hpp>
#include <opencv2/video.hpp>
using namespace cv;
using namespace std;
//原图, 原图的灰度图, 目标图
Mat g_srcImage, g_srcGrayImage, g_dstImage;
//Canny 边缘检测相关变量
Mat g_cannyDetectedEdges;
int g_cannyLowThreshold = 1; // TrackBar 位置参数
//Sobel边缘检测相关变量
Mat g_sobelGradient_X, g_sobelGradient_Y;
Mat g_gobelAbsGradient_X, g_gobelAbsGradient_Y;
int g_sobelKernelSize = 1; // TrackBar 位置参数
//Scharr滤波器相关变量
Mat g_scharrGradient_X, g_scharrGradient_Y;
Mat g_scharrAbsGradient_X, g_scharrAbsGradient_Y;
//全局函数
static void on_Canny(int, void*); //Canny边缘检测窗口滚动条的回调函数
static void on_Sobel(int, void*); //Sobel边缘检测窗口滚动条的回调函数
void Scharr(); //封装了Scharr边缘检测相关代码的函数
int main(int argc, char** argv)
{
//载入原图
g_srcImage = imread("700levi.jpg");
if (!g_srcImage.data) {
cout << "读取错误" << endl;
return -1;
}
namedWindow("原始图");
imshow("原始图", g_srcImage);
//创建与src同类型和大小的矩阵
g_dstImage.create(g_srcImage.size(), g_srcImage.type());
//原图转换为灰度图像
cvtColor(g_srcImage, g_srcGrayImage, COLOR_BGR2GRAY);
//创建和显示窗口
namedWindow("效果图Canny边缘检测");
namedWindow("效果图Sobel边缘检测");
//创建trackbar
createTrackbar("参数值", "效果图Canny边缘检测", &g_cannyLowThreshold, 120, on_Canny);
createTrackbar("参数值", "效果图Sobel边缘检测", &g_sobelKernelSize, 3, on_Sobel);
//调用回调函数
on_Canny(0, 0);
on_Sobel(0, 0);
//调用封装了Scharr边缘检测代码的函数
Scharr();
//按下q 程序退出
while (char(waitKey(1)) != 'q') {};
return 0;
}
//Canny边缘检测窗口滚动条的回调函数
void on_Canny(int, void*) {
//先使用 3*3 内核来降噪
blur(g_srcGrayImage, g_cannyDetectedEdges, Size(3, 3));
//运行Canny算子
Canny(g_cannyDetectedEdges, g_cannyDetectedEdges, g_cannyLowThreshold, g_cannyLowThreshold * 3, 3);
//先将g_dstImage内所有的元素设置为0
g_dstImage = Scalar::all(0);
//使用Canny算子输出的边缘图作为掩码,将原图g_srcImage拷贝到图g_dstImage中
g_srcImage.copyTo(g_dstImage, g_cannyDetectedEdges);
//显示效果图
imshow("效果图Canny边缘检测", g_dstImage);
}
//Sobel边缘检测窗口滚动条的回调函数
void on_Sobel(int, void*) {
//求X方向梯度
Sobel(g_srcImage, g_sobelGradient_X, CV_16S, 1, 0, (2* g_sobelKernelSize+1), 1, 1, BORDER_DEFAULT);
convertScaleAbs(g_sobelGradient_X, g_gobelAbsGradient_X);//计算绝对值, 并将结果转换成8位
//求Y方向梯度
Sobel(g_srcImage, g_sobelGradient_Y, CV_16S, 0, 1, (2 * g_sobelKernelSize + 1), 1, 1, BORDER_DEFAULT);
convertScaleAbs(g_sobelGradient_Y, g_gobelAbsGradient_Y);//计算绝对值, 并将结果转换成8位
//合并梯度
addWeighted(g_gobelAbsGradient_X, 0.5, g_gobelAbsGradient_Y, 0.5, 0, g_dstImage);
//显示效果图
imshow("效果图Sobel边缘检测", g_dstImage);
}
//Scharr边缘检测
void Scharr() {
//求X方向梯度
Scharr(g_srcImage, g_scharrGradient_X, CV_16S, 1, 0, 1, 0, BORDER_DEFAULT);
//计算绝对值,并将结果转换成8位
convertScaleAbs(g_scharrGradient_X, g_scharrAbsGradient_X);
//求Y方向梯度
Scharr(g_srcImage, g_scharrGradient_Y, CV_16S, 0, 1, 1, 0, BORDER_DEFAULT);
//计算绝对值,并将结果转换成8位
convertScaleAbs(g_scharrGradient_Y, g_scharrAbsGradient_Y);
//合并梯度
addWeighted(g_scharrAbsGradient_X, 0.5, g_scharrAbsGradient_Y, 0.5, 0, g_dstImage);
//显示效果图
imshow("效果图Scharr边缘检测", g_dstImage);
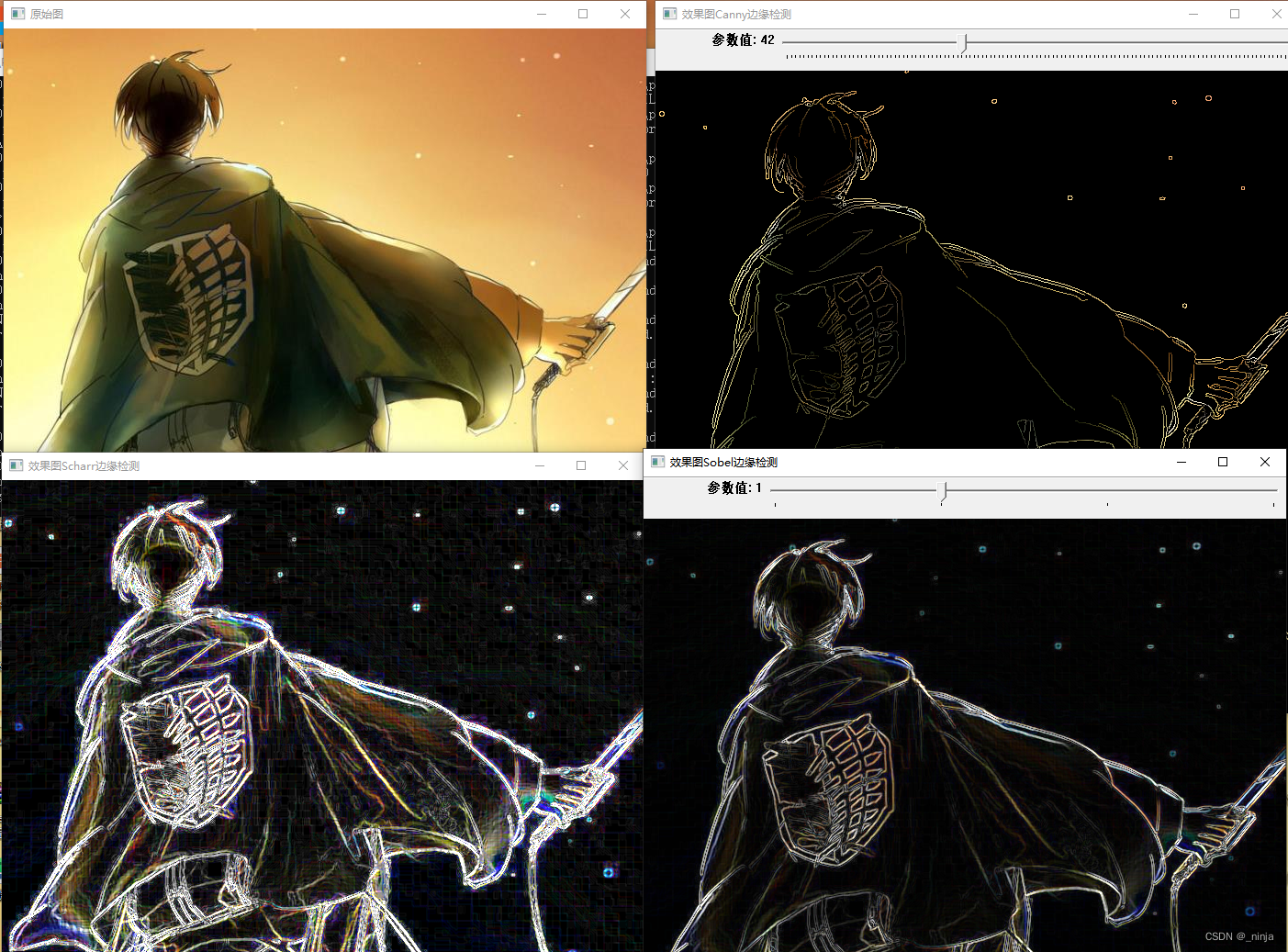
}效果