原文: https://www.cnblogs.com/skyfsm/p/6879265.html
边缘检测的一般步骤:
- 滤波——消除噪声
- 增强——使边界轮廓更加明显
- 检测——选出边缘点
Canny算法
Canny边缘检测算法被很多人推崇为当今最优秀的边缘检测算法,所以我们第一个就介绍他。
opencv中提供了Canny函数。
#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
//边缘检测
int main()
{
Mat img = imread("lol3.jpg");
imshow("原始图", img);
Mat DstPic, edge, grayImage;
//创建与src同类型和同大小的矩阵
DstPic.create(img.size(), img.type());
//将原始图转化为灰度图
cvtColor(img, grayImage, COLOR_BGR2GRAY);
//先使用3*3内核来降噪
blur(grayImage, edge, Size(3, 3));
//运行canny算子
Canny(edge, edge, 3, 9, 3);
imshow("边缘提取效果", edge);
waitKey(0);
}看了canny算法提取的轮廓图,感觉真是厉害,居然把那么细致的额轮廓都提取出来了!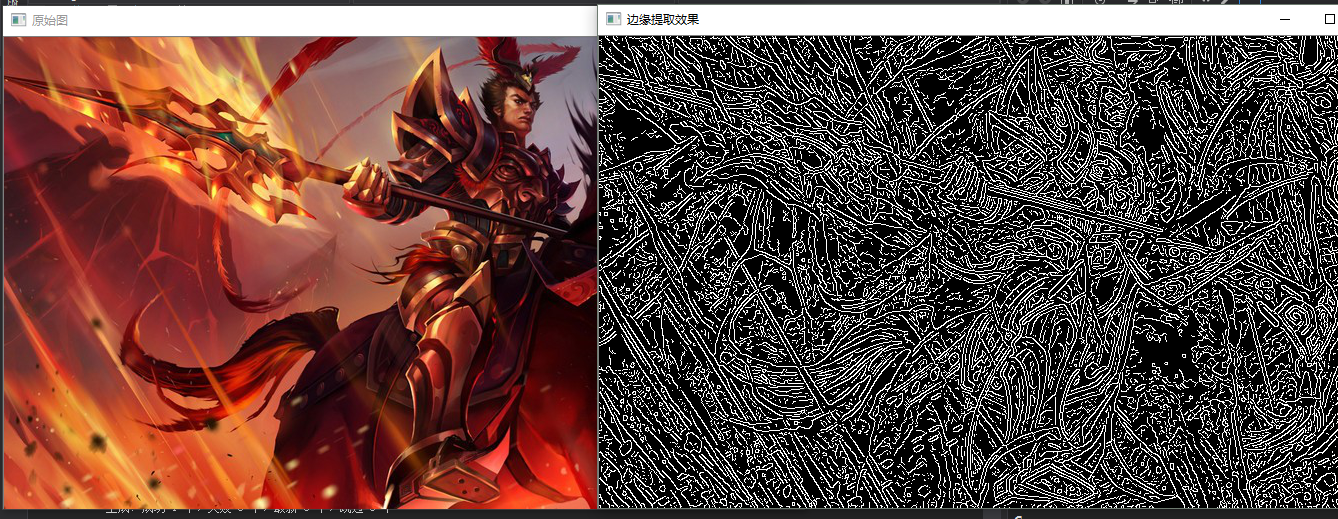
Sobel算法
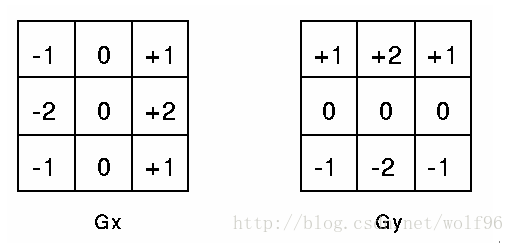
核心公式
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像,其公式如下:

图像的每一个像素的横向及纵向梯度近似值可用以下的公式结合,来计算梯度的大小。

可用以下公式计算梯度方向。

在以上例子中,如果以上的角度Θ等于零,即代表图像该处拥有纵向边缘,左方较右方暗。
GX为水平过滤器,GY为垂直过滤器,垂直过滤器就是水平过滤器旋转90度。
过滤器为3x3的矩阵,将与图像作平面卷积。
如果不存在边则两个点颜色很接近,过滤器返回一个较小的值,否则就可判断出边缘的存在。
当前点为中间点
具体计算如下:
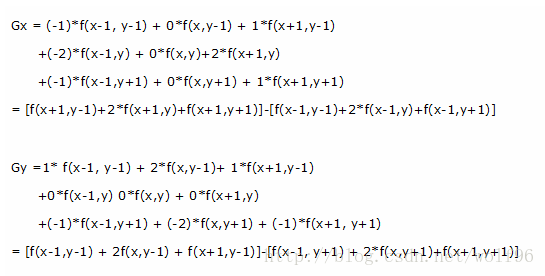
求出图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小

#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
//边缘检测
int main()
{
Mat img = imread("lol3.jpg");
imshow("原始图", img);
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y, dst;
//求x方向梯度
Sobel(img, grad_x, CV_16S, 1, 0, 3, 1, 1,BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
imshow("x方向soble", abs_grad_x);
//求y方向梯度
Sobel(img, grad_y,CV_16S,0, 1,3, 1, 1, BORDER_DEFAULT);
convertScaleAbs(grad_y,abs_grad_y);
imshow("y向soble", abs_grad_y);
//合并梯度
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, dst);
imshow("整体方向soble", dst);
waitKey(0);
}通过下图可以看出,sobel的轮廓提取明显有没cnany的那么细致,只是把一些明显轮廓的边缘提取出来了,看起来会更舒服一点。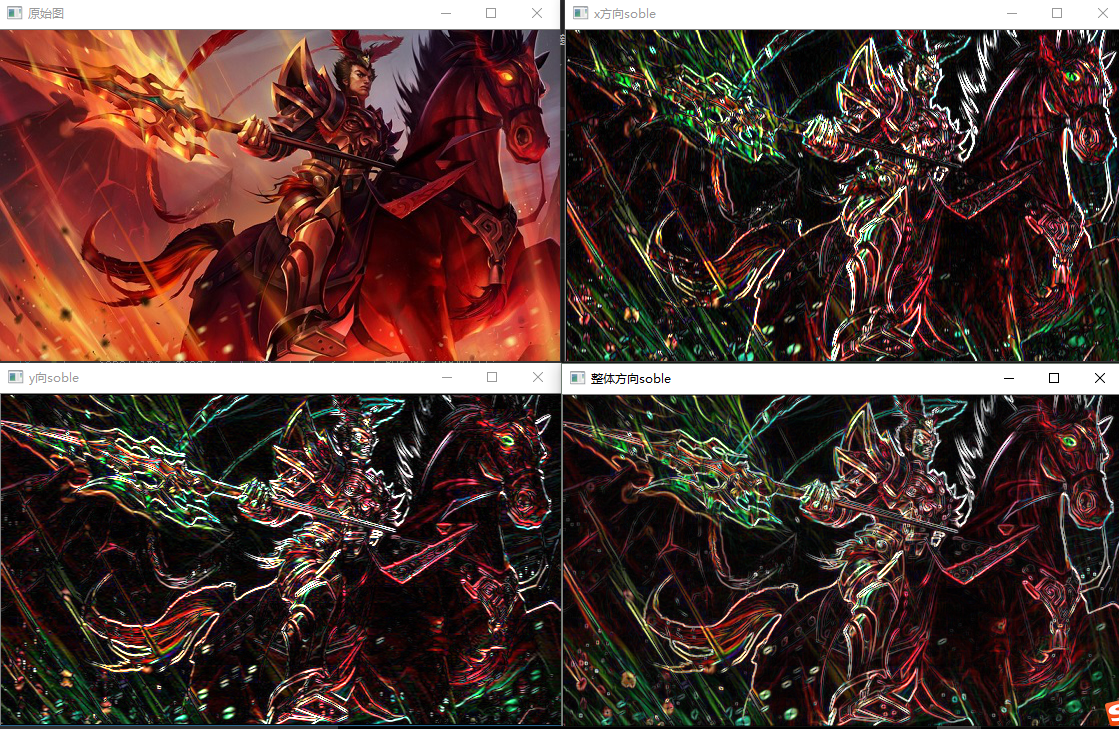
灰度图的效果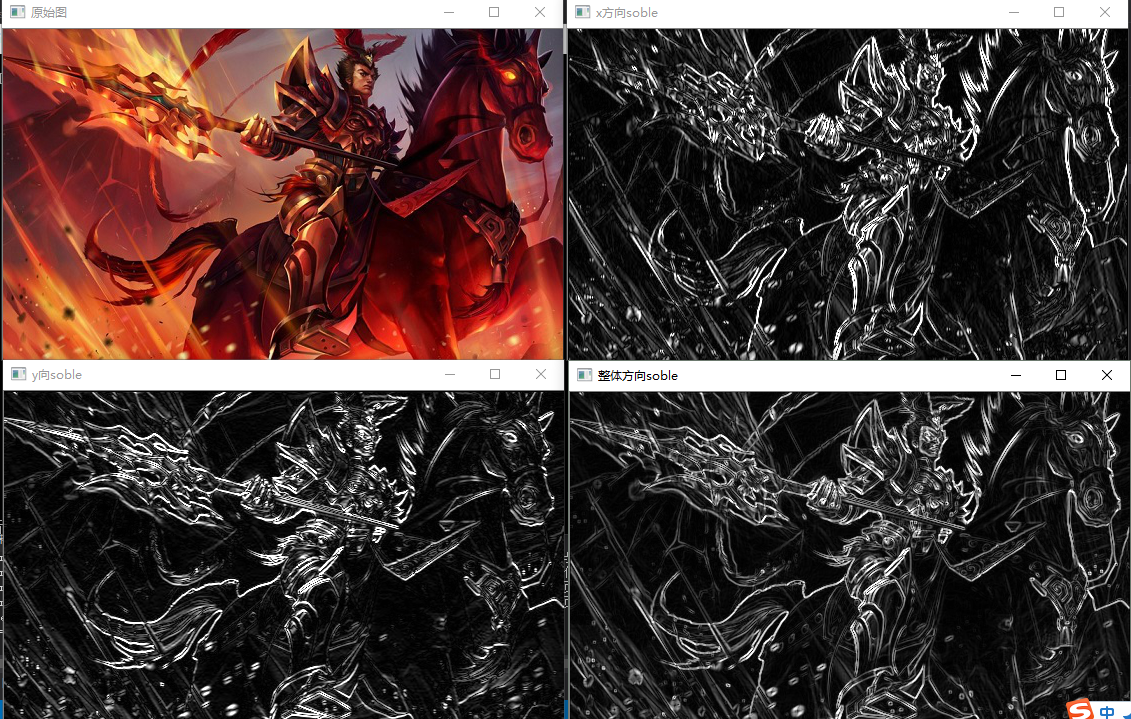
Laplacian算法
#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
//边缘检测
int main()
{
Mat img = imread("lol3.jpg");
imshow("原始图", img);
Mat gray, dst,abs_dst;
//高斯滤波消除噪声
GaussianBlur(img, img, Size(3, 3), 0, 0, BORDER_DEFAULT);
//转换为灰度图
cvtColor(img, gray, COLOR_RGB2GRAY);
//使用Laplace函数
//第三个参数:目标图像深度;第四个参数:滤波器孔径尺寸;第五个参数:比例因子;第六个参数:表示结果存入目标图
Laplacian(gray, dst, CV_16S, 3, 1, 0, BORDER_DEFAULT);
//计算绝对值,并将结果转为8位
convertScaleAbs(dst, abs_dst);
imshow("laplace效果图", abs_dst);
waitKey(0);
}但是感觉效果一般,图像变得模糊了。