pcl点云可视化
可视化(Visualization)是利用计算机图形学和图像处理技术,将数据转换成图形或图像在屏幕显示出来,并且进行交互处理的理论、方法和技术。
PCL中pcl_visualization库中提供了可视化相关的数据结构和组件,其主要是为了可视化其他模块算法处理后的结果,可直观的反馈给用户。其依赖于pcl_common、pcl_range_image、pcl_kdtree、pcl_IO模块以及VTK外部开源可视化库。下面给出2个常用的可视化类。
类一:pcl::visualization::PCLVisualizer
PCLVisualizer是PCL可视化3D点云的主要类。其内部实现了添加各种3D对象以及交互的实现等,比其他类实现的功能更齐全。
基础显示功能:显示点云、网格、设置颜色、连线
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>
// 包含相关头文件
#include <pcl/visualization/pcl_visualizer.h>
typedef pcl::PointXYZ PointT;
int main()
{
// 读取点云
pcl::PointCloud<PointT>::Ptr cloud1(new pcl::PointCloud<PointT>);
pcl::io::loadPCDFile("0010.pcd", *cloud1);
pcl::PointCloud<PointT>::Ptr cloud2(new pcl::PointCloud<PointT>);
pcl::io::loadPCDFile("0020.pcd", *cloud2);
// 定义对象
pcl::visualization::PCLVisualizer viewer;
//设置背景颜色,默认黑色
//viewer.setBackgroundColor(100, 100, 100); // rgb
// --- 显示点云数据 ----
// "cloud1" 为显示id,默认cloud,显示多个点云时用默认会报警告。
pcl::visualization::PointCloudColorHandlerCustom<PointT> green(cloud2, 0, 255, 0); // rgb
viewer.addPointCloud(cloud1, green, "cloud1");
pcl::visualization::PointCloudColorHandlerCustom<PointT> red(cloud2, 255, 0, 0); // rgb
// 将点云设置颜色,默认白色
viewer.addPointCloud(cloud2, red, "cloud2");
// 将两个点连线
PointT temp1 = cloud1->points[0];
PointT temp2 = cloud1->points[1000];
//viewer.addLine(temp1, temp2, "line0");
// 同样可以设置线的颜色,蓝色
viewer.addLine(temp1, temp2, 0, 0, 255, "line0");
// --- 显示网格数据 ---
pcl::PolygonMesh mesh;
pcl::io::loadPLYFile("read.ply", mesh);
viewer.addPolygonMesh(mesh);
// 开始显示2种方法,任选其一
// 1. 阻塞式
viewer.spin();
// 2. 非阻塞式
while (!viewer.wasStopped())
{
viewer.spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
// 可添加其他操作
}
system("pause");
return 0;
}
效果图
高级功能:设置回掉函数进行交互、显示区域分割
按键事件
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
// 回掉函数所用数据结构
struct callback_args {
bool *isShow;
pcl::PointCloud<pcl::PointXYZ>::Ptr orgin_points;
pcl::visualization::PCLVisualizer::Ptr viewerPtr;
};
// 按键事件回掉函数
void kb_callback(const pcl::visualization::KeyboardEvent& event, void* args)
{
if (event.keyDown() && event.getKeyCode() == 'a')
{
std::cout << "a has pressed" << std::endl;
struct callback_args* data = (struct callback_args *)args;
if (*(data->isShow))
{
data->viewerPtr->removePointCloud("cloud");
*(data->isShow) = false;
std::cout << "remove" << std::endl;
}
else {
data->viewerPtr->addPointCloud(data->orgin_points, "cloud");
*(data->isShow) = true;
std::cout << "add" << std::endl;
}
}
}
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("bunny.pcd", *cloud);
pcl::console::print_highlight("load cloud !\n");
// 定义对象
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer);
viewer->addPointCloud(cloud, "cloud");
// 初始化参数
bool isShow = true;
struct callback_args kb_args;
kb_args.isShow = &isShow;
kb_args.orgin_points = cloud;
kb_args.viewerPtr = viewer;
// 设置回掉函数
viewer->registerKeyboardCallback(kb_callback, (void*)&kb_args);
viewer->spin();
return 0;
}
这段代码实现了按下a清空显示,再按下重新显示。
主要设置回掉函数实现
viewer->registerKeyboardCallback(kb_callback, (void*)&kb_args);
kb_callback实现具体功能。
点选取事件
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
struct callback_args {
// structure used to pass arguments to the callback function
pcl::PointCloud<pcl::PointXYZ>::Ptr clicked_points_3d;
pcl::visualization::PCLVisualizer::Ptr viewerPtr;
};
void pp_callback(const pcl::visualization::PointPickingEvent& event, void* args)
{
struct callback_args* data = (struct callback_args *)args;
if (event.getPointIndex() == -1)
return;
int index = event.getPointIndex();
std::cout << "index: " << index << std::endl;
pcl::PointXYZ current_point;
event.getPoint(current_point.x, current_point.y, current_point.z);
data->clicked_points_3d->points.push_back(current_point);
// Draw clicked points in red:
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> red(data->clicked_points_3d, 255, 0, 0);
data->viewerPtr->removePointCloud("clicked_points");
data->viewerPtr->addPointCloud(data->clicked_points_3d, red, "clicked_points");
data->viewerPtr->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 10, "clicked_points");
std::cout << current_point.x << " " << current_point.y << " " << current_point.z << std::endl;
}
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("bunny.pcd", *cloud);
pcl::console::print_highlight("load cloud !\n");
pcl::visualization::PCLVisualizer viewer;
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> green(cloud, 0, 255, 0);
viewer.addPointCloud(cloud, green, "cloud");
// Add point picking callback to viewer:
struct callback_args cb_args;
pcl::PointCloud<pcl::PointXYZ>::Ptr clicked_points_3d(new pcl::PointCloud<pcl::PointXYZ>);
cb_args.clicked_points_3d = clicked_points_3d;
cb_args.viewerPtr = pcl::visualization::PCLVisualizer::Ptr(&viewer);
viewer.registerPointPickingCallback(pp_callback, (void*)&cb_args);
pcl::console::print_highlight("Shift+click on three floor points, then press 'Q'...\n");
// Spin until 'Q' is pressed:
viewer.spin();
system("pause");
return 0;
}
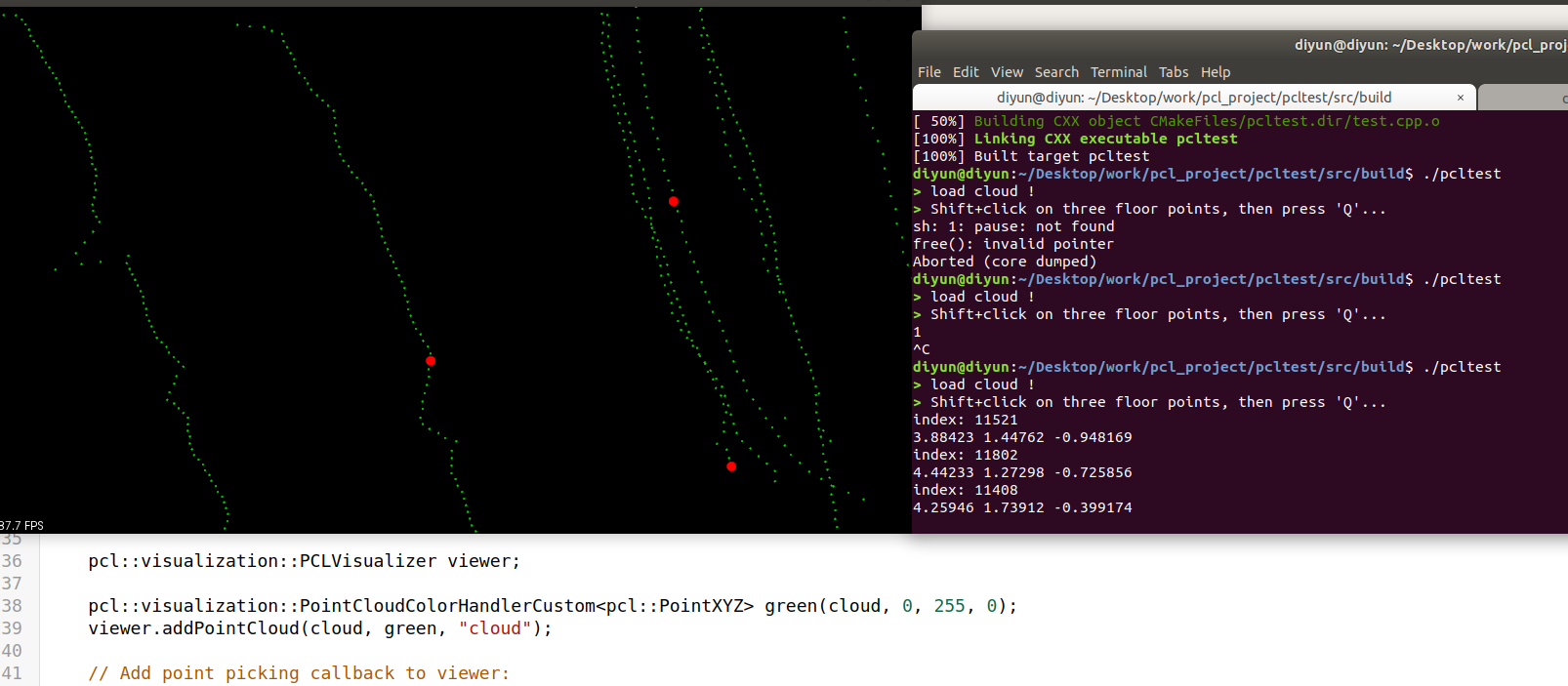
效果图
按下shfit并点击某个点会将坐标打印出来。
区域选取事件
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
struct callback_args{
// structure used to pass arguments to the callback function
pcl::PointCloud<pcl::PointXYZ>::Ptr orgin_points;
pcl::PointCloud<pcl::PointXYZ>::Ptr chosed_points_3d;
pcl::visualization::PCLVisualizer::Ptr viewerPtr;
};
void ap_callback(const pcl::visualization::AreaPickingEvent& event, void* args)
{
struct callback_args* data = (struct callback_args *)args;
std::vector<int> indiecs;
if (!event.getPointsIndices(indiecs))
return;
for (int i = 0; i < indiecs.size(); ++i)
{
data->chosed_points_3d->push_back(data->orgin_points->points[indiecs[i]]);
}
// Draw clicked points in red:
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> red(data->chosed_points_3d, 255, 0, 0);
data->viewerPtr->removePointCloud("chosed_points");
data->viewerPtr->addPointCloud(data->chosed_points_3d, red, "chosed_points");
data->viewerPtr->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "chosed_points");
std::cout << "selected " << indiecs.size() << " points , now sum is " << data->chosed_points_3d->size() << std::endl;
}
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("rabbit.pcd", *cloud);
pcl::console::print_highlight("load cloud !\n");
pcl::visualization::PCLVisualizer viewer;
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> green(cloud, 0, 255, 0);
viewer.addPointCloud(cloud, green, "cloud");
// Add point picking callback to viewer:
struct callback_args cb_args;
cb_args.orgin_points = cloud;
pcl::PointCloud<pcl::PointXYZ>::Ptr chosed_points_3d(new pcl::PointCloud<pcl::PointXYZ>);
cb_args.chosed_points_3d = chosed_points_3d;
cb_args.viewerPtr = pcl::visualization::PCLVisualizer::Ptr(&viewer);
viewer.registerAreaPickingCallback(ap_callback, (void*)&cb_args);
pcl::console::print_highlight("press x enter slected model, then press 'qQ'...\n");
// Spin until 'Q' is pressed:
viewer.spin();
system("pause");
return 0;
}
显示区域分割
pcl可以将显示区域分割,从(xmin,ymin)到(xmax,ymax)一个矩形区域,范围是(0,1)。左下角(0,0),右上角(1,1)。之前所有的函数都支持区域显示。
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
// 包含相关头文件
#include <pcl/visualization/pcl_visualizer.h>
typedef pcl::PointXYZ PointT;
int main()
{
// 读取点云
pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>);
pcl::io::loadPCDFile("read.pcd", *cloud);
// 定义对象
pcl::visualization::PCLVisualizer viewer;
int v1(1); // viewport
viewer.createViewPort(0.0, 0.0, 0.5, 1.0, v1);
viewer.setBackgroundColor(255, 0, 0, v1);
viewer.addPointCloud(cloud, "cloud1", v1);;
int v2(2);// viewport
viewer.createViewPort(0.5, 0.0, 1.0, 1.0, v1);
viewer.setBackgroundColor(0, 255, 0, v2);
viewer.addPointCloud(cloud, "cloud2", v2);;
viewer.spin();
system("pause");
return 0;
}

类二:pcl::visualization::CloudViewer
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
// 包含相关头文件
#include <pcl/visualization/cloud_viewer.h>
typedef pcl::PointXYZ PointT;
int main()
{
// 读取点云
pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>);
pcl::io::loadPCDFile("read.pcd", *cloud);
pcl::visualization::CloudViewer viewer("simple cloud viewer");
viewer.showCloud(cloud);
while (!viewer.wasStopped())
{
// todo::
}
system("pause");
return 0;
}