Content-Aware Unsupervised Deep Homography Estimation
内容感知的非监督深度单应矩阵估计
code
Abstract
RANSAC → learn an outlier mask (Only select reliable regions for homography estimation )
learned deep features → calculate loss
formulate a novel triplet loss → achieve the unsupervised training
supervised solution
Something about dataset generation
Require Ground Truth Homography → produce image pairs(input image → GT homography → generate output image)
Weakness: far from real cases (real depth disparities 实际深度差异) 对真实图像的泛化能力较差 depth variations of parallax
To solve this problem: unsupervised solution is promoted.
unsupervised solution
Nguyen et al. : Unsupervised deep homography: A fast and robust homography estimation model.
minimizes the photometric loss on real image pairs
Two main problems:
- the loss calculated with respect to image intensity is less effective than that in the feature space
- the loss is calculated uniformly in
the entire image ignoring the RANSAC-like process
Result: cannot exclude the moving or non-planar objects to contribute the final loss
Limit: work on aerial images that are far away from the camera to minimize the influence of depth variations of parallax
Contributions
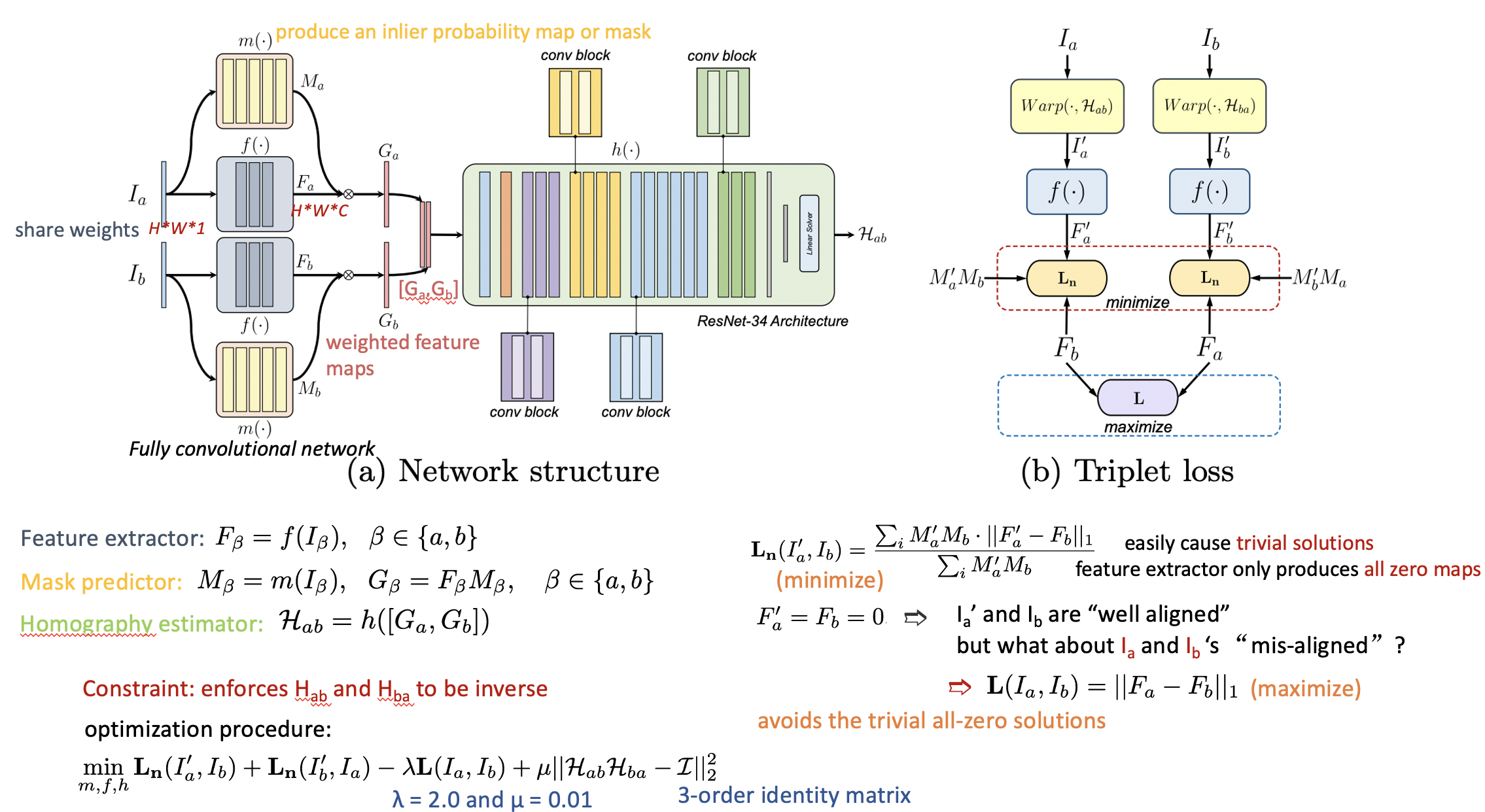
A new architecture with content-awareness learning 内容感知
Object: image pairs with a small baseline
Optimize a homography: specially learns
( intermediate results)
1. a deep feature for alignment → loss calculation
2. a content-aware mask → reject outlier regions & loss calculation
DeTone et al.: Deep Image Homography Estimation using photometric loss to caculate loss.
Formulate a novel triplet loss
An image pair dataset: contains 5 categories of scenes and human-labeled GT point correspondences
Algorithm
STN is used to achieve the warping operation.
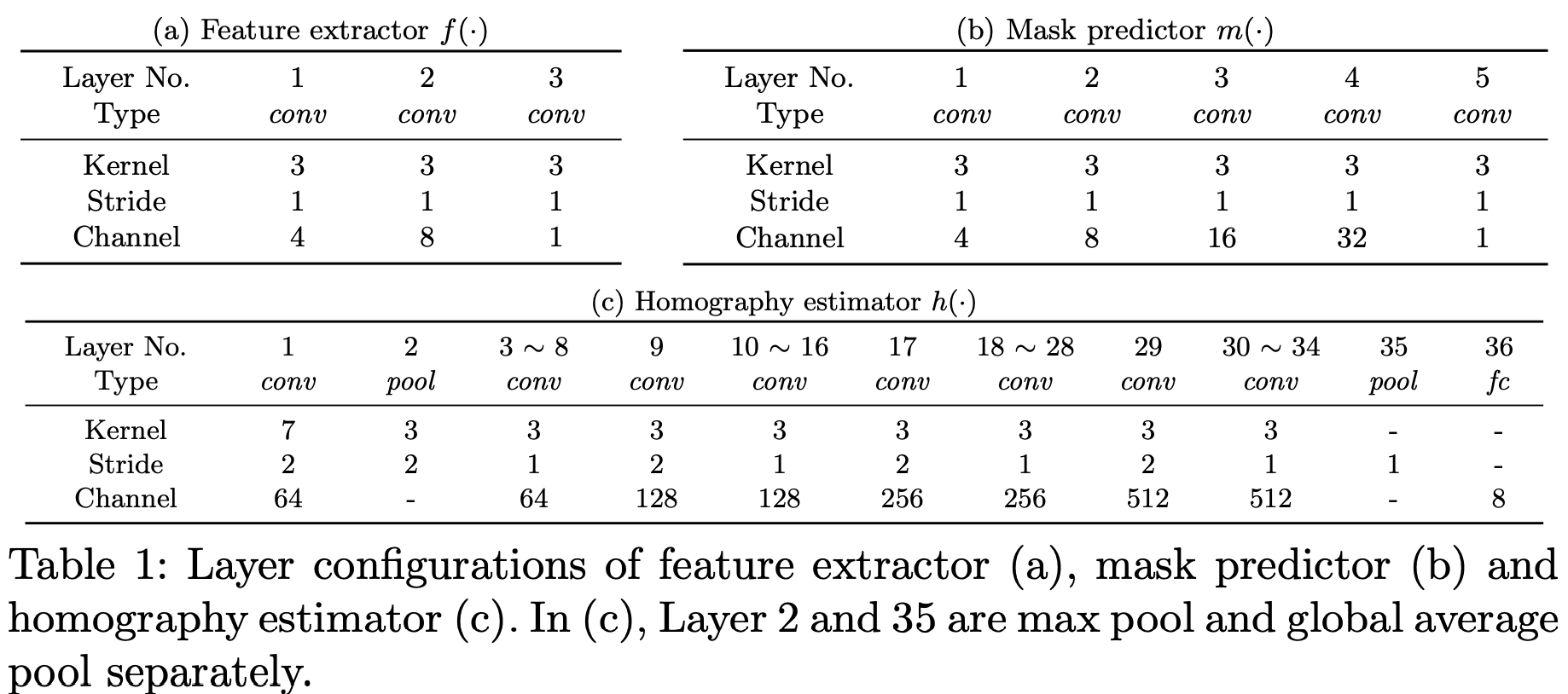
Network Structure & Triplet Loss
Training
Two-stage strategy:
- disabling the attention map role of the mask G β = F β , β ∈ a , b G_β=F_β, β∈a, b Gβ=Fβ,β∈a,b
- 60k iterations later, finetune the network by involving
the attention map role of the mask as M β = m ( I β ) , G β = F β M β , β ∈ a , b M_β=m(I_β), G_β=F_βM_β, β∈a, b Mβ=m(Iβ),Gβ=FβMβ,β∈a,b
Advantages: Reduces the error by 4.40% in average comparing with train totally from scratch.
Dataset
80k image pairs including regular (RE), low-texture (LT), low-light(LL), small-foregrounds (SF), and large-foregrounds (LF) scenes.
Test data: 4.2k image pairs are randomly chosen from all categories
Implementation Details
trained with 120k iterations by an Adam optimizer( l r = 1.0 × 1 0 − 4 , β 1 = 0.9 , β 2 = 0.999 , ε = 1.0 × 1 0 − 8 l_r=1.0×10^{−4}, β_1=0.9, β_2=0.999, ε=1.0×10^{−8} lr=1.0×10−4,β1=0.9,β2=0.999,ε=1.0×10−8 )
Batch size: 64
For every 12k iterations, the learning rate l r l_r lr is reduced
by 20%
To augment the training data and avoid black boundaries appearing in the warped image, we randomly crop patches of size 315 × 560 from the original image to form I a I_a Ia and I b I_b Ib.