一、简介
本文描述了CAN收发器驱动程序模块的功能,API和配置。CAN收发器驱动程序模块负责处理ECU上的CAN收发器硬件芯片。
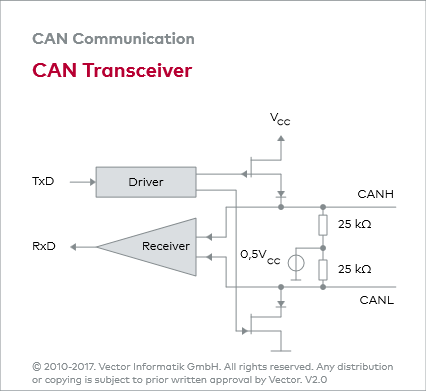
CAN收发器是一种硬件设备,可将CAN总线上使用的信号电平调整为微控制器识别的逻辑(数字)信号电平。此外,收发器还能够检测电气故障,例如布线问题,接地偏移或长主导信号的传输。根据与微控制器的接口,它们会标记检测到的错误,该错误由单个端口引脚或者由SPI传输。
一些收发器支持电源控制并通过CAN总线唤醒。不同的唤醒/睡眠和电源概念在市场上很普遍。
在汽车环境中,主要使用三种不同的CAN总线物理方法。它们是用于高速CAN(最高1Mbits / s)的ISO11898,用于低速CAN(最高125Kbits / s)的ISO11519和用于单线CAN的SAE J2411。
最新发展包括系统基础芯片(SBC),其中除了CAN之外还实现了电源控制和高级看门狗。它们被封闭在一个壳体中并且通过单个接口(例如,通过SPI)进行控制。
介绍操作模式跳转状态图,几种模式POWER_ON, NOT_ACTIVE, ACTIVE, SLEEP,NORMAL, STANBY mode ,根据收发器的不同可以多几个模式状态。
通过CanTrcv_SetOpMode(CANTRCV_TRCVMODE_NORMAL) 调用切换模式。