文章目录
前言
最近学习了ISP自动白平衡-动态阈值算法,这里分享给大家。
1. 动态阈值算法步骤
动态阈值算法主要分为两步:白点检测与白点调整。
白点检测:
- 将图像转换到YCrCb颜色空间,然后对图像进行分块, 3 × 4 3\times 4 3×4共12块;
- 对每块统计Cr, Cb均值 M c r , M c b M_{cr}, M_{cb} Mcr,Mcb;
- 根据步骤2计算的均值统计每块Cr, Cb的方差 D c r , D c b D_{cr}, D_{cb} Dcr,Dcb,计算公式:
D c r = 1 N ∑ ( C r ( i , j ) − M c r ) 2 D_{cr} = \frac{1}{N}\sum(Cr(i,j) - M_{cr})^{2} Dcr=N1∑(Cr(i,j)−Mcr)2
D c b = 1 N ∑ ( C b ( i , j ) − M c b ) 2 D_{cb} = \frac{1}{N}\sum(Cb(i,j) - M_{cb})^{2} Dcb=N1∑(Cb(i,j)−Mcb)2
上式 N N N表示当前分块的像素数量, C r ( i , j ) Cr(i,j) Cr(i,j)表示Cr通道像素位置 ( i , j ) (i,j) (i,j)的像素值 - 过滤掉 D c r , D c b D_{cr}, D_{cb} Dcr,Dcb数值较小的分块(这里数值为 0.01 0.01 0.01);
- 统计所有分块的 M c r , M c b , D c r , D c b M_{cr}, M_{cb}, D_{cr}, D_{cb} Mcr,Mcb,Dcr,Dcb的均值作为图像的均值和方差;
- 根据如下条件筛选候选白点并记录该白点的在图像上的索引:
∣ C r ( i , j ) − ( 1.5 ∗ M c r + D c r ) ∣ ≤ 1.5 ∗ D c r \lvert Cr(i,j) - (1.5*M_{cr} + D_{cr}) \rvert \leq 1.5*D_{cr} ∣Cr(i,j)−(1.5∗Mcr+Dcr)∣≤1.5∗Dcr
∣ C b ( i , j ) − ( M c b + D c b ) ∣ ≤ 1.5 ∗ D c b \lvert Cb(i,j) - (M_{cb} + D_{cb}) \rvert \leq 1.5*D_{cb} ∣Cb(i,j)−(Mcb+Dcb)∣≤1.5∗Dcb
白点调整
- 根据候选白点亮度值从大到小的顺序选择前10%白点作为参考白点;
图像矫正:
- 分别对参考白点计算R,G,B三通道对应像素点的均值 R a v g w , G a v g w , B a v g w R_{avgw}, G_{avgw}, B_{avgw} Ravgw,Gavgw,Bavgw;
- 统计YCrCb图像中Y通道最大值 Y M a x YMax YMax,然后与步骤8计算的均值计算R,G,B三通道的增益系数,
R g a i n = Y M a x R a v g w R_{gain}=\frac{YMax}{R_{avgw}} Rgain=RavgwYMax , G g a i n = Y M a x G a v g w G_{gain}=\frac{YMax}{G_{avgw}} Ggain=GavgwYMax , B g a i n = Y M a x B a v g w B_{gain}=\frac{YMax}{B_{avgw}} Bgain=BavgwYMax - 根据增益对图像进行白平衡矫正
R ( i , j ) = R ( i , j ) ∗ R g a i n R(i,j) = R(i,j)*R_{gain} R(i,j)=R(i,j)∗Rgain , G ( i , j ) = G ( i , j ) ∗ G g a i n G(i,j) = G(i,j)*G_{gain} G(i,j)=G(i,j)∗Ggain , B ( i , j ) = B ( i , j ) ∗ B g a i n B(i,j) = B(i,j)*B_{gain} B(i,j)=B(i,j)∗Bgain
2. C++ Opencv实现
#include <iostream>
#include <opencv2\imgcodecs.hpp>
#include <opencv2\imgproc.hpp>
#include <opencv2\core.hpp>
#include <opencv2\highgui.hpp>
#include <vector>
using namespace cv;
// Auto White Balance - Gray World Algorithm
int AWB_GrayWorld(InputArray src, OutputArray dst)
{
CV_Assert(src.channels() == 3, "AWB_GrayWorld() input image must be 3 channels!");
Mat mSrc = src.getMat();
if (mSrc.empty())
{
std::cout << "AWB_GrayWorld() input image is empty!" << std::endl;
return -1;
}
dst.create(mSrc.size(), mSrc.type());
Mat mDst = dst.getMat();
if (mDst.empty())
{
std::cout << "AWB_GrayWorld() create dst image failed!" << std::endl;
return -1;
}
//对输入src图像进行RGB分离
std::vector<Mat> splitedBGR;
splitedBGR.reserve(3);
split(mSrc, splitedBGR);
//分别计算R/G/B图像像素值均值
double meanR = 0, meanG = 0, meanB = 0;
meanB = mean(splitedBGR[0])[0];
meanG = mean(splitedBGR[1])[0];
meanR = mean(splitedBGR[2])[0];
//计算R/G/B图像的增益
double gainR = 0, gainG = 0, gainB = 0;
gainR = (meanR + meanG + meanB) / (3 * meanR);
gainG = (meanR + meanG + meanB) / (3 * meanG);
gainB = (meanR + meanG + meanB) / (3 * meanB);
//计算增益后R/G/B图像
splitedBGR[0] = splitedBGR[0] * gainB;
splitedBGR[1] = splitedBGR[1] * gainG;
splitedBGR[2] = splitedBGR[2] * gainR;
//将三个单通道图像合成一个三通道图像
merge(splitedBGR, mDst);
return 0;
}
int AWB_PerfectReflect(InputArray src, OutputArray dst)
{
CV_Assert_2(src.channels() == 3, "AWB_PerfectReflect() src image must has 3 channels!");
Mat mSrc = src.getMat();
if (mSrc.empty())
{
std::cout << "AWB_PerfectReflect() src image can't be empty!" << std::endl;
return -1;
}
dst.create(mSrc.size(), mSrc.type());
Mat mDst = dst.getMat();
int sumHist[766] = {
0 };//max(R+G+B) = 255*3 = 765, 0~765->766
int maxVal = 0;
for (int i = 0; i < mSrc.rows; i++)
{
for (int j = 0; j < mSrc.cols; j++)
{
Vec3b p = mSrc.at<Vec3b>(i, j);
int sum = p[0] + p[1] + p[2];
sumHist[sum]++;
maxVal = maxVal > p[0] ? maxVal : p[0];
maxVal = maxVal > p[1] ? maxVal : p[1];
maxVal = maxVal > p[2] ? maxVal : p[2];
}
}
int totalPixels = 0;
for (int i = 765; i >= 0; i--)
{
totalPixels += sumHist[i];
}
CV_Assert_2(totalPixels == mSrc.rows*mSrc.cols, "sumHist pixels number isn't equal with image size!");
float ratio = 0.1;
int cumPixel = 0;
int threshold = 0;
for (int i = 765; i >= 0; i--)
{
cumPixel += sumHist[i];
if (cumPixel >= ratio * mSrc.rows* mSrc.cols)
{
threshold = i;
break;
}
}
int avgB = 0, avgG = 0, avgR = 0;
int countPixels = 0;
for (int i = 0; i < mSrc.rows; i++)
{
for (int j = 0; j < mSrc.cols; j++)
{
Vec3b p = mSrc.at<Vec3b>(i, j);
int sum = p[0] + p[1] + p[2];
if (sum > threshold)
{
countPixels++;
avgB += p[0];
avgG += p[1];
avgR += p[2];
}
}
}
avgB /= countPixels;
avgG /= countPixels;
avgR /= countPixels;
for (int i = 0; i < mSrc.rows; i++)
{
for (int j = 0; j < mSrc.cols; j++)
{
Vec3b p = mSrc.at<Vec3b>(i, j);
int B = p[0] * maxVal / avgB;
B = B > 255 ? 255 : B;
mDst.at<Vec3b>(i, j)[0] = (uchar)B;
int G = p[1] * maxVal / avgG;
G = G > 255 ? 255 : G;
mDst.at<Vec3b>(i, j)[1] = (uchar)G;
int R = p[2] * maxVal / avgR;
R = R > 255 ? 255 : R;
mDst.at<Vec3b>(i, j)[2] = (uchar)R;
}
}
return 0;
}
int sign(float value)
{
if (value > 0)
return 1;
else if (value == 0)
return 0;
else
return -1;
}
int AWB_DynamicThreshold(InputArray src, OutputArray dst)
{
CV_Assert(src.channels() == 3);
Mat mSrc = src.getMat();
CV_Assert(mSrc.empty() == false);
dst.create(mSrc.size(), mSrc.type());
Mat mDst = dst.getMat();
CV_Assert(mDst.empty() == false);
//将RGB图像转换为YCrCb图像
Mat ycrcb;
cvtColor(mSrc, ycrcb, COLOR_BGR2YCrCb);
CV_Assert(ycrcb.empty() == false);
//分离YCrCb图像为单通道图像
std::vector<Mat> splitYCrCb;
splitYCrCb.reserve(3);
split(ycrcb, splitYCrCb);
CV_Assert(splitYCrCb.size() == 3);
//将图像分成3x4 12个区域
std::vector<Mat> splitAreas_Cr;
splitAreas_Cr.reserve(12);
std::vector<Mat> splitAreas_Cb;
splitAreas_Cb.reserve(12);
for (int i = 0; i < 3; i++)
{
for (int j = 0; j < 4; j++)
{
int rowStart = i*(mSrc.rows / 3);
int rowEnd = (i + 1)*(mSrc.rows / 3) - 1;
int colStart = j*(mSrc.cols / 4);
int colEnd = (j + 1)*(mSrc.cols / 4) - 1;
Mat areaCr = splitYCrCb[1](Range(rowStart, rowEnd), Range(colStart, colEnd));
splitAreas_Cr.push_back(areaCr);
Mat areaCb = splitYCrCb[2](Range(rowStart, rowEnd), Range(colStart, colEnd));
splitAreas_Cb.push_back(areaCb);
}
}
CV_Assert(splitAreas_Cr.size() == 12);
CV_Assert(splitAreas_Cb.size() == 12);
//统计每个区域Cr,Cb均值
float splitAreas_Cr_Mean[12] = {
0 };
float splitAreas_Cb_Mean[12] = {
0 };
for (int i=0; i<12; i++)
{
splitAreas_Cb_Mean[i] = mean(splitAreas_Cb[i])[0];
splitAreas_Cr_Mean[i] = mean(splitAreas_Cr[i])[0];
}
//统计每个区域Cr,Cb偏差值
float splitAreas_Cr_Std[12] = {
0 };
float splitAreas_Cb_Std[12] = {
0 };
int splitAreas_Pixels[12] = {
0 };
for (int k = 0; k<12; k++)
{
for (int i = 0; i < splitAreas_Cb[k].rows; i++)
{
for (int j = 0; j < splitAreas_Cb[k].cols; j++)
{
/*splitAreas_Cb_Std[k] += abs(splitAreas_Cb[k].at<uchar>(i, j) - splitAreas_Cb_Mean[k]);
splitAreas_Cr_Std[k] += abs(splitAreas_Cr[k].at<uchar>(i, j) - splitAreas_Cr_Mean[k]);*/
splitAreas_Cb_Std[k] += pow(splitAreas_Cb[k].at<uchar>(i, j) - splitAreas_Cb_Mean[k], 2);
splitAreas_Cr_Std[k] += pow(splitAreas_Cr[k].at<uchar>(i, j) - splitAreas_Cr_Mean[k], 2);
splitAreas_Pixels[k]++;
}
}
}
for (int k = 0; k < 12; k++)
{
splitAreas_Cb_Std[k] /= splitAreas_Pixels[k];
splitAreas_Cr_Std[k] /= splitAreas_Pixels[k];
}
//根据每个分块的均值和偏差,计算整个图像的均值和偏差,如果分块的Cb,Cr值过小,则忽略该模块
float meanCb = 0, meanCr = 0, stdCb = 0, stdCr = 0;
int areaNum = 0;
for (int k = 0; k < 12; k++)
{
if (splitAreas_Cb_Std[k] > 0.01 && splitAreas_Cr_Std[k] > 0.01)
{
areaNum++;
meanCb += splitAreas_Cb_Mean[k];
meanCr += splitAreas_Cr_Mean[k];
stdCb += splitAreas_Cb_Std[k];
stdCr += splitAreas_Cr_Std[k];
}
}
meanCb /= areaNum;
meanCr /= areaNum;
stdCb /= areaNum;
stdCr /= areaNum;
//选择候选白点
std::vector<Vec2i> yHist[256];//记录0-255每一像素值的像素点的坐标 - 符合候选白点条件的像素
int candinateWhitePixelNum = 0;
int maxYVal = 0;
for (int i = 0; i < splitYCrCb[0].rows; i++)
{
for (int j = 0; j < splitYCrCb[0].cols; j++)
{
bool bCr = std::abs(splitYCrCb[1].at<uchar>(i, j) - (1.5 * meanCr + stdCr /** sign(meanCr)*/)) < 1.5 * stdCr;
bool bCb = std::abs(splitYCrCb[2].at<uchar>(i, j) - (meanCb + stdCb /** sign(meanCb)*/)) < 1.5 * stdCb;
int yValue = splitYCrCb[0].at<uchar>(i, j);
maxYVal = maxYVal > yValue ? maxYVal : yValue;
if (bCr && bCb)
{
yHist[yValue].push_back(Vec2i(i, j));
candinateWhitePixelNum++;
}
}
}
int ratio = 0.1;//获取候选白点中亮度值从高到低前10%作为参考白点
int cumNum = 0;//记录候选白点亮度值从高到低累积像素数
int yThreshold = 0;
for (int i = 255; i >=0; i--)
{
cumNum += yHist[i].size();
if (cumNum > ratio * candinateWhitePixelNum)
{
yThreshold = i;
break;
}
}
//计算参考白点R,G,B三通道均值
float avgwR = 0, avgwG = 0, avgwB = 0;
int whitePixelNum = 0;
for (int i = 255; i >= yThreshold; i--)
{
for (int j = 0; j < yHist[i].size(); j++)
{
avgwB += mSrc.at<Vec3b>(yHist[i][j][0], yHist[i][j][1])[0];
avgwG += mSrc.at<Vec3b>(yHist[i][j][0], yHist[i][j][1])[1];
avgwR += mSrc.at<Vec3b>(yHist[i][j][0], yHist[i][j][1])[2];
}
whitePixelNum += yHist[i].size();
}
avgwB /= whitePixelNum;
avgwG /= whitePixelNum;
avgwR /= whitePixelNum;
//计算增益系数,为了让校正后的图像亮度和原图像亮度一致,计算增益时将Y通道最大值作为参考
float gainR = maxYVal / avgwR;
float gainG = maxYVal / avgwG;
float gainB = maxYVal / avgwB;
//矫正图像
for (int i = 0; i < mSrc.rows; i++)
{
for (int j = 0; j < mSrc.cols; j++)
{
int B = (int)(mSrc.at<Vec3b>(i,j)[0] * gainB);
mDst.at<Vec3b>(i, j)[0] = B > 255 ? 255 : B;
int G = (int)(mSrc.at<Vec3b>(i, j)[1] * gainG);
mDst.at<Vec3b>(i, j)[1] = G > 255 ? 255 : G;
int R = (int)(mSrc.at<Vec3b>(i, j)[2] * gainR);
mDst.at<Vec3b>(i, j)[2] = R > 255 ? 255 : R;
}
}
return 0;
}
int main()
{
std::string imgPath = "C:\\Temp\\common\\Workspace\\Opencv\\images\\awb_grayworld.jpg";
Mat src = imread(imgPath);
Mat dstGW;
int status = AWB_GrayWorld(src, dstGW);
if (status != 0)
goto EXIT;
imshow("src", src);
imshow("AWB GrayWorld", dstGW);
//waitKey(0);
{
Mat dstPR;
status = AWB_PerfectReflect(src, dstPR);
if (status != 0)
goto EXIT;
imshow("AWB PerfectReflect", dstPR);
//waitKey(0);
}
{
Mat dstDT;
status = AWB_DynamicThreshold(src, dstDT);
if (status != 0)
goto EXIT;
imshow("AWB DynamicThreshold", dstDT);
waitKey(0);
}
EXIT:
system("pause");
destroyAllWindows();
return 0;
}
3. 运行结果
原图:
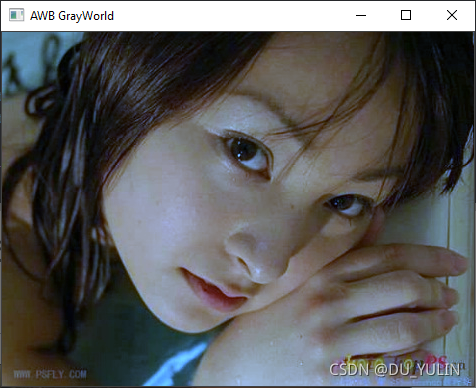
灰度世界算法:
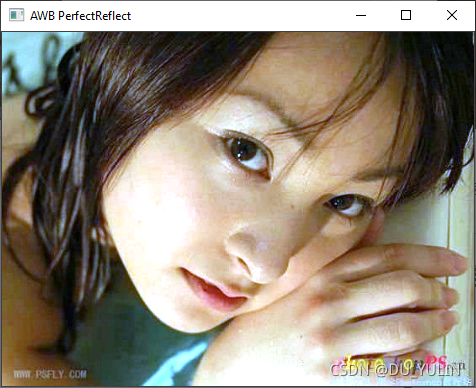
完美反射算法:
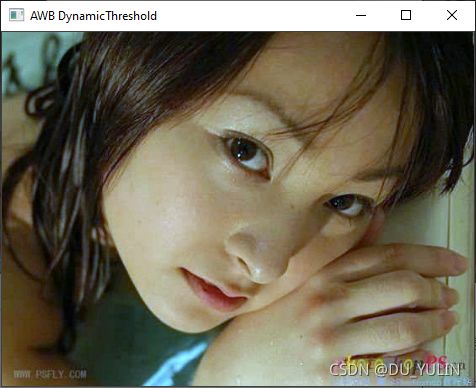
YCrCb动态阈值算法:
总结
在实现该算法的过程中,发现如果按照论文中根据差值绝对值的方式计算 D c r , D c b D_{cr}, D_{cb} Dcr,Dcb,找不到候选白点,矫正后的图像就是全黑的;本人使用方差的方式计算 D c r , D c b D_{cr}, D_{cb} Dcr,Dcb,得到比较好的结果,不知道是不是因为转换YCrCb颜色空间时使用OpenCV提供的接口来实现的原因( 0 ≤ C r ( i , j ) ≤ 255 , 0 ≤ C b ( i , j ) ≤ 255 0\leq Cr(i,j)\leq 255, 0\leq Cb(i,j)\leq 255 0≤Cr(i,j)≤255,0≤Cb(i,j)≤255)。
参考
https://www.csie.ntu.edu.tw/~fuh/personal/ANovelAutomaticWhiteBalanceMethodforDigital.pdf
https://www.cnblogs.com/Imageshop/archive/2013/04/20/3032062.html