因项目需要,要将道路实时的点云流在经过算法处理后在web端显示出来。其中用到点云检测算法,然后发布相应的处理后的点云topic。在web端相应位置创建3Dview接收显示。
主要是用到 ros3djs、rosbridge_server、tf2_web_republisher
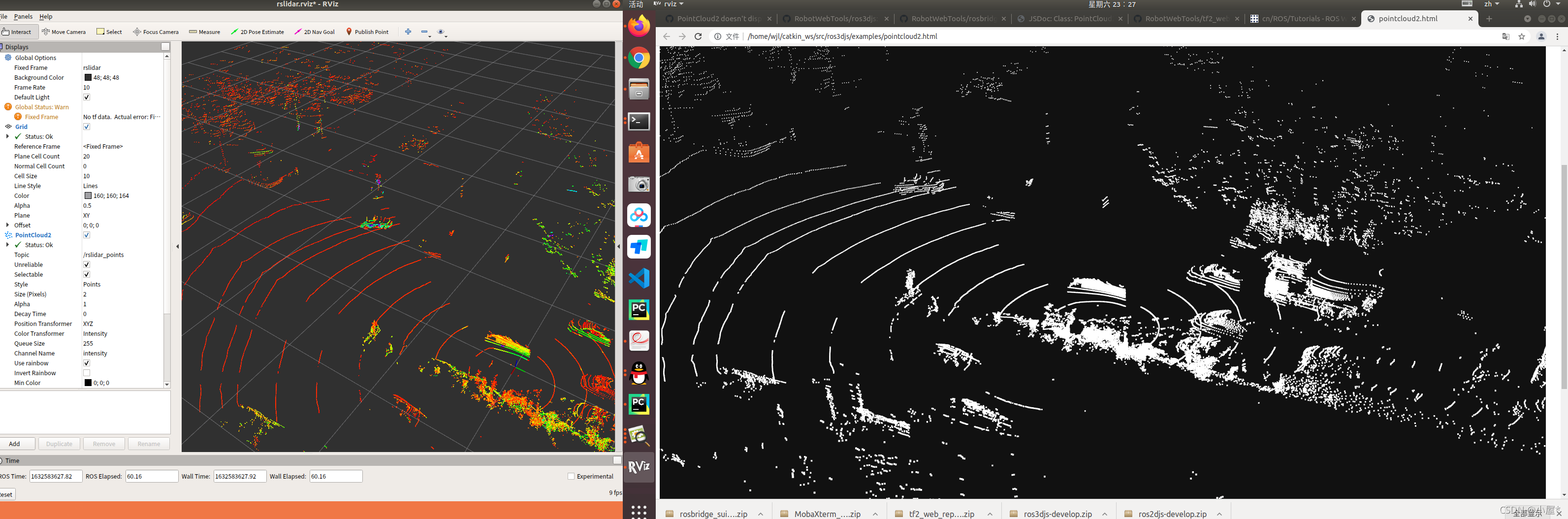
效果如下:(左侧为rviz显示效果,右侧为web端接收效果)
web端接收实时点云流并显示
视频地址:web端接收实时点云流并显示
1 创建工作空间
2 依赖包下载
分别进这三者的github上下载相应的代码,ros3djs、tf2_web_republisher。对于rosbridge_server,只需要sudo apt-get install ros-melodic-rosbridge-suite。
将上述文件夹解压至上面创建好的工作空间里的src文件夹下:

返回至catkin_ws,然后catkin_make
3 更改点云信息
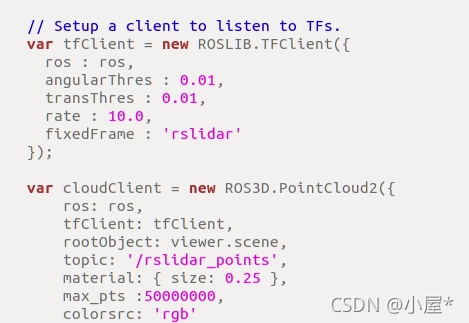
打开pointcloud2.html进行修改:
 主要修改fixedFrame和topic(改为自己发布的点云参数):
主要修改fixedFrame和topic(改为自己发布的点云参数):
4 启动




发布自己的点云topic:

5 显示效果
6 官网文档
http://robotwebtools.org/jsdoc/ros3djs/current/ROS3D.PointCloud2.html
http://wiki.ros.org/ros3djs
报错解决:
 打开该文件:/opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake
打开该文件:/opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake
将96行set(_include_dirs "include;/usr/include;/usr/include/opencv")改为:set(_include_dirs "include;/usr/include;/usr/local/include/opencv")

 重新catkin_make
重新catkin_make