How to publish a pointcloud of ros msgs in a topic from a pcd file?
Two methods
1. modified source
2. pcd_to_pointcloud
- run ros node pcl_ros in a terminal
usage:
$ rosrun pcl_ros pcd_to_pointcloud <file.pcd> [ <interval> ] Loads a PCD file, publishing it one or more times as a ROS point cloud message.
Published Topics
- cloud_pcd (sensor_msgs/PointCloud2)
// A stream of point clouds generated from the PCD file.
// <interval> is the (optional) number of seconds to sleep between messages.
// If <interval> is zero or not specified the message is published once.- in my condition, I use
// can add _frame_id:=/camera_link
$ rosrun pcl_ros pcd_to_pointcloud /home/william/demos/cylinders/preprocessing/data/realSense02.pcd 10 _frame_id:=/camera_link- run rviz:
$ rosrun rviz rviz
If the frame id you add is not camera_link, then should be edit.
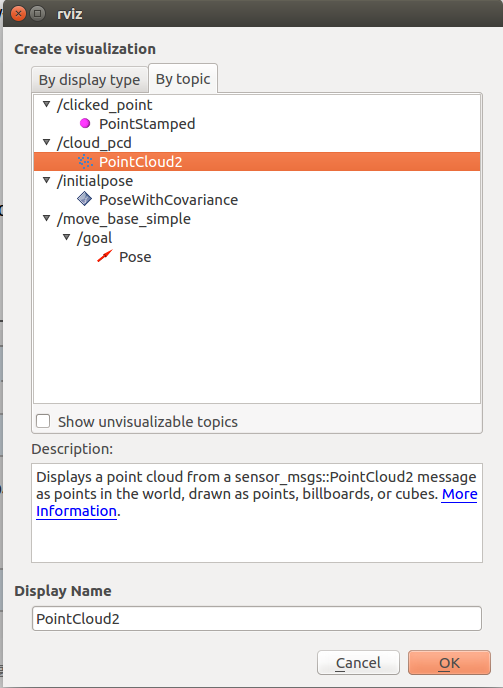
click 'Add', click 'By topic', choose 'Pointcloud2' below topic '/cloud_pcd'. Then the pointcloud can be visualized.