个人微信公众号

keras-yolov3源码
git clone https://github.com/qqwweee/keras-yolo3.git
目录
- 测试图片的准备
- 数据标签文件的格式转换(XML转换为txt格式)
- 模型对测试图片的检测以及检测结果坐标文件的生成
- MAP测试
- 结果
说明:
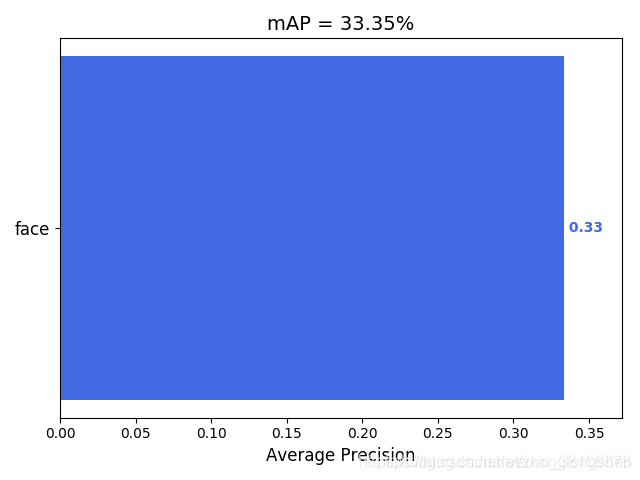
- 本次试验中,map的测试采用的是人脸图片数据;
- 本试验中模型的训练/MAP测试只使用了部分试验数据,因此,最后的MAP值并不高,仅供参考;
一、测试图片准备
1:首先,从GitHub上下载相关的代码,并保存到keras_yolo项目文件夹内;
git clone https://github.com/Cartucho/mAP
2:进入mAP子目录,将需要测试的图片以及图片对应的XML文件放置对应的文件夹内;
测试图片放入的目录为: mAP/input/images-optional
图片对应的XML放入的目录为:mAP/input/ground-truth
二、 测试图片的标签格式转换(.txt)
本次测试中,数据格式是的VOC格式,查询文件中Readme发现,有现成的代码可用,无需做修改;
打开终端,进入子目录、运行代码:
cd mAP/scripts/extra
python convert_gt_xml.py
代码运行完后,测试数据的GT坐标会保存在对应的txt文件内,XML文件会另存在目录中的backup文件夹内;
三、 模型对测试图片进行测试并生成结果坐标信息保存至txt文件
1.测试代码如下,需放置在keras_yolo/ 项目文件夹下,与yolo_video.py在同级目录;
2.运行代码,将会生成对应的测试结果并保存在指定的目录中;
python yolo_detect.py
# -*- coding: utf-8 -*-
"""
Class definition of YOLO_v3 style detection model on image and video
"""
import colorsys
import os
import sys
from timeit import default_timer as timer
import numpy as np
from keras import backend as K
from keras.models import load_model
from keras.layers import Input
from PIL import Image, ImageFont, ImageDraw
from yolo3.model import yolo_eval, yolo_body, tiny_yolo_body
from yolo3.utils import letterbox_image
import os
from keras.utils import multi_gpu_model
class YOLO(object):
_defaults = {
"model_path": '/your/path/to/keras-yolo3/model_data/face_h5/face.h5', ##训练好的模型的路径
"anchors_path": 'model_data/tiny_yolo_anchors.txt',
"classes_path": 'model_data/face.txt',
"score" : 0.3,
"iou" : 0.45,
"model_image_size" : (416, 416),
"gpu_num" : 0
}
@classmethod
def get_defaults(cls, n):
if n in cls._defaults:
return cls._defaults[n]
else:
return "Unrecognized attribute name '" + n + "'"
def __init__(self, **kwargs):
self.__dict__.update(self._defaults) # set up default values
self.__dict__.update(kwargs) # and update with user overrides
self.class_names = self._get_class()
self.anchors = self._get_anchors()
self.sess = K.get_session()
self.boxes, self.scores, self.classes = self.generate()
def _get_class(self):
classes_path = os.path.expanduser(self.classes_path)
with open(classes_path) as f:
class_names = f.readlines()
class_names = [c.strip() for c in class_names]
return class_names
def _get_anchors(self):
anchors_path = os.path.expanduser(self.anchors_path)
with open(anchors_path) as f:
anchors = f.readline()
anchors = [float(x) for x in anchors.split(',')]
return np.array(anchors).reshape(-1, 2)
def generate(self):
model_path = os.path.expanduser(self.model_path)
assert model_path.endswith('.h5'), 'Keras model or weights must be a .h5 file.'
# Load model, or construct model and load weights.
num_anchors = len(self.anchors)
num_classes = len(self.class_names)
is_tiny_version = num_anchors==6 # default setting
try:
self.yolo_model = load_model(model_path, compile=False)
except:
self.yolo_model = tiny_yolo_body(Input(shape=(None,None,3)), num_anchors//2, num_classes) \
if is_tiny_version else yolo_body(Input(shape=(None,None,3)), num_anchors//3, num_classes)
self.yolo_model.load_weights(self.model_path) # make sure model, anchors and classes match
else:
assert self.yolo_model.layers[-1].output_shape[-1] == \
num_anchors/len(self.yolo_model.output) * (num_classes + 5), \
'Mismatch between model and given anchor and class sizes'
print('{} model, anchors, and classes loaded.'.format(model_path))
# Generate colors for drawing bounding boxes.
hsv_tuples = [(x / len(self.class_names), 1., 1.)
for x in range(len(self.class_names))]
self.colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples))
self.colors = list(
map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)),
self.colors))
np.random.seed(10101) # Fixed seed for consistent colors across runs.
np.random.shuffle(self.colors) # Shuffle colors to decorrelate adjacent classes.
np.random.seed(None) # Reset seed to default.
# Generate output tensor targets for filtered bounding boxes.
self.input_image_shape = K.placeholder(shape=(2, ))
if self.gpu_num>=2:
self.yolo_model = multi_gpu_model(self.yolo_model, gpus=self.gpu_num)
boxes, scores, classes = yolo_eval(self.yolo_model.output, self.anchors,
len(self.class_names), self.input_image_shape,
score_threshold=self.score, iou_threshold=self.iou)
return boxes, scores, classes
def detect_image(self, image):
start = timer()
if self.model_image_size != (None, None):
assert self.model_image_size[0]%32 == 0, 'Multiples of 32 required'
assert self.model_image_size[1]%32 == 0, 'Multiples of 32 required'
boxed_image = letterbox_image(image, tuple(reversed(self.model_image_size)))
else:
new_image_size = (image.width - (image.width % 32),
image.height - (image.height % 32))
boxed_image = letterbox_image(image, new_image_size)
image_data = np.array(boxed_image, dtype='float32')
print(image_data.shape)
image_data /= 255.
image_data = np.expand_dims(image_data, 0) # Add batch dimension.
out_boxes, out_scores, out_classes = self.sess.run(
[self.boxes, self.scores, self.classes],
feed_dict={
self.yolo_model.input: image_data,
self.input_image_shape: [image.size[1], image.size[0]],
K.learning_phase(): 0
})
print('Found {} boxes for {}'.format(len(out_boxes), 'img'))
font = ImageFont.truetype(font='font/FiraMono-Medium.otf',
size=np.floor(3e-2 * image.size[1] + 0.5).astype('int32'))
thickness = (image.size[0] + image.size[1]) // 300
for i, c in reversed(list(enumerate(out_classes))):
predicted_class = self.class_names[c]
box = out_boxes[i]
score = out_scores[i]
label = '{} {:.2f}'.format(predicted_class, score)
draw = ImageDraw.Draw(image)
label_size = draw.textsize(label, font)
top, left, bottom, right = box
top = max(0, np.floor(top + 0.5).astype('int32'))
left = max(0, np.floor(left + 0.5).astype('int32'))
bottom = min(image.size[1], np.floor(bottom + 0.5).astype('int32'))
right = min(image.size[0], np.floor(right + 0.5).astype('int32'))
print(label, (left, top), (right, bottom))
#new_f=open("/home/shan/xws/pro/keras-yolo3/detection-results/"+tmp_file.replace(".jpg", ".txt"), "a")
new_f.write("%s %s %s %s %s\n" % (label, left, top, right, bottom))
if top - label_size[1] >= 0:
text_origin = np.array([left, top - label_size[1]])
else:
text_origin = np.array([left, top + 1])
# My kingdom for a good redistributable image drawing library.
for i in range(thickness):
draw.rectangle(
[left + i, top + i, right - i, bottom - i],
outline=self.colors[c])
draw.rectangle(
[tuple(text_origin), tuple(text_origin + label_size)],
fill=self.colors[c])
draw.text(text_origin, label, fill=(0, 0, 0), font=font)
del draw
end = timer()
print(end - start)
return image
def close_session(self):
self.sess.close()
if __name__ == '__main__':
# yolo=YOLO()
# path = '1.jpg'
# try:
# image = Image.open(path)
# except:
# print('Open Error! Try again!')
# else:
# r_image = yolo.detect_image(image)
# r_image.show()
# yolo.close_session()
#strat1=timer()
dirname="/your/path/to/map/input/image-optional/" ##该目录为测试照片的存储路径,每次测试照片的数量可以自己设定
path=os.path.join(dirname)
pic_list=os.listdir(path)
count=0
yolo=YOLO()
for filename in pic_list:
tmp_file=pic_list[count]
new_f=open("/your/path/to/map/input/detection-results/"+tmp_file.replace(".jpg", ".txt"), "a") #预测坐标生成txt文件保存的路径
abs_path=path+pic_list[count]
image = Image.open(abs_path)
r_image = yolo.detect_image(image)
count=count+1
#end1=timer()
print(count)
yolo.close_session()
四、 MAP结果测试
python main.py
五、 MAP结果(一类/部分少量数据测试结果)