一、简介
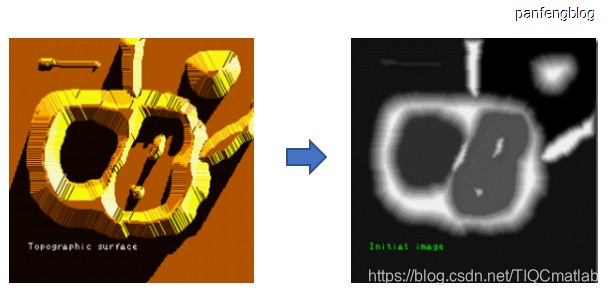
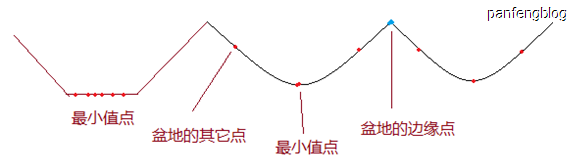
分水岭算法是一种图像区域分割法,分割的过程中将图片转化为灰度图,然后我会将灰度值看作是海拔,然后向较低点注水,这种基于地形学的解释,我们着重考虑三种点:
极小值点,该点对应一个盆地的最低点,当我们在盆地里滴一滴水的时候,由于重力作用,水最终会汇聚到该点。注意:可能存在一个最小值面,该平面内的都是极小值点。
盆地的其它位置点,该位置滴的水滴会汇聚到局部最小点。
盆地的边缘点,是该盆地和其它盆地交接点,在该点滴一滴水,会等概率的流向任何一个盆地。
明白上述三种点之后,我们开始往盆地的极小值点注水,然后随着注水的深入,每一个极小值点慢慢的向外扩展,然后知道两个盆地的水汇合,汇合处就是我们需要的分水岭。
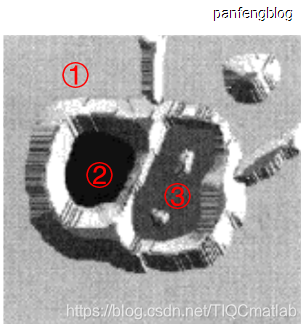
从下图可以直观理解一下,首先这三块区域都含有极小值点
然后逐渐填充就能获得分水岭(即分界线)
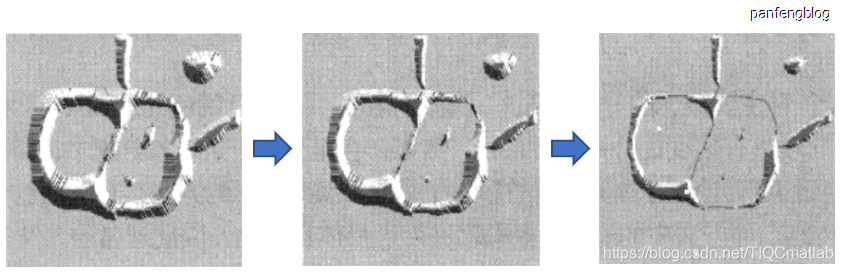
得到分界线就能完成图像分割:
二、源代码
function susanseg
clear all; close all; clc
image= imread('cell.jpg');
% 用SUSAN算法进行边缘检测
image = susan(image,4);
figure, imshow(image,[]);
%imwrite(image, './susanout/susanout.jpg');
% 将image转为二值图像保存后,用图像处理工具
% 把其背景的所有连通区域处理为黑色,即只有细
% 胞体是白色,便于细胞数目的搜索
BW = im2bw(image, graythresh(image));
bounder_area = length(find(BW==0));
%imwrite(BW, './susanout/bw.jpg');
figure, imshow(BW);
% 申明全局变量
global B Dir m n;
B = imread('./blackbackground.jpg');
B = im2bw(B, graythresh(B));
[m,n] = size(B);
figure, imshow(B);
% 细胞的总面积,即细胞所占的像素数目,包括细胞的边界
% 由于SUSAN提取出的边界已被增宽,所以将边界像素数除以2
% 来作为细胞的边界像素数目
total_area = length(find(B==1)) + bounder_area/2;
NUM = 5; % 细胞面积阈值
count = 0; % 细胞总数
% 搜索方向向量,4邻域搜索
Dir = [-1 0; 0 1; 1 0; 0 -1;];
% 搜索方向向量,8邻域搜索
%Dir = [-1 0; -1 1; 0 1; 1 1; 1 0; 1 -1; 0 -1; -1 -1;];
for i = 1:m
for j = 1:n
if B(i,j)==1 % 是细胞像素
num = search(i,j,4) + 1; % 计算该细胞的像素数目
if num>NUM
count = count + 1;
else
total_area = total_area - num; % 减掉不是细胞的面积
end
end
end
end
%fid = fopen('./susanout/results.txt', 'wt');
fprintf('图像尺寸: %d * %d, SUSAN阈值: 4, 细胞面积阈值: %d\n', ...
n, m, NUM);
fprintf('细胞总数: %d, 细胞总面积: %.2f, 平均细胞面积: %.2f\n', ...
count, total_area, total_area/count);
%fprintf(fid,'图像尺寸: %d * %d, SUSAN阈值: 4, 细胞面积阈值: %d\n', ...
% n, m, NUM);
%fprintf(fid,'细胞总数: %d, 细胞总面积: %.2f, 平均细胞面积: %.2f\n', ...
% count, total_area, total_area/count);
%fclose(fid);
end
% -----------------------------------------------------------------------
%
% This function uses the SUSAN algorithm to find edges within an image
%
%
% >>image_out = susan(image_in,threshold)
%
%
% Input parameters ... The gray scale image, and the threshold
% image_out .. (class: double) image indicating found edges
% typical threshold values may be from 10 to 30
%
%
%The following steps are performed at each image pixel:
% ( from the SUSAN webpage, http://www.fmrib.ox.ac.uk/~steve/susan/susan/node4.html )
%
% Place a circular mask around the pixel in question.
% Calculate the number of pixels within the circular mask which have similar brightness to
% the nucleus. These define the USAN.
% Subtract USAN size from geometric threshold to produce edge strength image.
%
% Estimating moments to find the edge direction has not been implemented .
% Non-maximal suppresion to remove weak edges has not been implemented yet.
%
% example:
%
% >> image_in=imread('test_pattern.tif');
% >> image = susan(image_in,27);
% >> imshow(image,[])
%
%
% Abhishek Ivaturi
%
% -------------------------------------------------------------------------
function image_out = susan(im,threshold)
% check to see if the image is a color image...
%im= imread('test_pattern.tif')
%threshold=27;
d = length(size(im));
if d==3
image=double(rgb2gray(im));
elseif d==2
image=double(im);
end
% mask for selecting the pixels within the circular region (37 pixels, as
% used in the SUSAN algorithm
mask = ([ 0 0 1 1 1 0 0 ;0 1 1 1 1 1 0;1 1 1 1 1 1 1;1 1 1 1 1 1 1;1 1 1 1 1 1 1;0 1 1 1 1 1 0;0 0 1 1 1 0 0]);
% the output image indicating found edges
R=zeros(size(image));
% define the USAN area
nmax = 3*37/4;
% padding the image
[a b]=size(image);
new=zeros(a+7,b+7);
[c d]=size(new);
new(4:c-4,4:d-4)=image;
for i=4:c-4
for j=4:d-4
current_image = new(i-3:i+3,j-3:j+3);
current_masked_image = mask.*current_image;
% Uncomment here to implement binary thresholding
% current_masked_image(find(abs(current_masked_image-current_masked_image(4,4))>threshold))=0;
% current_masked_image(find(abs(current_masked_image-current_masked_image(4,4))<=threshold))=1;
% This thresholding is more stable
current_thresholded = susan_threshold(current_masked_image,threshold);
g=sum(current_thresholded(:));
if nmax<g
R(i,j) = g-nmax;
else
R(i,j) = 0;
end
end
end
三、运行结果

四、备注
完整代码或者代写添加QQ 1564658423