双向广搜
当广搜中间遍历到的范围数量很大的时候,可以采用双向广搜。
AcWing 190. 字串变换
分析
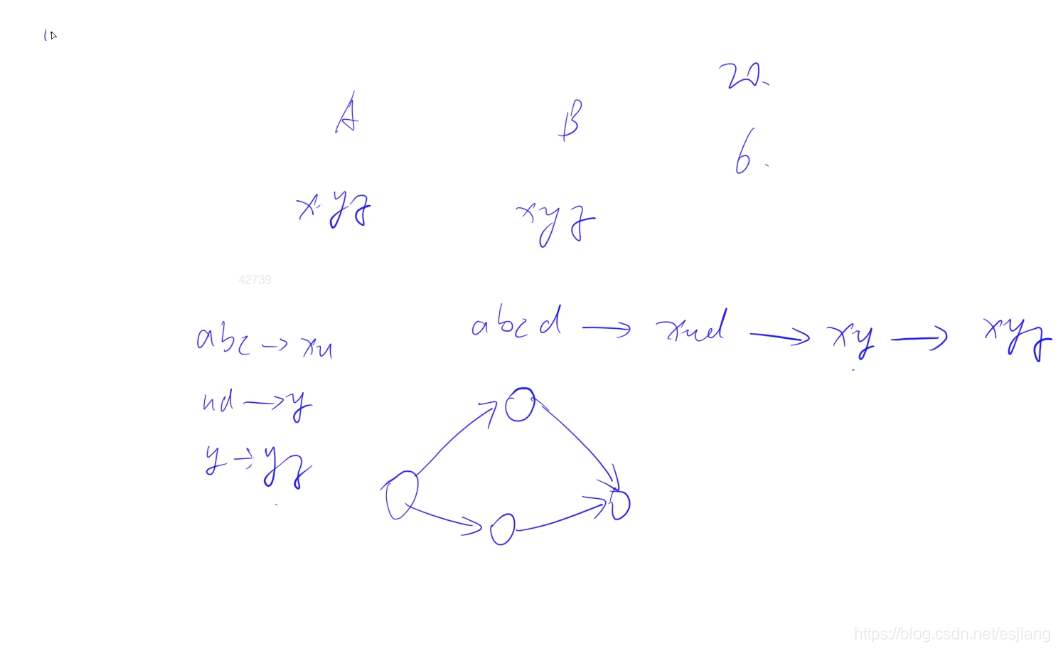
可以把每个字符串看成单独的状态,把所有可以从当前变化到的状态,看成是连接当前点和另外一个状态的边,这样就转化为图论的问题。
问:从A到B最少需要走几步
A,B的长度最多为20,规则有6个。估计下,直接爆搜,整个遍历到的数量有多少。
答案要求10步以内。
字符串从任意起点开始,都可以应用6个规则。20个字符,总共20个起始位置,一个位置可以扩展6个结果,20个位置可以扩展120个结果。最多10步。
总的时间复杂度 12 0 10 120^{10} 12010,就算假设每次只有一个位置可以往外扩展,也有 6 10 6^{10} 610
双向广搜效率问题
比如单路扩展, 6 10 6^{10} 610复杂度,那么双向广搜, 可以降低到 2 ∗ 6 5 2 * 6^5 2∗65, 6 10 / 2 ∗ 6 5 ≈ 3000 6^{10} /{2 * 6^5} \approx 3000 610/2∗65≈3000. 效果非常好
双向广搜使用范围
用在最小步数模型中, flood fill 和最短路模型,总共搜到的点数量不大。直接搜也不会爆时间。最小步数模型里,一般状态数量是指数级别,这样的话,用双向广搜,可以提高运行效率。
双向广搜写法
傻瓜式
每次从两个方向分别扩展一步
优化式
因为每次从两个方向扩展的空间大小不同,比如从起点扩展出来的空间非常大,但从终点扩展状态比较小。
因此可以选择队列中状态数量较小的方向去扩展,这样实际运行效率较高
代码
#include <iostream>
#include <cstring>
#include <queue>
#include <unordered_map>
using namespace std;
const int N = 6;
int n;
string a[N], b[N]; // 表示 a[i] -> b[i]的规则
int extend(queue<string>& q, unordered_map<string, int>& da, unordered_map<string, int>& db, string a[], string b[]){
// 因为队头总是弹出,q.size()每次循环都在变化,而k每次在++,所以要用sk表示初始队列的长度,使得能遍历整个队列
// 不然的话, q.size() --, k ++, 那就不正确了
for (int k = 0, sk = q.size(); k < sk; k ++ ){
// 每次需要扩展一层
string t = q.front(); q.pop();
for (int i = 0; i < t.size(); i ++ )// 枚举从哪个起点应用规则
for (int j = 0; j < n; j ++ ) // 枚举应用哪个规则
if (t.substr(i, a[j].size()) == a[j]){
string state = t.substr(0, i) + b[j] + t.substr(i + a[j].size()); // 前面保留 + 中间变化 + 后面保留
if (da.count(state)) continue;
if (db.count(state)) return da[t] + 1 + db[state];
da[state] = da[t] + 1;
q.push(state);
}
}
return 11;
}
int bfs(string A, string B){
queue<string> qa, qb;
unordered_map<string, int> da, db;
qa.push(A), da[A] = 0;
qb.push(B), db[B] = 0;
while (qa.size() && qb.size()) {
int t;
if (qa.size() <= qb.size()) t = extend(qa, da, db, a, b);
else t = extend(qb, db, da, b, a);
if (t <= 10) return t;
}
return 11;
}
int main(){
string A, B;
cin >> A >> B;
while (cin >> a[n] >> b[n]) n ++;
int step = bfs(A, B);
if (step > 10) puts("NO ANSWER!");
else cout << step << endl;
return 0;
}
注意,扩展节点的时候一定要扩展一层
A*
介绍
当搜索的状态空间达到 1 0 7 , 1 0 8 10^7, 10^8 107,108, 甚至 1 0 20 10^{20} 1020, 可以采用{A*}算法,因为 启发函数减少搜索空间, 求出起点到终点的最短路径了。
因此A*算法不适合 搜索范围比较小的题目(不适合 Flood Fill, 最短路模型)
A*算法步骤
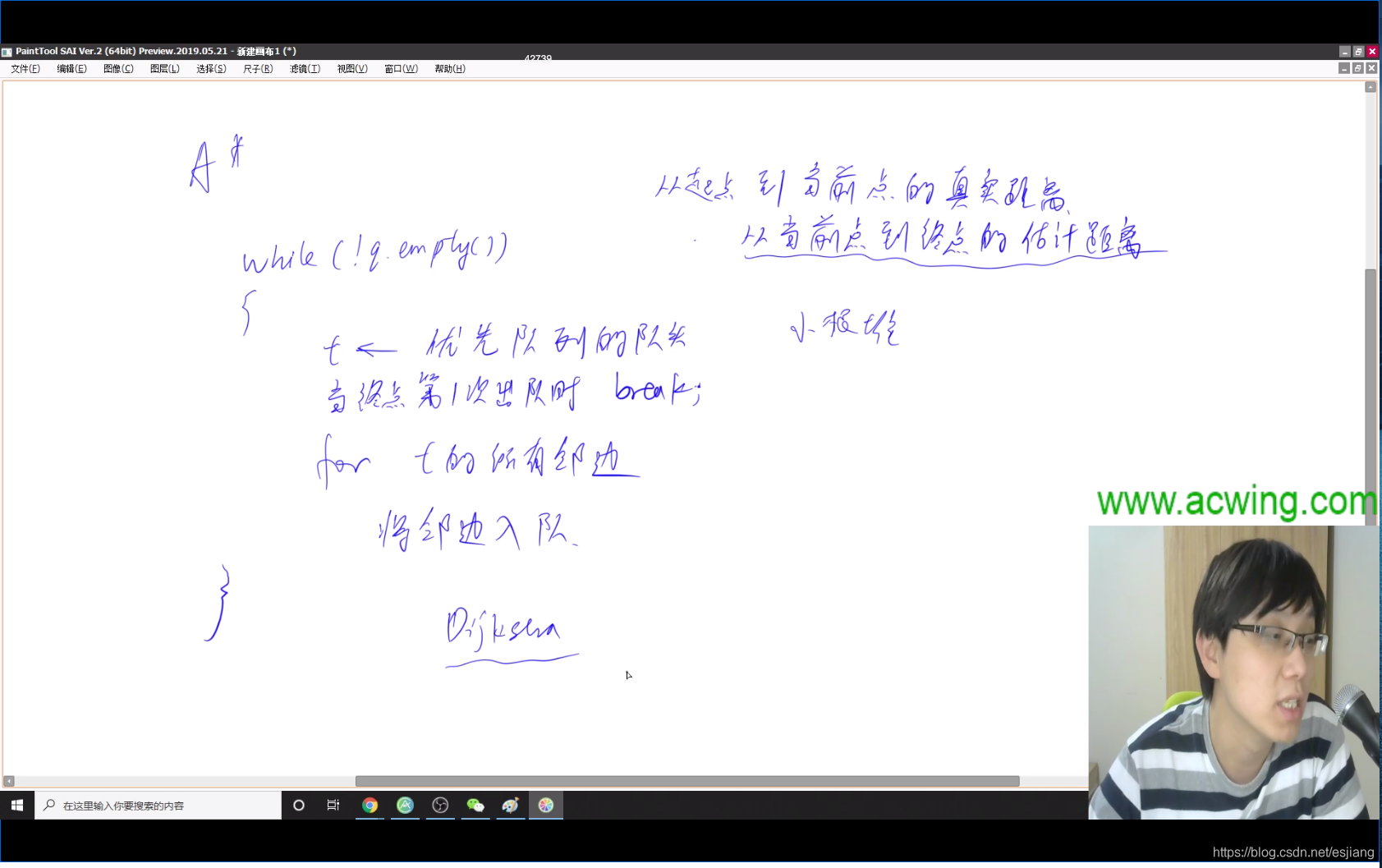
Dijkstra算法可以看成是{A*}算法估价函数为0的特殊情况
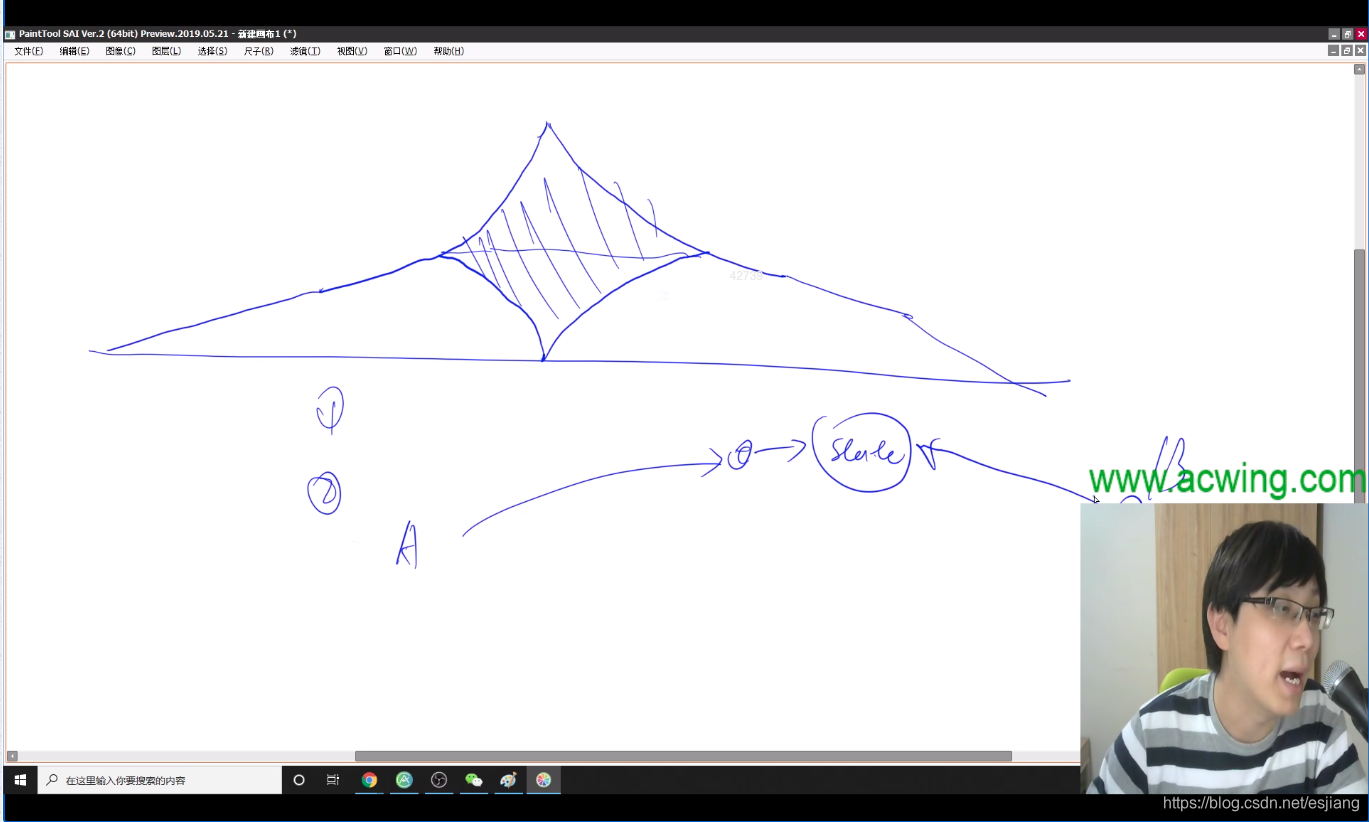
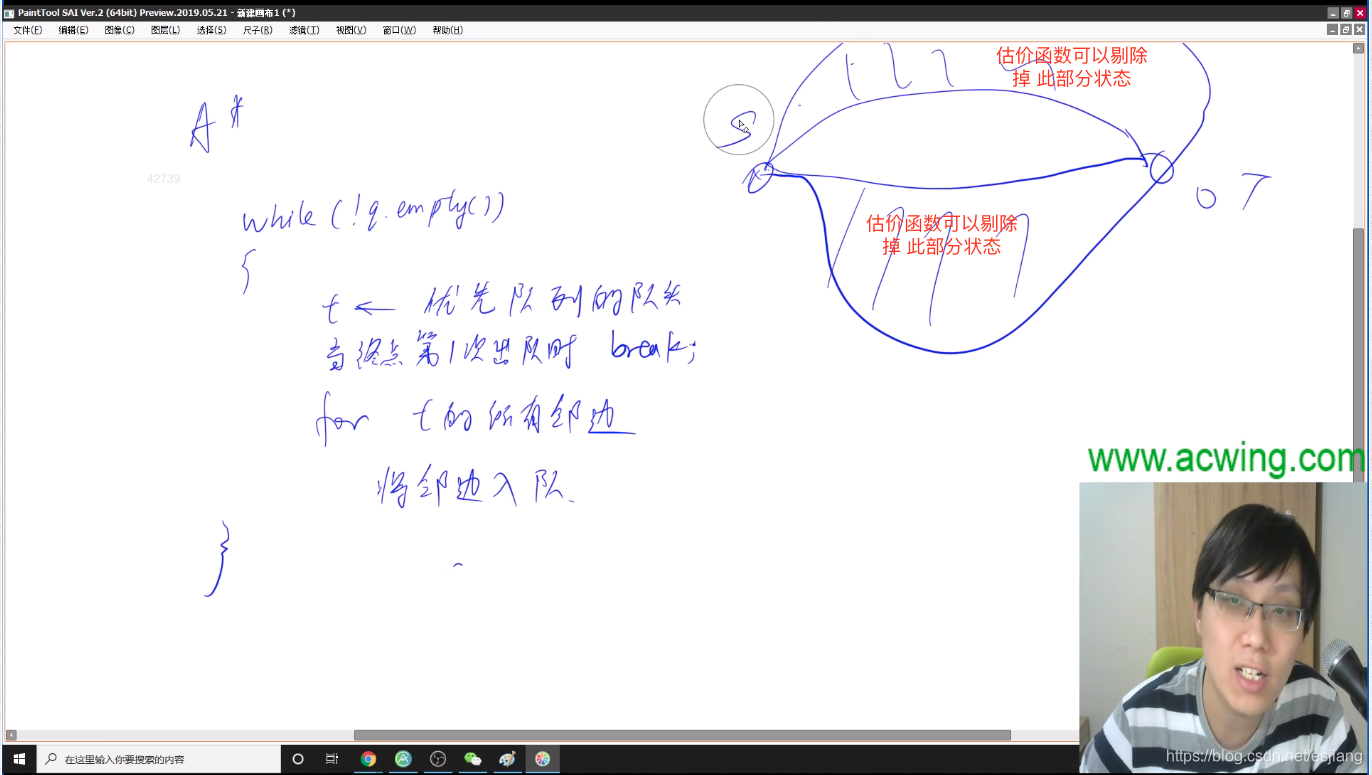
下图中估价函数可以剔除的原因是:这些点到终点的估价函数值非常大,因此可以值搜中间部分,就可以搜到最短距离。
证明:A*算法的正确性
当前状态: d(state)
当前状态到终点的距离: g(state)
当前状态到中间的估价距离:f(state)
条件:f(state) <= g(state)
证明: 假设终点 T T T第1次出队时不是最小值(指距离起点的最小值), 并且当前弹出的元素是T 那么有以下式子成立:
d T > d 最 优 . . . . . . . . ( 1 ) d_T > d_{最优} ........ (1) dT>d最优........(1)
在题目有解的情况下, 肯定存在最优路径上的某个点 u u u(至少起点在最优路径上)(在优先队列中,还没有被弹出),起点距离该点距离为 d u d_u du,那么
d ( u ) + f ( u ) ≤ d ( u ) + g ( u ) = d 最 优 . . . . . . ( 2 ) d(u) + f(u) \leq d(u) + g(u) = d_{最优} ......(2) d(u)+f(u)≤d(u)+g(u)=d最优......(2)
结合(1) 和(2) 可以得到以下式子
$d_T > d_{最优} \geq d(u) + f(u) > d(u) $
因此在优先队列中 u u u比 T T T 应该先弹出, 与当前是T弹出,矛盾。
重要:
《算法进阶指南》 说每个状态只需要被扩展一次,之后再被取出可以忽略 是错误的。
我们只能保证终点第一次取出,距离起点是最优的距离, 最多只能保证最优路径上的点距离是最优的。
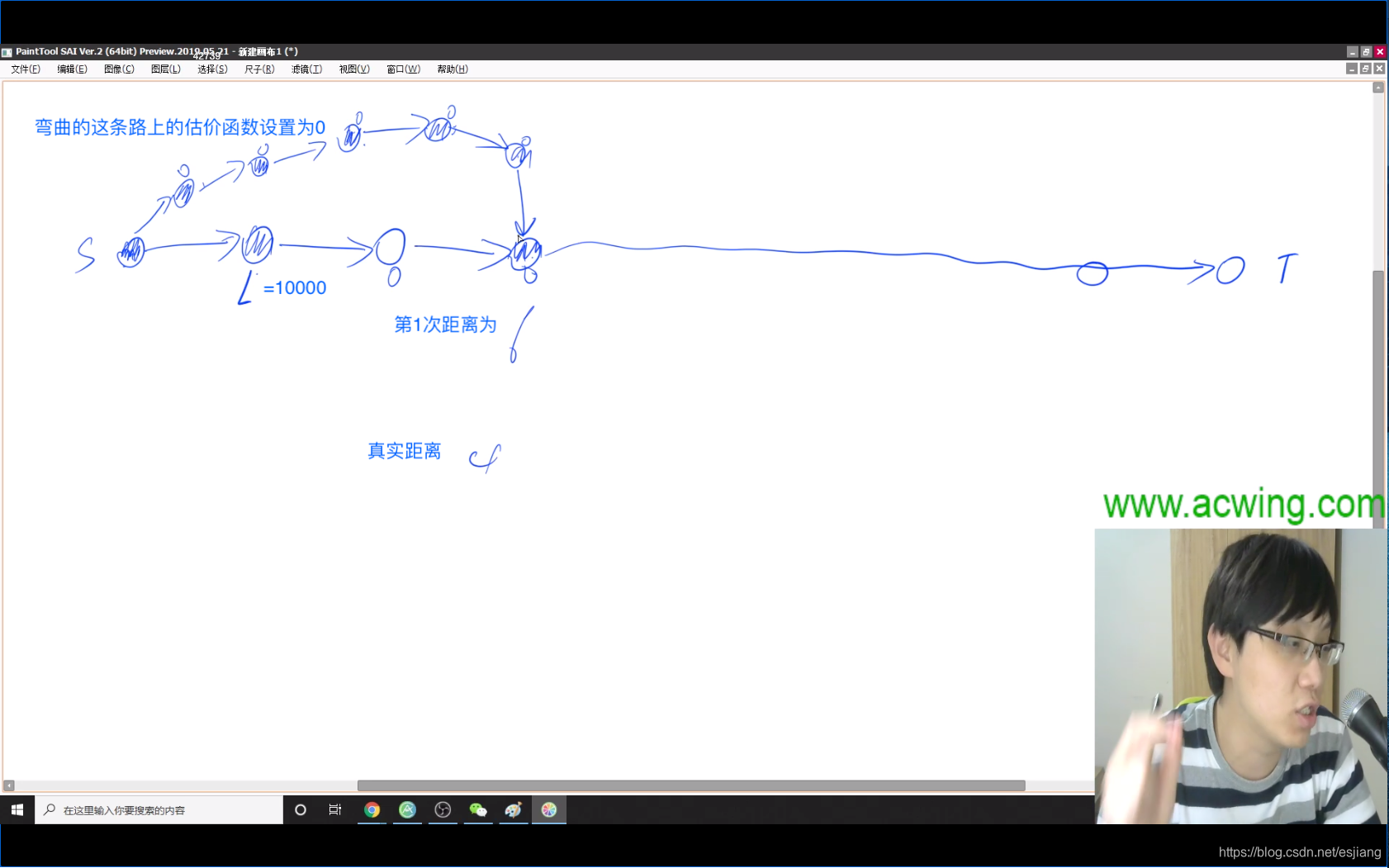
那么为什么最终会得到最优路径呢。
因为按照上面弯曲的路线走,走到后面某一步会发现距离为L + 1, 大于下面这条路径到起点的距离,就会拨乱反正,从下面笔直的路走。
(图中除了估价函数标记为L的点以外,其他点估价函数全取为0)

几个广搜算法的判重
BFS 每次状态只会入队一次,可以在入队的时候,判重,continue 跳过该点
Dijkstra, 说出队的时候,距离是最优的,因此可以在当前点第二次出队的时候continue,跳过该点
{A*}, 出队的时候,也不能判重(只有终点第一次出队,才是正确的),其他点出来一次,更新一次,出来一次,更新一次距离。
估价函数怎么取
一般会有传统的,成熟的取估价函数的方法,如果是一个比较新的问题,只能自己取猜一个 0 ≤ f ( ) ≤ g ( ) 0 \leq f() \leq g() 0≤f()≤g()。
其中 f f f表示估价函数, g g g表示真实距离。
题目不知道有没有解怎么办
{A*}算法只能保证在题目有解的情况可以搜,无解的话,不如朴素bfs, 实际应用中,不能事先知道有解没解,只能硬着头皮去写{A*}, 大部分情况下会比较快。
AcWing 179. 八数码
分析
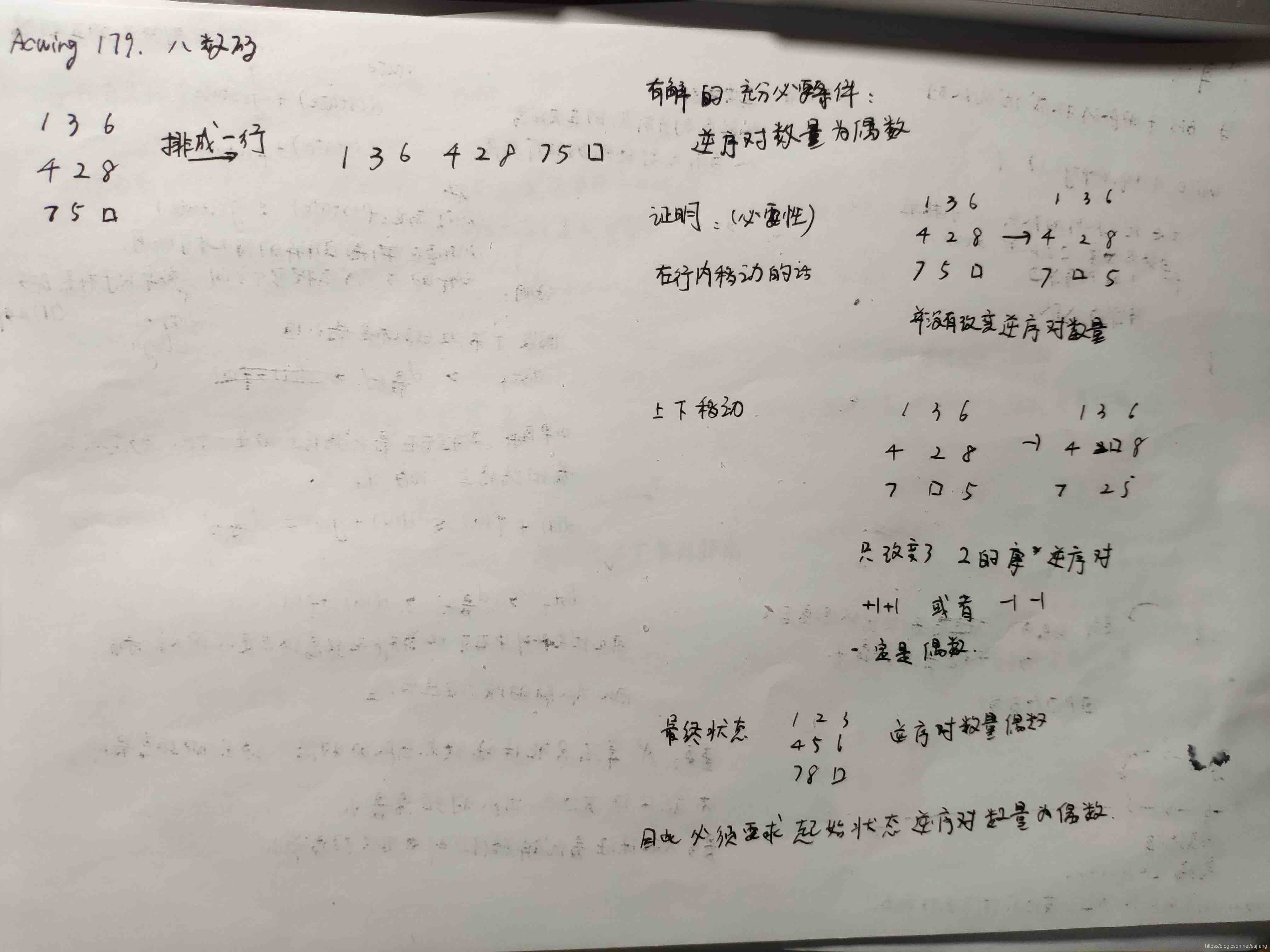
i < j , A i < A j i <j, A_i < A_j i<j,Ai<Aj称 < A i , A j > <A_i, A_j> <Ai,Aj>为一对逆序对.
有解的必要条件:逆序对为偶数
行内与X(空格交换的话),不改变逆序数。
上下行交换X与其他数,只会影响X与后面的数的逆序对。
估价函数的设计
每次某个数字与X(空格)交换, 最好的情况下会将当前状态与最终状态距离-1.
因此估价函数可以取当前每个数与目标位置之间的曼哈顿距离之和。
代码
#include <iostream>
#include <algorithm>
#include <unordered_map>
#include <queue>
using namespace std;
typedef pair<int, string> PIS;// 1.表示到起点的距离, 2表示当前的状态
int f(string state){
int res = 0;
for (int i = 0; i < state.size(); i ++ )
if (state[i] != 'x'){
int t = state[i] - '1'; // state是一行, 换算距离原点0的距离, 方便转换成3x3
res += abs(i / 3 - t / 3) + abs(i % 3 - t % 3);
}
return res;
}
string bfs(string start){
int dx[] = {
-1, 0, 1, 0}, dy[] = {
0, 1, 0, -1}; // 上右下左方向,不要混乱着写
char op[4] = {
'u', 'r', 'd', 'l'};
string end = "12345678x";
unordered_map<string, int> dist;
unordered_map<string, pair<string, char>> prev;
priority_queue<PIS, vector<PIS>, greater<PIS>> heap;
heap.push({
f(start), start});
dist[start] = 0;
while (heap.size()){
auto t = heap.top(); heap.pop();
string state = t.second;
if (state == end) break;
// 注意:heap中元素 第一个参数int是 当前点到起点距离 + 估价函数f,而不是到起点距离dist
// 要获得到起点距离,需要从dist中获取。
int step = dist[state];
int x, y;
// 取出x的位置
for (int i = 0; i < state.size(); i ++ )
if (state[i] == 'x'){
x = i / 3, y = i % 3;
break;
}
// 与x交换
string source = state;
for (int i = 0; i < 4; i ++ ){
int a = x + dx[i], b = y + dy[i];
if (a < 0 || a >= 3 || b < 0 || b >= 3) continue;
swap(state[x * 3 + y], state[a * 3 + b]);
// 注意: 第一次搜到!dist.count(state), 和 后面这种情况都要算进来
if (!dist.count(state) || dist[state] > step + 1){
dist[state] = step + 1;
prev[state] = {
source, op[i]};
heap.push({
dist[state] + f(state), state});
}
swap(state[x * 3 + y], state[a * 3 + b]);
}
}
string res;
while (end != start){
res += prev[end].second;
end = prev[end].first;
}
reverse(res.begin(), res.end());
return res;
}
int main(){
string g, c, seq;
while (cin >> c){
g += c; // 初始状态
if (c != "x") seq += c; // 用来计算逆序对的序列, 因为计算逆序对的时候不能带x
}
//计算逆序对
int t = 0;
for (int i = 0; i < seq.size(); i ++ )
for (int j = i + 1; j < seq.size(); j ++ )
if (seq[i] > seq[j])
t ++;
if (t % 2) puts("unsolvable");
else cout << bfs(g) << endl;
return 0;
}
AcWing 178. 第K短路
分析
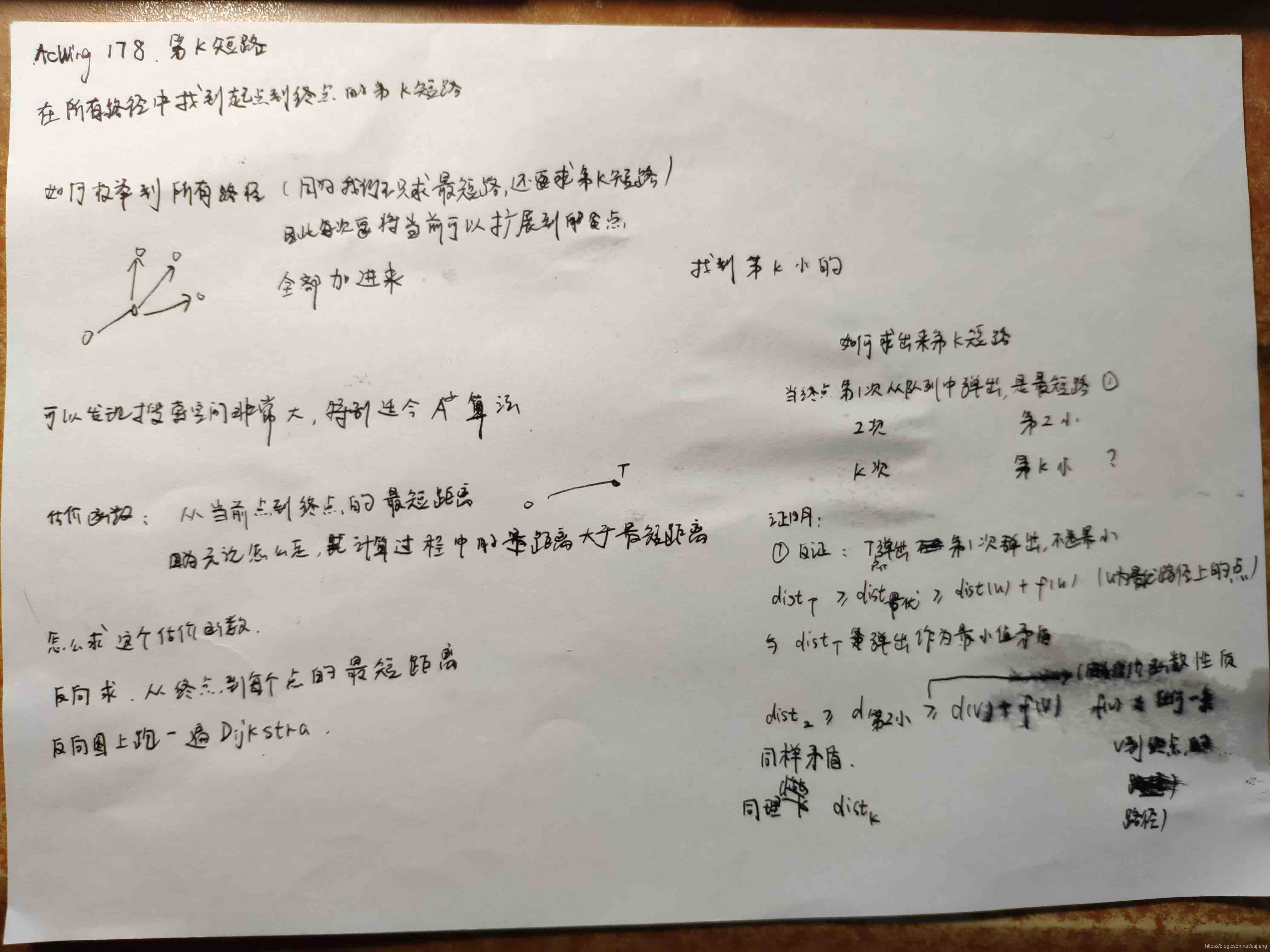
因为是求第K短路,考虑如何枚举到所有路线。 即:将当前能扩展到的点全部加入进来。
在求最短路问题中,是将能更新当前点的距离的点加入进来。
这里是第k短路,不仅仅是求最短路!!!,相当于爆搜了
估价函数的选取
估价函数需要选取<= 真实距离,且比较接近
可以选取从该点到终点的最短距离
因为不管以什么样的路线,从当前点到终点的最短距离 一定 >= 从当前点到终点的距离。
因此f()可以取成每个点到终点的最短距离。
可以从反向图上求得该距离。即在反向图上做一遍dijkstra
如何求得第k短路
代码
#include <iostream>
#include <cstring>
#include <queue>
using namespace std;
typedef pair<int, int> PII;
typedef pair<int, PII> PIII; // Astar算法中队列中需要push这个,
// 1.当前点到起点距离 + 估价函数 2.真实距离 3.当前点的编号
#define x first
#define y second
const int N = 1010, M = 200010;
int n, m, S, T, K;
int h[N], rh[N], e[M], w[M], ne[M], idx;
int dist[N], cnt[N];
bool st[N];
void add(int h[], int a, int b, int c){
e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx ++;
}
void dijkstra(){
// memset(st, 0, sizeof st);
memset(dist, 0x3f, sizeof dist);
dist[T] = 0;
priority_queue<PII, vector<PII>, greater<PII>> heap;
heap.push({
0, T});
while(heap.size()){
auto t = heap.top(); heap.pop();
int ver = t.y;
if (st[ver]) continue;
st[ver] = true;
for (int i = rh[ver]; ~i; i = ne[i]){
int j = e[i];
if (dist[j] > dist[ver] + w[i]){
dist[j] = dist[ver] + w[i];
heap.push({
dist[j], j});
}
}
}
}
int astar(){
priority_queue<PIII, vector<PIII>, greater<PIII>> heap;
heap.push({
dist[S], {
0, S}});
while (heap.size()){
auto t = heap.top(); heap.pop();
int ver = t.y.y, distance = t.y.x;// distance表示起点到当前点的距离, dist[j]表示当前点到终点的距离
cnt[ver] ++;
if (cnt[T] == K) return distance;
for (int i = h[ver]; ~i; i = ne[i]){
int j = e[i];
if (cnt[j] < K)
heap.push({
distance + w[i] + dist[j], {
distance + w[i], j}});
}
}
return -1;
}
int main(){
cin >> n >> m;
memset(h, -1, sizeof h);
memset(rh, -1, sizeof rh);
while (m -- ){
int a, b, c;
scanf("%d%d%d", &a, &b, &c);
add(h, a, b, c), add(rh, b, a, c);
}
scanf("%d%d%d", &S, &T, &K);
if (S == T) K ++;
dijkstra();
printf("%d\n", astar());
return 0;
}
代码中if(cnt[ver] < K)的剪枝
yxc : 对的,这个剪枝在极端情况下可能会有问题,所以这里是对正确性和时间做了下权衡。