连接WiFi

nano修改分辨率


查阅了很多博客,其实可能问题会有相似的,但产生的原因可能各不相同,我的环境是win7+Ubuntu16.04的双系统,装好系统后各项功能是完好的,但是第二天开机的时候就出现了连不上网的问题,尝试了很多方法,开始以为是无线驱动的问题,但又查了一些人的博客通过rfkill list命令查看驱动发现网卡是在的,只不过我发现了问题就是我的一个驱动的hard blocked是yes


根据一片博客中写的我将/etc/Network/里的NetworkManage.conf文件中的“manage=false”改成了“manage=true”
然后重启就好了。
报错信息修改
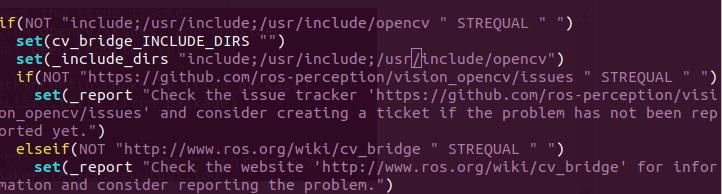
- CMake Error at /opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake:113 (message):
Project ‘cv_bridge’ specifies ‘/usr/include/opencv’ as an include dir,
which is not found. It does neither exist as an absolute directory nor in
‘${ {prefix}}//usr/include/opencv’. Check the issue tracker
‘https://github.com/ros-perception/vision_opencv/issues’ and consider
creating a ticket if the problem has not been reported yet.
Call Stack (most recent call first):
/opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:76 (find_package)
rikirobot_project/riki_line_follower/CMakeLists.txt:7 (find_package)

解决:安装的是opencv4,位置命名成了/usr/include/opencv4
sudo vim /opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake
改掉第96行
或者:::::::
产生这个的原因是:在tx2中我把原来opencv4.1.1版本卸载了,重新安装了opencv3.2
重新安装了cv_bridge,在cv_bridge中找opencv的默认路径不一样,所以要修改。在哪里修改呢?
这里:/opt/ros/melodic/share/cv_bridge/cv_bridgeConfig.cmake
修改哪里呢?
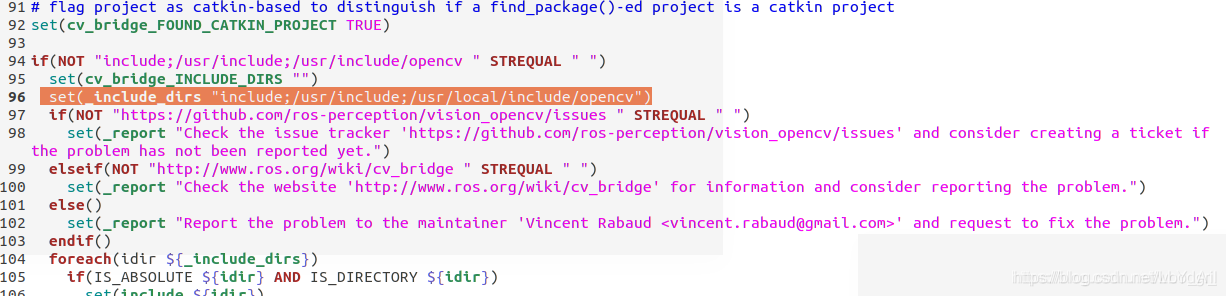
96行
原来是这样子:
PS:原因是:使用sudo apt install ros-melodic-desktop-full安装的ros,那么会默认安装opencv版本到/usr/include,/usr/lib,/usr/share三个目录。但是如果我们从opencv官网源码编译安装的(以最常用的opencv3.2为例)opencv会默认安装到usr/local下对应的三个子目录。
错误qt
qmake: could not exec '/usr/lib/aarch64-linux-gnu/qt4/bin/qmake': No such file or directory
CMake Error at /usr/share/cmake-3.10/Modules/FindQt4.cmake:1320 (message):
Found unsuitable Qt version "" from NOTFOUND, this code requires Qt 4.x
Call Stack (most recent call first):
slam_p/hector_slam/hector_geotiff/CMakeLists.txt:12 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/star/starrobot_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/star/starrobot_ws/build/CMakeFiles/CMakeError.log".
Makefile:6324: recipe for target 'cmake_check_build_system' failed
make: *** [cmake_check_build_system] Error 1
Invoking "make cmake_check_build_system" failed
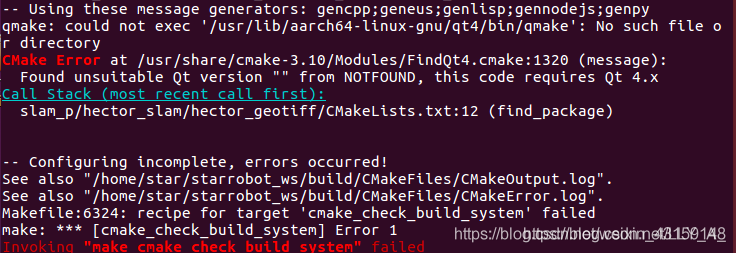
解决:
sudo apt-get install qt4-default
重新编译,即可成功``。
或者:
用QT5编译
```py
catkin_make -DUseQt5=ON -j2
解决PLUGINLIB_DECLARE_CLASS 错误
一、问题描述
在catkin_make时候报错:
二、解决办法:
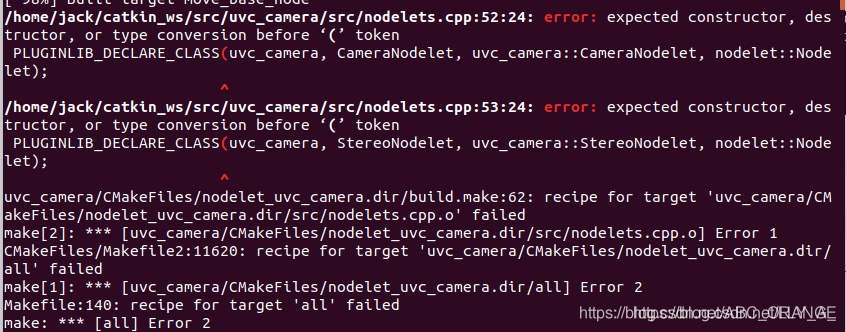
在uvc_camera的源码中/uvc_camera/src/nodelets.cpp 中找到
PLUGINLIB_DECLARE_CLASS(uvc_camera, CameraNodelet, uvc_camera::CameraNodelet, nodelet::Nodelet);
PLUGINLIB_DECLARE_CLASS(uvc_camera, StereoNodelet, uvc_camera::StereoNodelet, nodelet::Nodelet)
把这两行改成:
PLUGINLIB_EXPORT_CLASS(uvc_camera::CameraNodelet , nodelet::Nodelet);
PLUGINLIB_EXPORT_CLASS(uvc_camera::StereoNodelet , nodelet::Nodelet);
参考:
https://blog.csdn.net/lowbob/article/details/108909168
解决PLUGINLIB_DECLARE_CLASS(turtlebot_follower, TurtlebotFollower, turtlebot_follower::TurtlebotFoll错误
硬件:jetson nano ,TI_mmwave IWR1443
进行Autonomous Robotics with ROS for mmWave时错误记录1。
问题描述:在ros工作区catkin_make,出现错误:
/home/jetbot/TI_ws/src/turtlebot/turtlebot_apps/turtlebot_follower/src/follower.cpp:317:24: error: expected constructor, destructor, or type conversion before ‘(’ token
PLUGINLIB_DECLARE_CLASS(turtlebot_follower, TurtlebotFollower, turtlebot_follower::TurtlebotFollower, nodelet::Nodelet);

解决方案:定位到上述文件位置,打开follower.cpp,将
PLUGINLIB_DECLARE_CLASS(turtlebot_follower, TurtlebotFollower, turtlebot_follower::TurtlebotFollower, nodelet::Nodelet);
更改为:
PLUGINLIB_EXPORT_CLASS(TurtlebotFollower , nodelet::Nodelet);
建议不要用:PLUGINLIB_DECLARE_CLASS,以PLUGINLIB_EXPORT_CLASS替换。其中PLUGINLIB_DECLARE_CLASS的参数为4个,而PLUGINLIB_EXPORT_CLASS的参数为两个。
error: expected constructor, destructor, or type conversion before ‘(’ token PLUGINLIB_DECLARE_CLAS
编译错误:
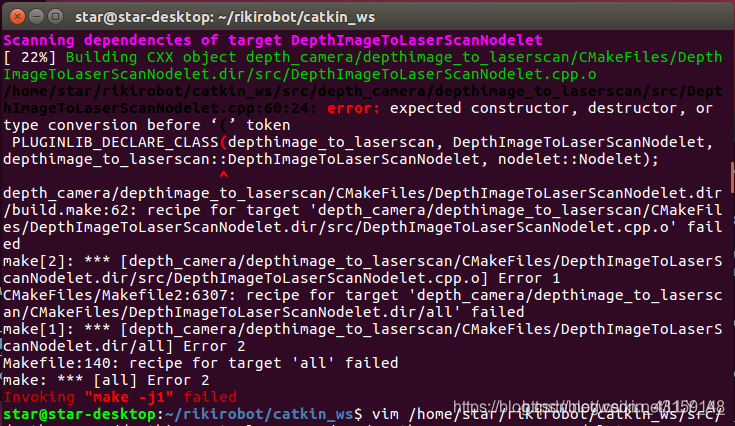
/home/lly/rikirobot/catkin_ws/src/depth_camera/depthimage_to_laserscan/src/DepthImageToLaserScanNodelet.cpp:60:24: error: expected constructor, destructor, or type conversion before ‘(’ token
PLUGINLIB_DECLARE_CLASS(depthimage_to_laserscan, DepthImageToLaserScanNodelet, depthimage_to_laserscan::DepthImageToLaserScanNodelet, nodelet::Nodelet);
^
depth_camera/depthimage_to_laserscan/CMakeFiles/DepthImageToLaserScanNodelet.dir/build.make:62: recipe for target ‘depth_camera/depthimage_to_laserscan/CMakeFiles/DepthImageToLaserScanNodelet.dir/src/DepthImageToLaserScanNodelet.cpp.o’ failed
make[2]: *** [depth_camera/depthimage_to_laserscan/CMakeFiles/DepthImageToLaserScanNodelet.dir/src/DepthImageToLaserScanNodelet.cpp.o] Error 1
CMakeFiles/Makefile2:6307: recipe for target ‘depth_camera/depthimage_to_laserscan/CMakeFiles/DepthImageToLaserScanNodelet.dir/all’ failed
make[1]: *** [depth_camera/depthimage_to_laserscan/CMakeFiles/DepthImageToLaserScanNodelet.dir/all] Error 2
Makefile:140: recipe for target ‘all’ failed
make: *** [all] Error 2
Invoking “make -j1” failed
出现错误的原因是ubuntu18.04 ros melodic版本与ubuntu16.04 ros kinetic版本中,pluginlib库函数发生了变化。
解决方法:
未修改前的代码:

修改为:
PLUGINLIB_EXPORT_CLASS(depthimage_to_laserscan::DepthImageToLaserScanNodelet, nodelet::Nodelet)
再次编译,即可成功
/home/nano/catkin_ws/src/rikirobot_project/riki_line_follower/src/linedetect.cpp:101:5: error: ‘CV_FONT_HERSHEY_COMPLEX’ was not declared in this scope CV_FONT_HERSHEY_COMPLEX, 1, CV_RGB(255, 0, 0));
解决方法:
简单的,就是直接包含 opencv2/opencv.hpp,如果麻烦一点,就是只添加这个模块的头文件 opencv2/imgproc.hpp
cvPutText的头文件是 opencv2/imgproc/imgproc_c.h
加上#include <opencv2/opencv.hpp> 和using namespace cv;
opencv4中一般取消了cv前缀;应该用FONT_HERSHEY_COMPLEX_SMALL
ros_astra_camera出现问题
https://github.com/alspitz/ros_astra_camera
出现error: RPC failed; curl 18 transfer closed with outstanding read data remain问题
error: RPC failed; curl 18 transfer closed with outstanding read data remaining
fatal: The remote end hung up unexpectedly
fatal: early EOF
fatal: index-pack failed
究其原因是因为curl的postBuffer的默认值太小,我们需要调整它的大小,在终端重新配置大小
在这里,笔者把postBuffer的值配置成500M,对笔者来说已经够了。可以根据你需要下载的文件大小,将postBuffer值配置成合适的大小。
git config --global http.postBuffer 524288000
这样已经配置好了,如果你不确定,可以根据以下命令查看postBuffer。
git config --list
