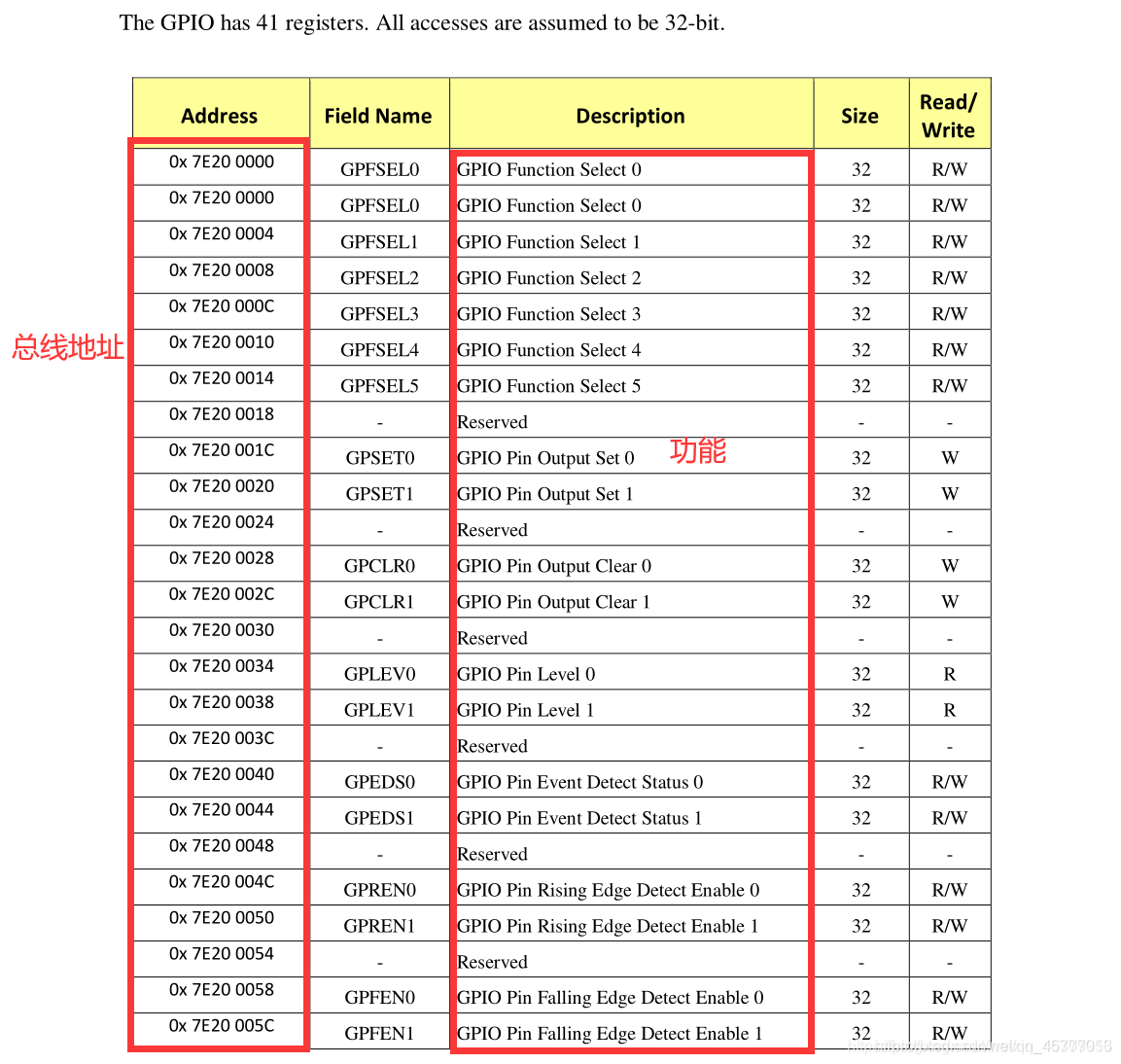
树莓派有GPIO有41个寄存器,都是用来管理GPIO的。每个寄存器都是32位。
树莓派有54个引脚,即I/O口,分别有6个寄存器来管理功能,
GPFEL0 管理0~9引脚的输入/输出的功能 ------ GPFEL1管理 10~19引脚的输入/输出的功能 以此类推
1.树莓派寄存器的介绍
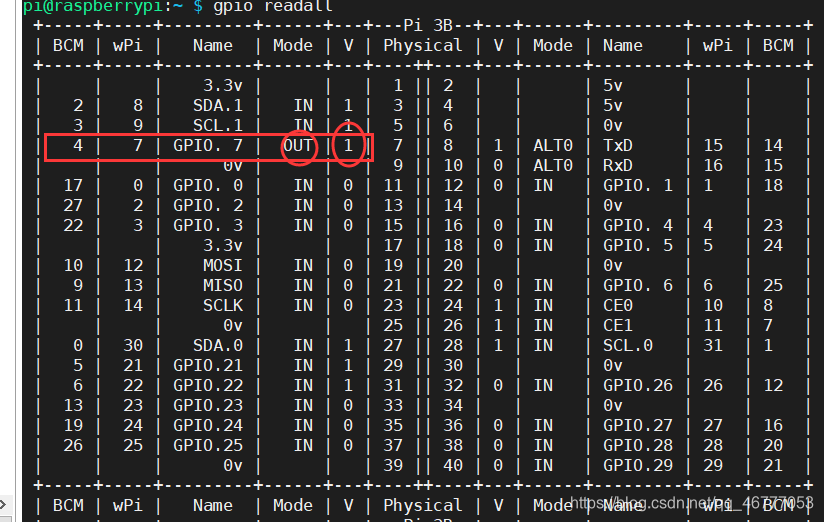
2.对引脚4进行配置
对引脚4的寄存器(即GPFSEL0寄存器)进行配置
GPFSEL0 GPIO Function Select 0: 功能选择 输入/输出
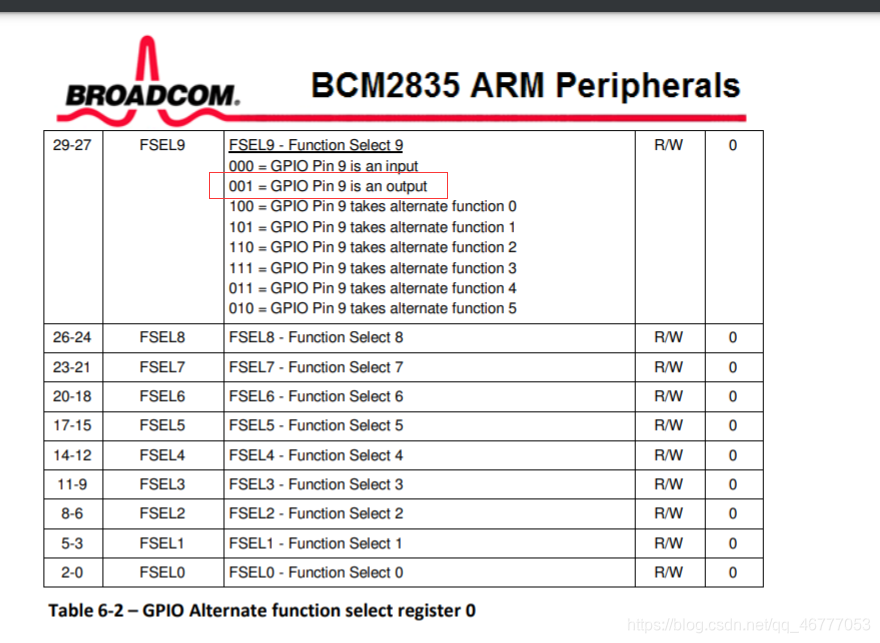
根据红框框可知,要将引脚4 配置为输出引脚,需要将14~12位配为001
可达成 GPIO Pin 4 is an output
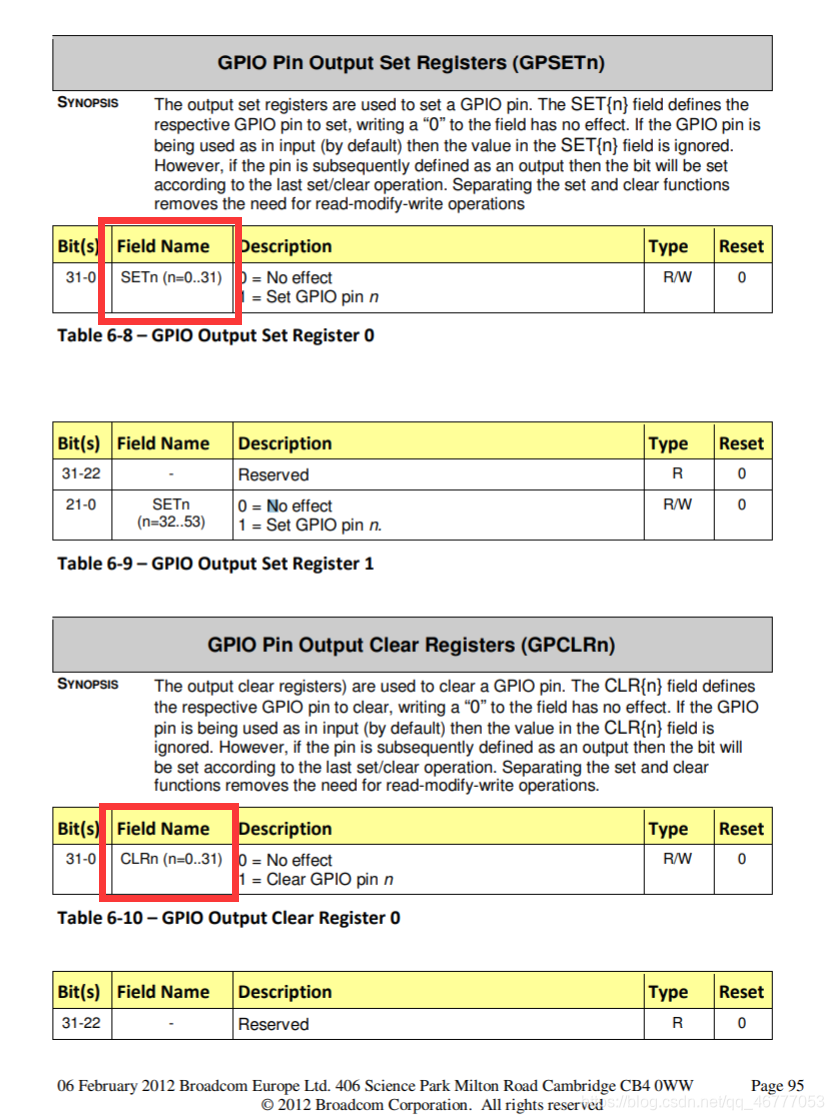
设置pin4 为1 和清零,需要对寄存器GPSET0和寄存器GPCLR0配置具体方法查看芯片手册P95
3.寄存器的地址问题

io空间的起始地址是0x3f000000,加上GPIO的偏移量0x2000000 ,通过程序员计算器计算可得GPIO的物理地址应该是从0x3f200000开始的,然后在这个基础上进行Linux系统的MMU内存虚拟化管理,映射到虚拟地址上。
该图的尾部偏移是对的,根据GPIO的物理地址0x3f200000可以知道:
GPFSEL0 的物理地址是0x3f200000
GPSET0 的物理地址是0x3f20001c
GPCLR0 的物理地址是 0x3f200028
Linux环境中,是要对虚拟地址进行操作的,而不是物理地址,通过函数转换
void __iomem * __ioremap(unsigned long phys_addr, size_t size, unsigned long flags);
ioremap宏定义在asm/io.h内:
#define ioremap(cookie,size) __ioremap(cookie,size,0)
参数:
phys_addr:要映射的起始的IO地址
size:要映射的空间的大小
flags:要映射的IO空间和权限有关的标志
该函数返回映射后的内核虚拟地址(3G-4G). 接着便可以通过读写该返回的内核虚拟地址去访问之这段I/O内存资源。
具体实施代码:
GPFEL0 = volatile(unsigned int *)ioremap(0x3f200000,4); //作用是将物理地址转换成虚拟地址,映射大小设置为4,io口寄存器映射成普通内存单元进行访问
GPSET0 = volatile(unsigned int *)ioremap(0x3f20001C,4); //GPSET0查看芯片手册可得
GPCLR0 = volatile(unsigned int *)ioremap(0x3f200028,4);
4.底层驱动代码
#include <linux/fs.h> //file_operation声明
#include <linux/module.h> //module_init module_exit声明
#include <linux/init.h> //__init__exit 宏定义声明
#include <linux/device.h> //class device声明
#include <linux/uaccess.h> //copy_from_user的头文件
#include <linux/ctype.h> //设备号dev_t 类型声明
#include <asm/io.h> //ioremap iounmap 的头文件
static struct class *pin4_class;
static struct device *pin4_class_dev;
static dev_t devno; //设备号
static int major = 231; //主设备号
static int minor = 0; //次设备号
static char *module_name = "pin4"; //模块名
volatile unsigned int* GPFSEL0 = NULL; //寄存器变量,不希望寄存器优化它,加上volatile,是个地址加上unsigned
volatile unsigned int* GPSET0 = NULL; //volatile指令不会因编译器的优化而省略,且要求每次直接读值
volatile unsigned int* GPCLR0 = NULL;
static ssize_t pin4_read(struct file *file, char __user *buf, size_t count, loff_t *ppos)
{
printk("pin4_read\n");
return 0;
}
static int pin4_open(struct inode *inode,struct file *file)
{
printk("pin4_open\n");
//配置pin4引脚为输出引脚
*GPFSEL0 &= ~(0x6 << 12);
*GPFSEL0 |= (0x1 << 12);
return 0;
}
static ssize_t pin4_wirite(struct file *file, const char __user *buf,size_t count,loff_t *ppos)
{
int userCmd;
printk("pin4_wirite\n");
//获取上层write函数的值
copy_from_user(&userCmd,buf,count);
//根据值来操作io口,高电平,或者低电平
if(userCmd == 1){
printk("set 1\n");
*GPSET0 |= 0x1 << 4;
}else if(userCmd == 0){
printk("set 0\n");
*GPCLR0 |= 0x1 << 4;
}else{
printk("undo\n");
}
return 0;
}
static struct file_operations pin4_fops = {
.owner = THIS_MODULE,
.open = pin4_open,
.write = pin4_wirite,
.read = pin4_read
};
int __init pin4_drv_init(void) //真实驱动入口
{
int ret;
printk("insmod driver pin4 success\n");
devno = MKDEV(major,minor); //创建设备号
ret = register_chrdev(major,module_name,&pin4_fops); //注册驱动 告诉内核,把这个驱动加入到内核的链表中 注意第一个参数,有点疑惑为啥不是 devno,需要注意!!!
pin4_class = class_create(THIS_MODULE,"myfirstdemo"); //让代码在dev自动生成设备 创建一个类 华手机
pin4_class_dev = device_create(pin4_class,NULL,devno,NULL,module_name); //创建设备文件 类下面创建一个设备 的mate20
GPFSEL0 = (volatile unsigned int *)ioremap(0x3f200000,4); //作用是将物理地址转换成虚拟地址,映射大小设置为4,io口寄存器映射成普通内存单元进行访问
GPSET0 = (volatile unsigned int *)ioremap(0x3f20001C,4);
GPCLR0 = (volatile unsigned int *)ioremap(0x3f200028,4);
return 0;
}
void __exit pin4_drv_exit(void)
{
iounmap(GPFSEL0); //寄存器卸载
iounmap(GPSET0);
iounmap(GPCLR0);
device_destroy(pin4_class,devno); //先卸载设备号(主设备号和次设备号) 即mate20
class_destroy(pin4_class); //再卸载类 即华手机
unregister_chrdev(major,module_name); //内核链表中的节点,成功卸载驱动 //需要注意第一个参数是主设备号
}
module_init(pin4_drv_init); //入口,内核加载该驱动的时候,这个宏会被调用
module_exit(pin4_drv_exit);
MODULE_LICENSE("GPL v2");
5.应用层代码
#include<stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
int main(){
int fd;
int cmd;
fd = open("/dev/pin4",O_RDWR);
if(fd<0){
printf("open pin4 fail\n");
exit(-1);
}else{
printf("open pin4 success\n");
}
printf("Plese input: \n");
scanf("%d",&cmd);
printf("cmd=%d\n",cmd);
if(cmd == 1){
printf("set 1\n");
write(fd,&cmd,1);
}else if(cmd == 0){
printf("set 0\n");
write(fd,&cmd,1);
}
return 0;
}
~
编译底层驱动代码的步骤查看
https://blog.csdn.net/qq_46777053/article/details/113062459
装载成功后
运行应用层可执行文件输入1,引脚为输出引脚且高电平,输入0,引脚则输出低电平
可得结果