一、安装夹具
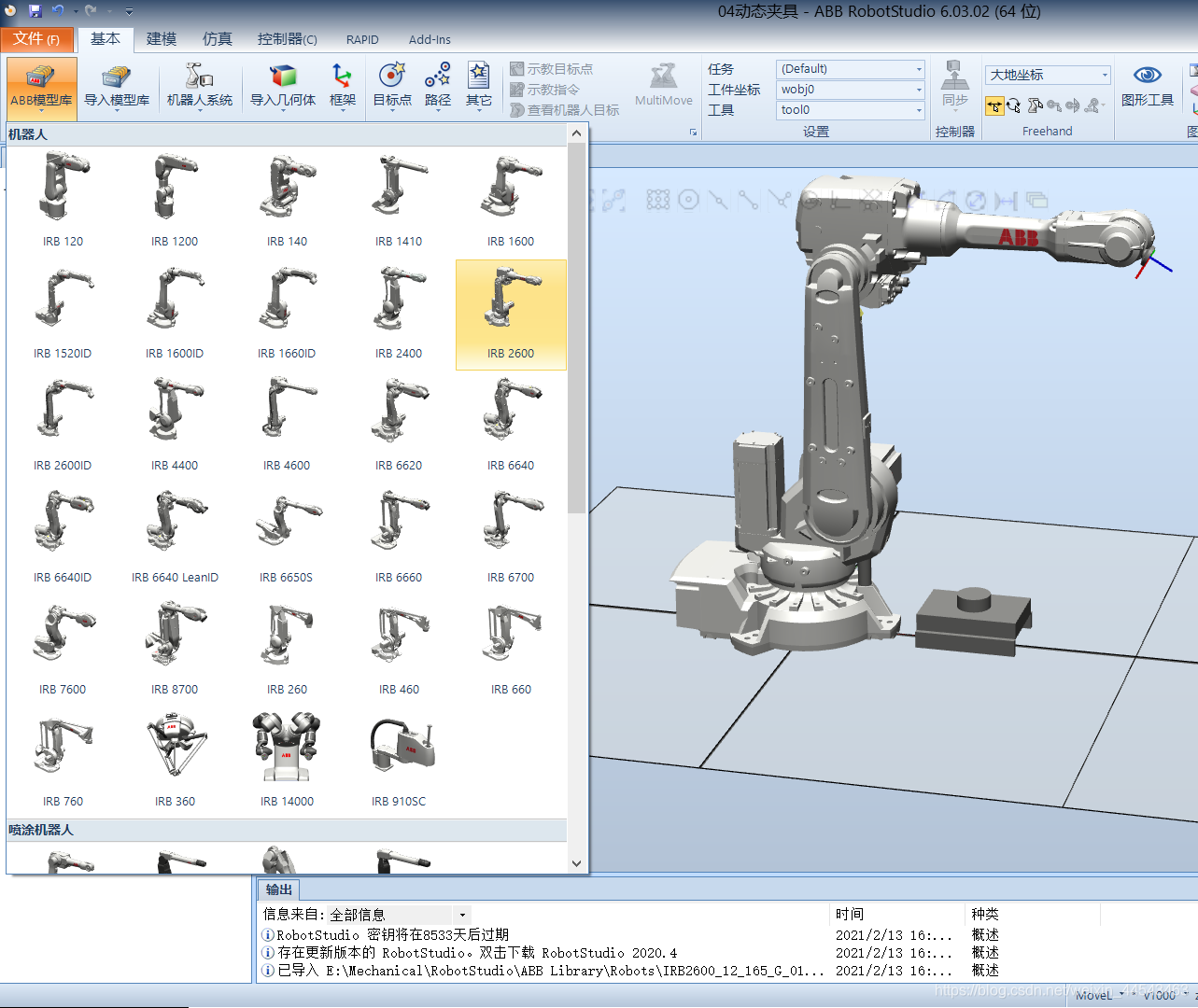
- 导入一个IRB2600机器人
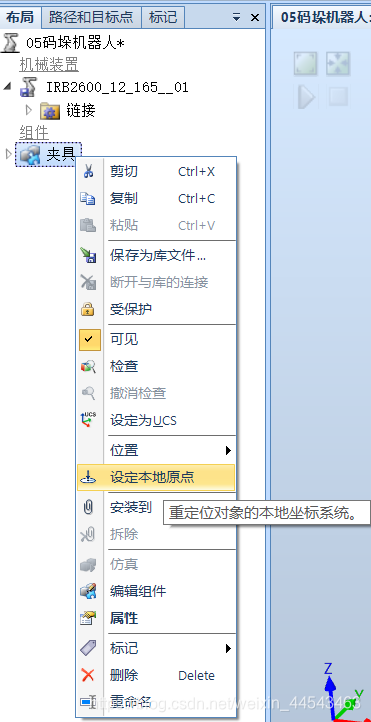
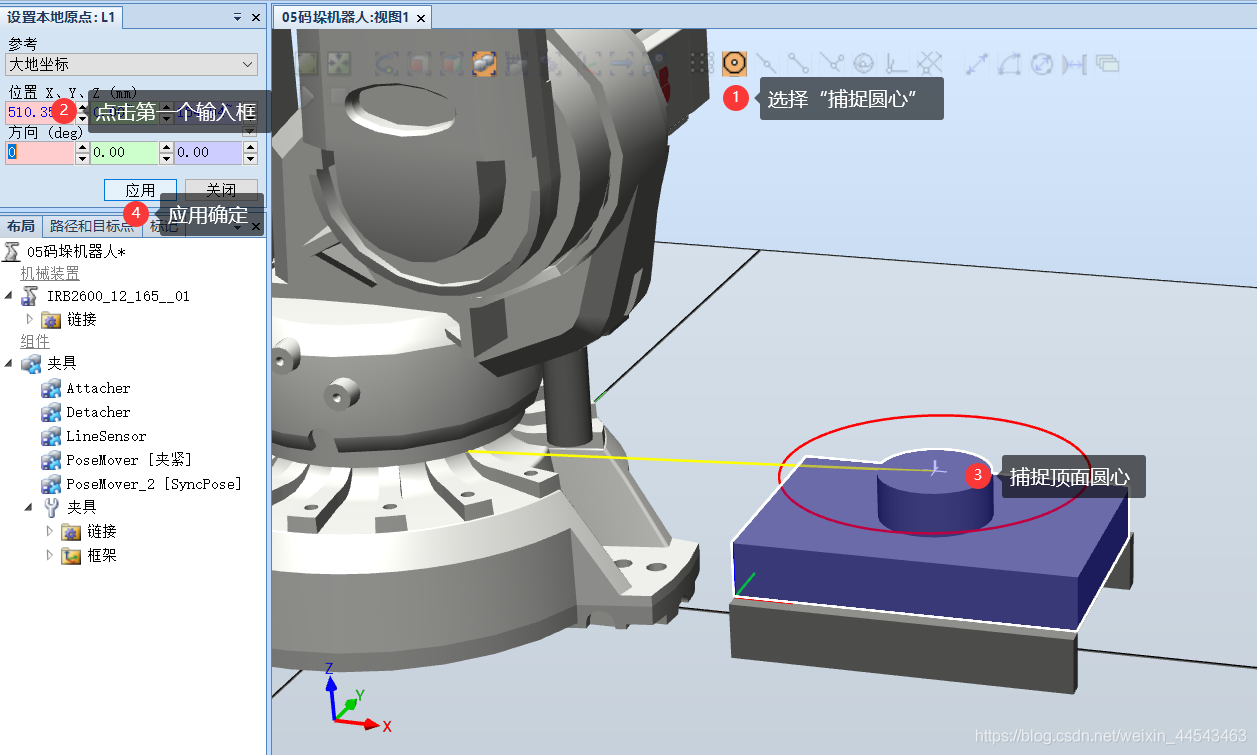
- 移动夹具的本地坐标原点,使原点位置为顶面中心(与法兰盘连接的部位)
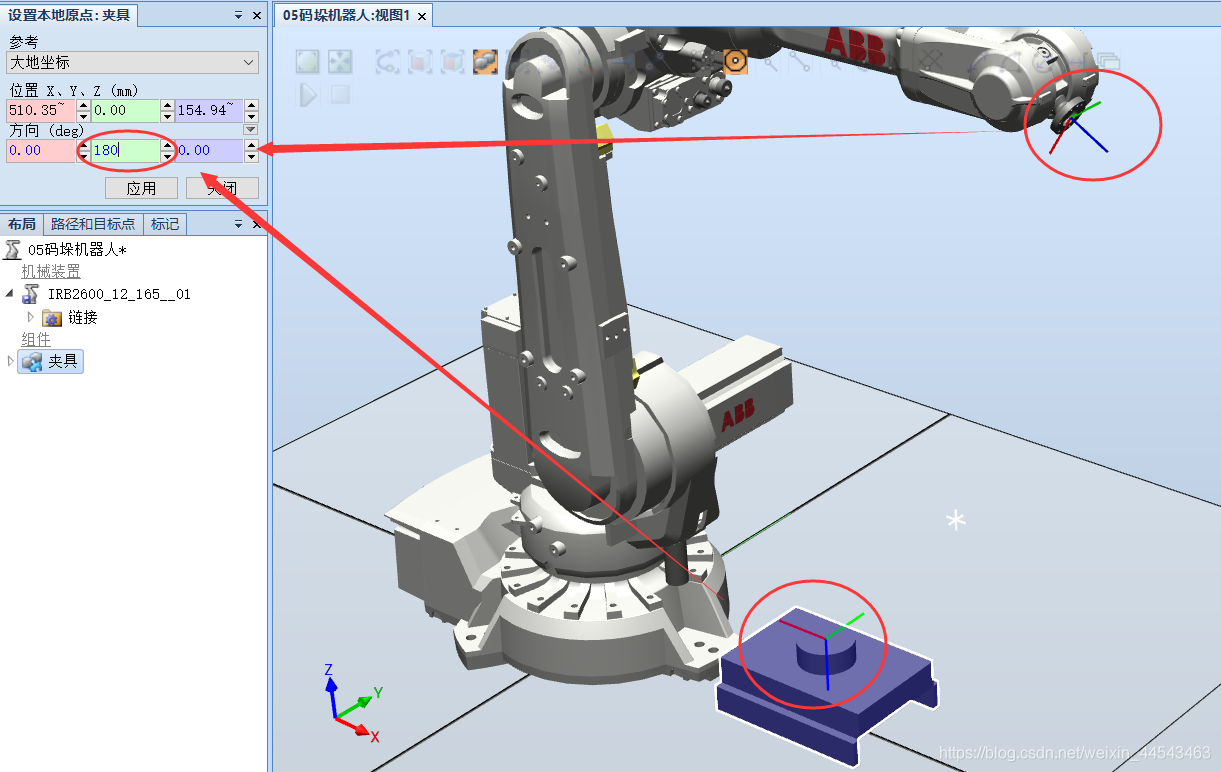
- 对齐夹爪Smart组件的本地坐标和机器人末端法兰盘的坐标,使夹具的本地坐标与法兰盘的本地坐标重合,为下一步安装夹具做准备。
- 在布局菜单内,将夹具拖动到IRB2600机器人上,完成夹具的安装
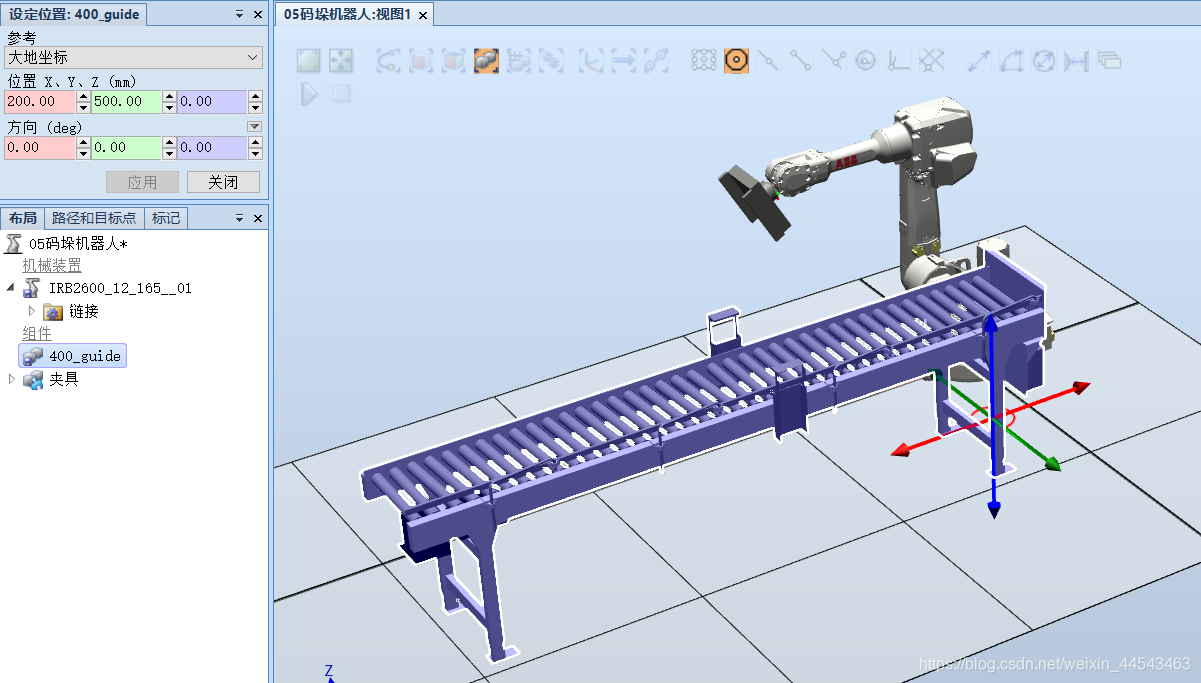
二、创建传送带
- 导入传送带并设定传送带的位置
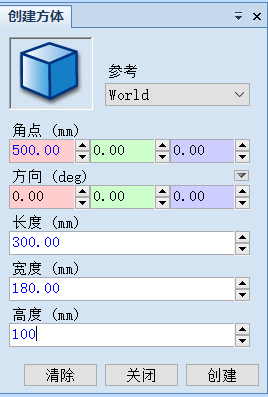
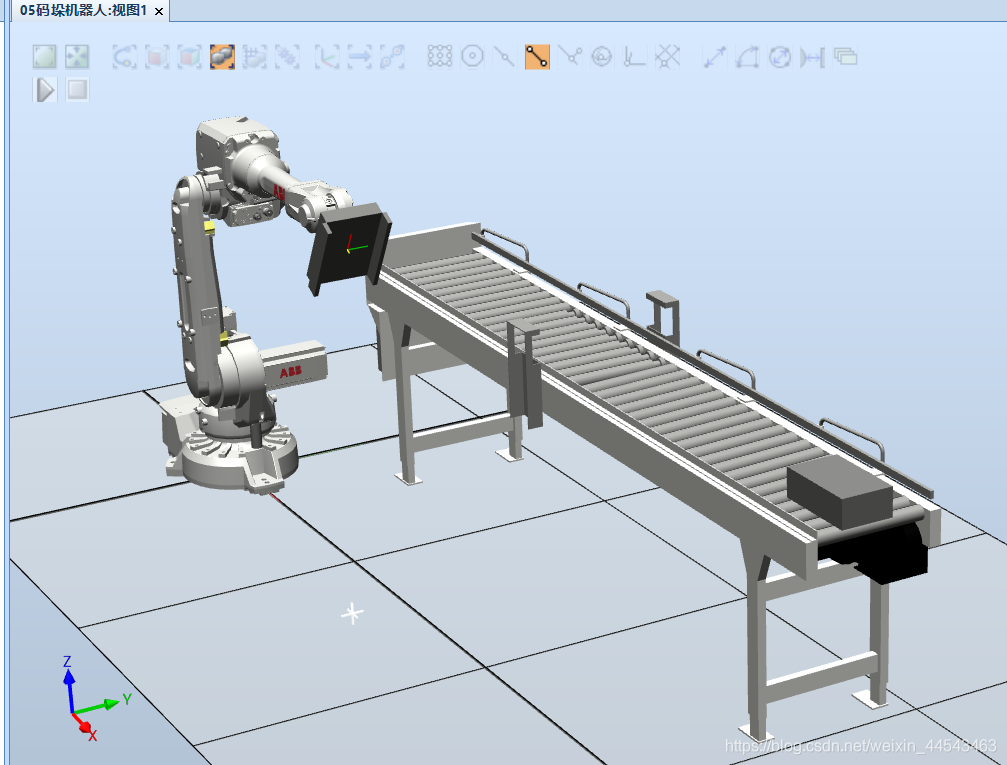
- 创建码垛用的物体,并将其移动到传送带的起点。
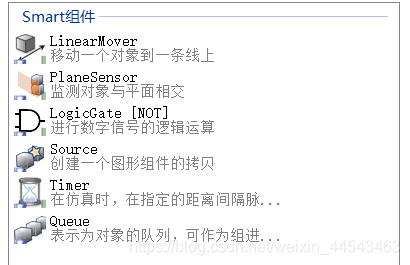
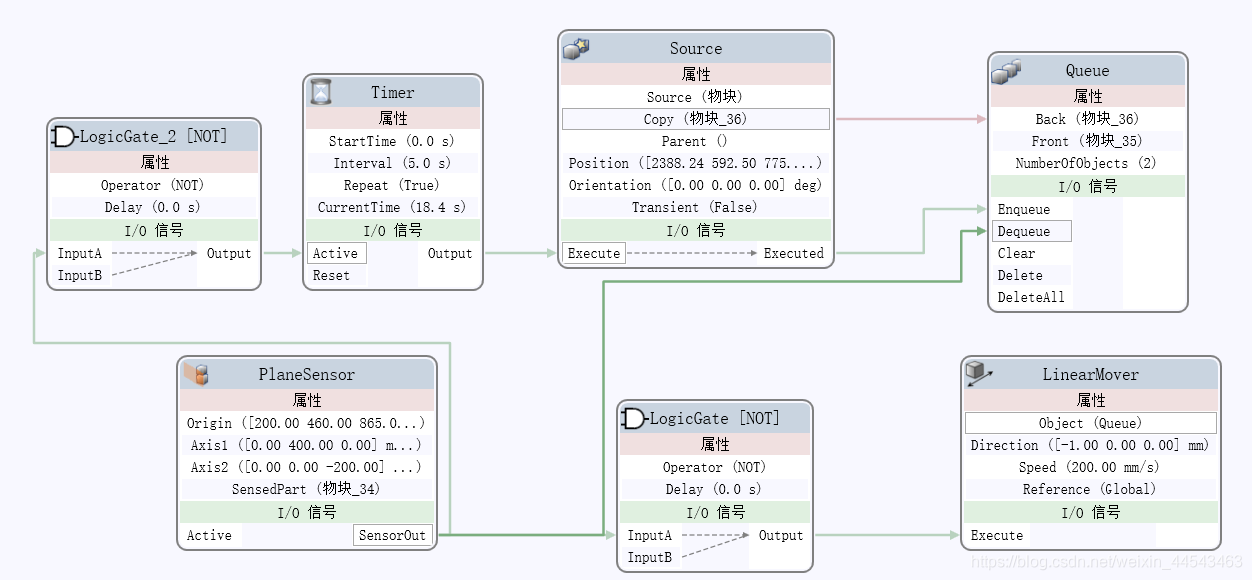
- 创建一个Smart组件,用于传送带物体的运动。添加如下组件
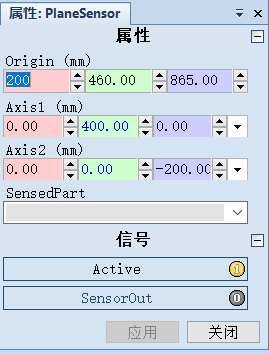
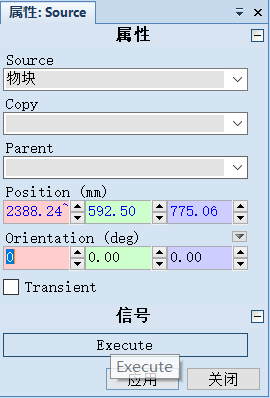
- 对各个组件进行设置


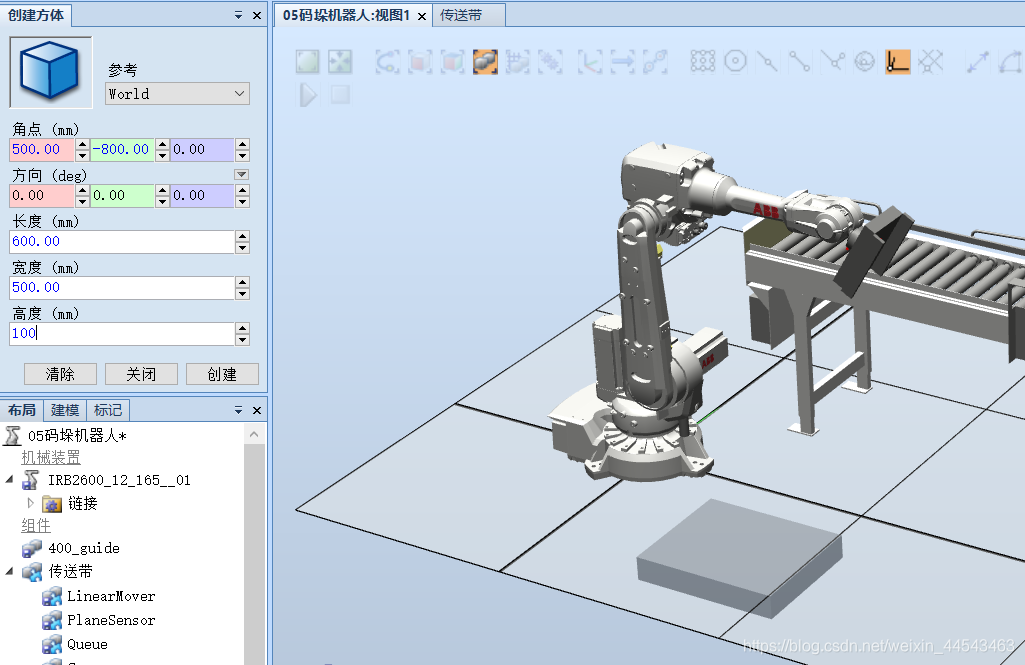
三、创建码垛底盘
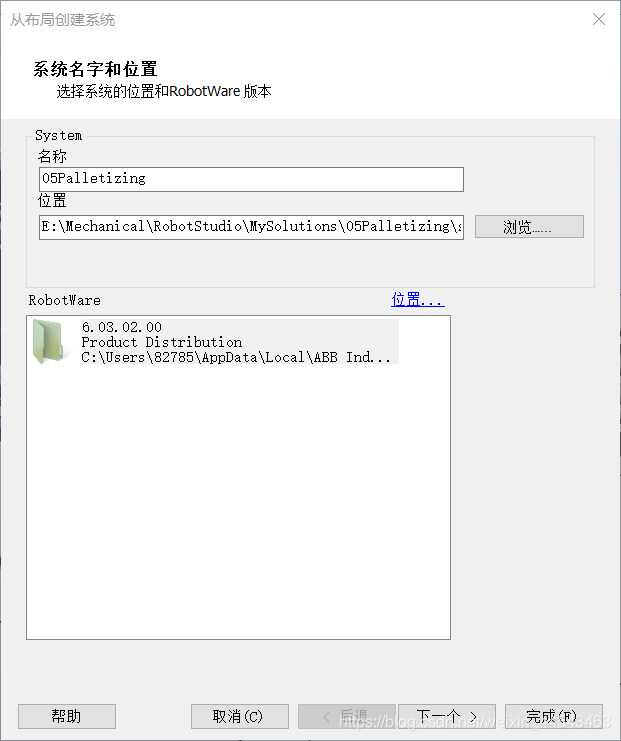
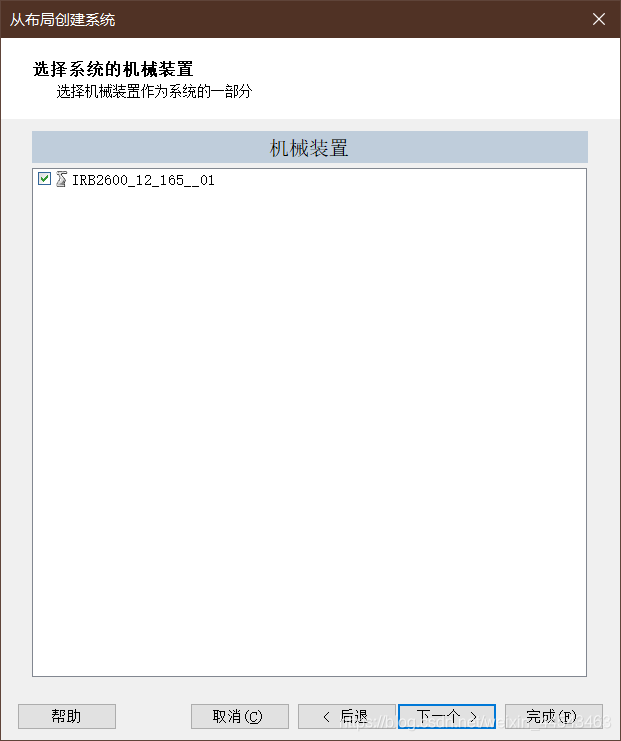
四、创建机器人系统
选项内选择如下选项
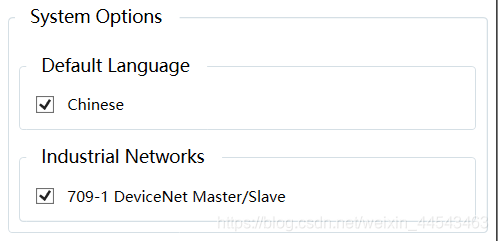
?
-
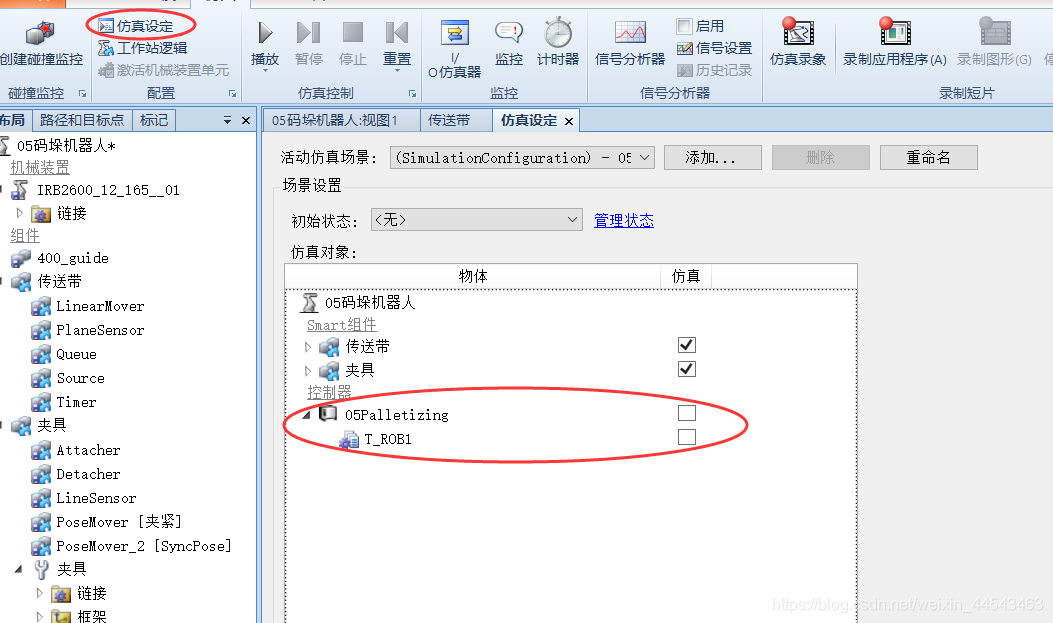
在仿真设定中,将机器人系统后面的框选去除。
-
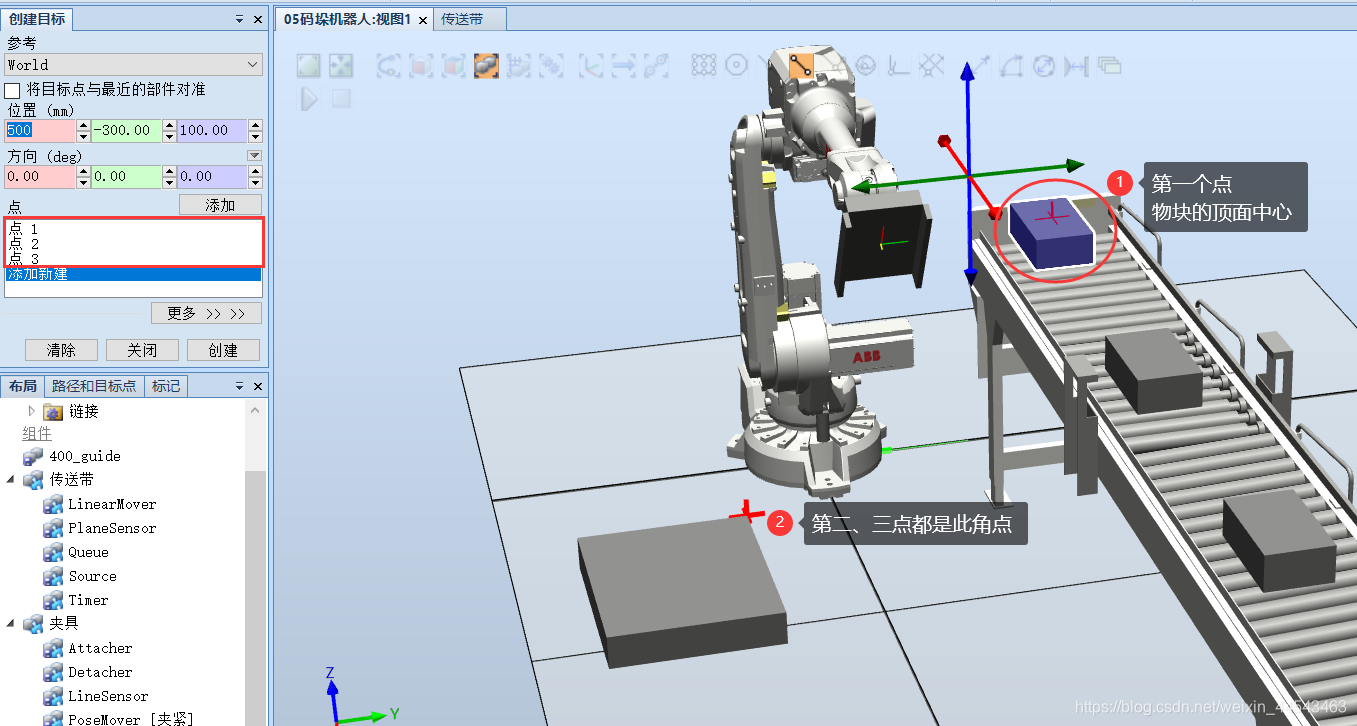
运行仿真,使物块到达面传感器处,然后停止仿真,捕捉几个目标点。(后面两个目标点是为了码垛时,物块会有两种拜访姿态,所以使用两个目标点)
-
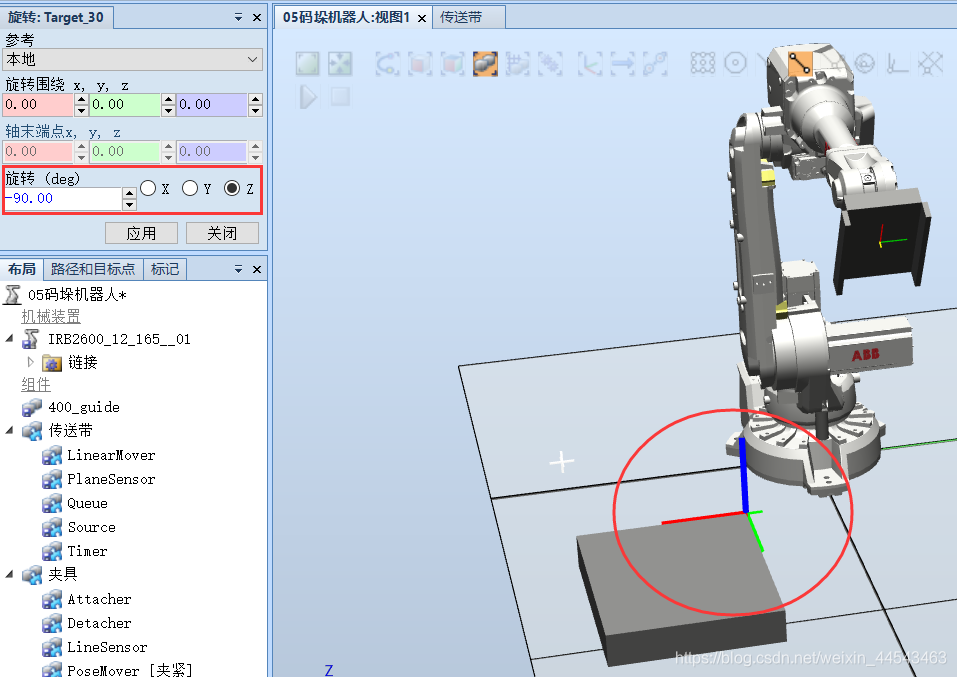
旋转第三个目标点,使其绕Z轴旋转-90度。
-
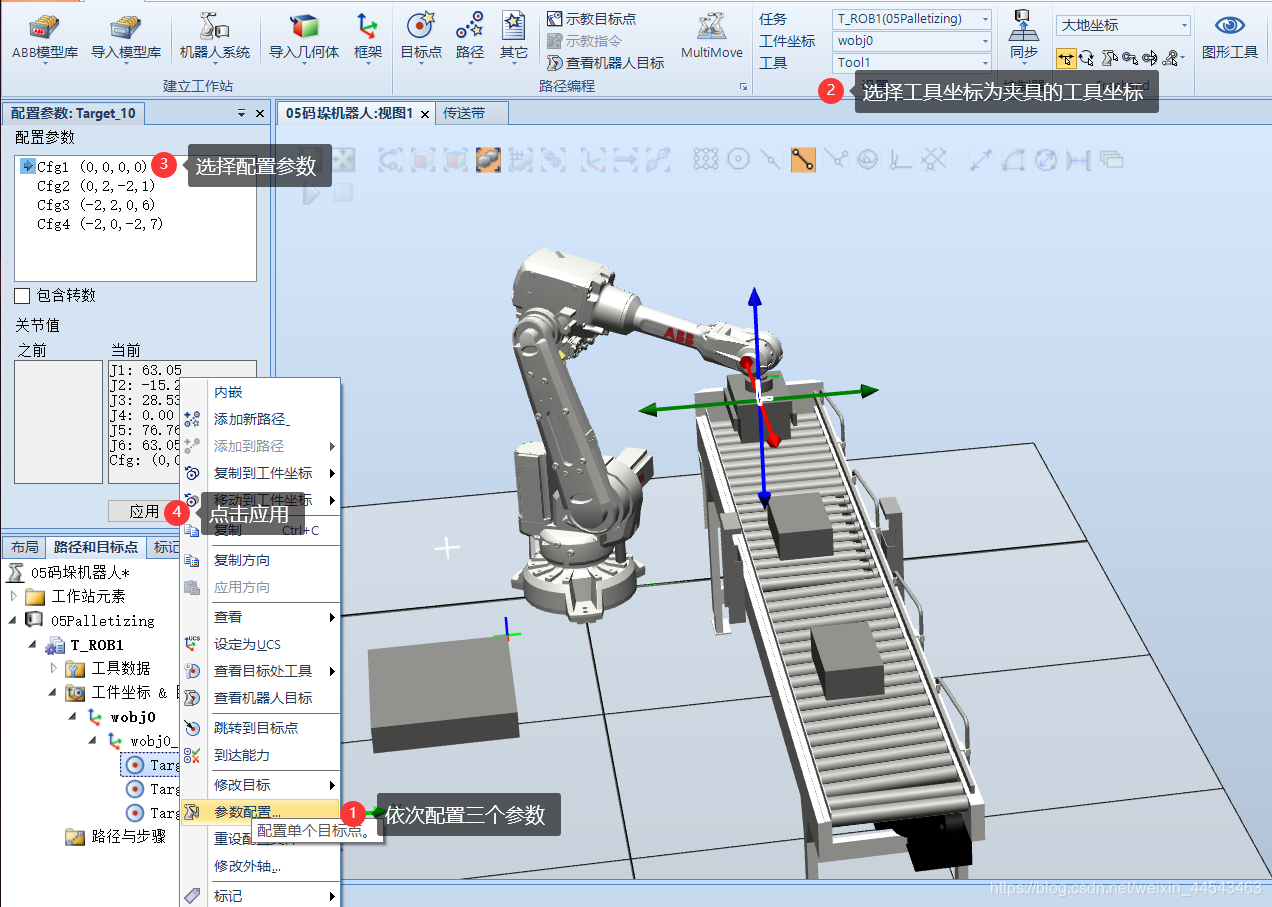
为目标点配置参数
-
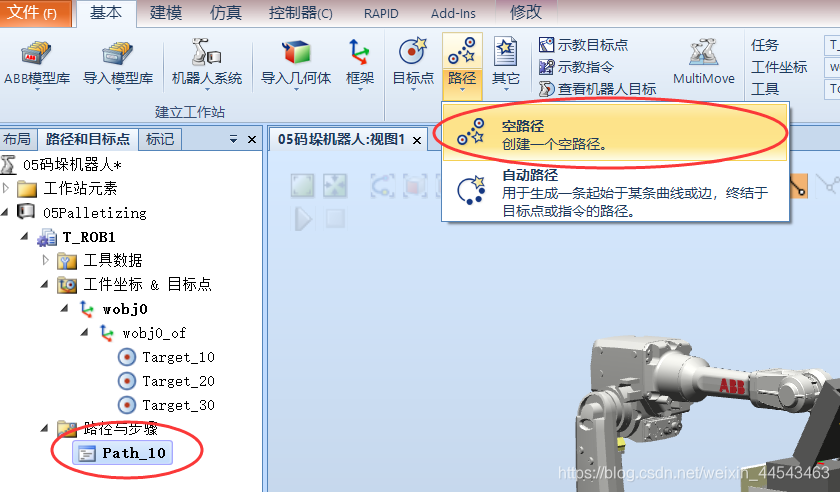
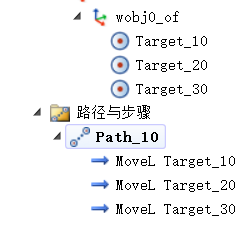
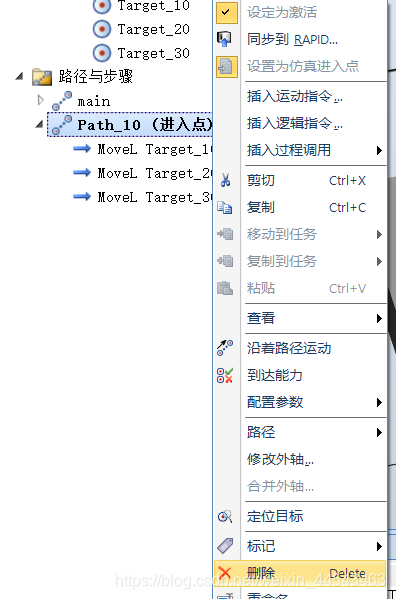
使机器人回到机械原点,然后创建一个空路径,将三个目标点依次拖动到路径中。
-
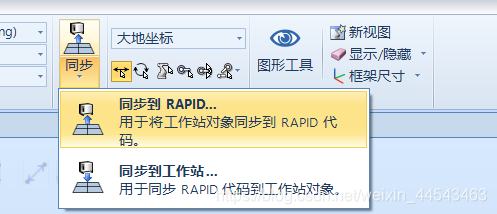
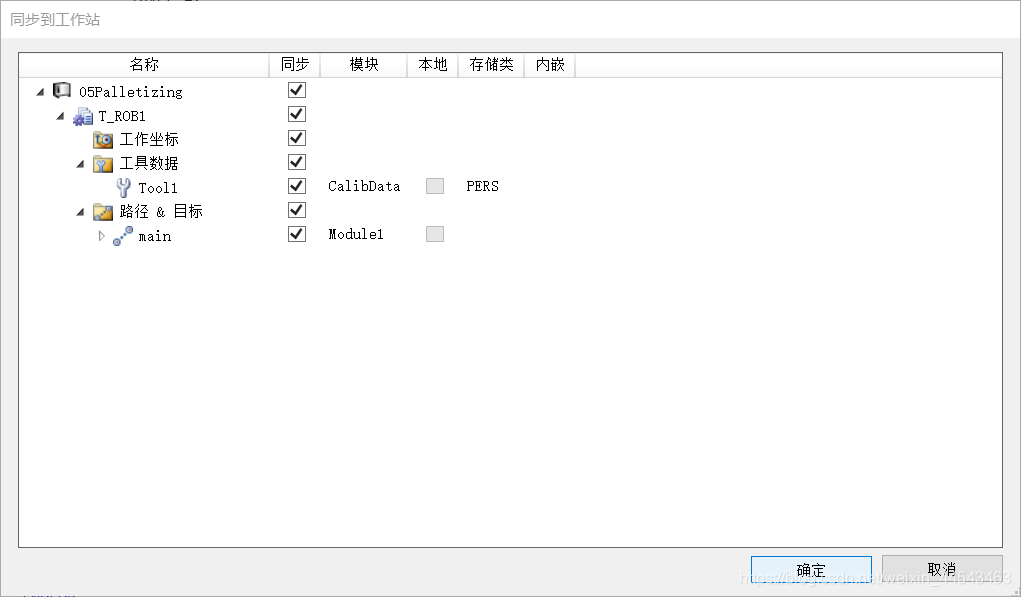
同步到工作站

-
删除之前仿真出来的物块的copy物体。
-
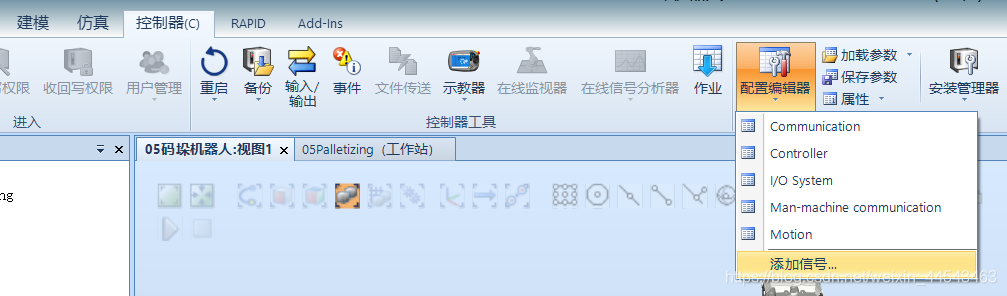
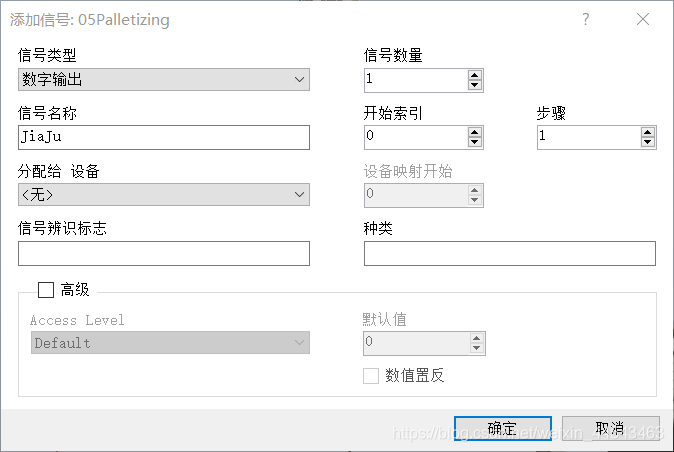
添加两个信号,一个是到位信号,用于传送带的等待,另一个是夹具信号。添加完成后重启控制器。

-
打开控制器,可以看到RAPID/T_ROB1下的程序模块,接下来就可以进行程序编写了。
程序编写
main程序代码如下
MODULE Module1
CONST robtarget Target_10:=[[347.037,682.5,875.06],[1,0,0,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
CONST robtarget Target_20:=[[500,-300,100],[1,0,0,0],[-1,0,-1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
CONST robtarget Target_30:=[[500,-300,100],[0,0,0,1],[-1,0,1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
VAR num layer:=1;
VAR num x:=0;
VAR num z:=0;
PROC main()
FOR i FROM 0 TO 20 DO
SetDO JiaJu0,0;
MoveJ Offs(Target_10,0,0,200),v500,fine,Tool1;
WaitDI DaoWei0,1;
MoveL Offs(Target_10,0,0,0),v500,fine,Tool1;
SetDO JiaJu0,1;
WaitTime 1;
MoveL Offs(Target_10,0,0,200),v500,fine,Tool1;
IF layer MOD 2 = 1 THEN
IF i MOD 5 < 4 and i MOD 5 <> 0 THEN
MoveL Offs(Target_30,90+x,-150,300+z),v500,fine,Tool1;
MoveL Offs(Target_30,90+x,-150,100+z),v500,fine,Tool1;
SetDO JiaJu0,0;
WaitTime 1;
MoveL Offs(Target_30,90+x,-150,300+z),v500,fine,Tool1;
x:=x+210;
IF i MOD 5 = 3 THEN
x:=0;
ENDIF
ELSE
MoveL Offs(Target_20,150+x,-410,300+z),v500,fine,Tool1;
MoveL Offs(Target_20,150+x,-410,100+z),v500,fine,Tool1;
SetDO JiaJu0,0;
WaitTime 1;
MoveL Offs(Target_20,150+x,-410,300+z),v500,fine,Tool1;
x:=x+300;
ENDIF
IF i MOD 5 = 0 THEN
layer:=2;
x:=0;
z:=z+100;
ENDIF
ELSE
IF i MOD 5 < 3 THEN
MoveL Offs(Target_20,150+x,-100,300+z),v500,fine,Tool1;
MoveL Offs(Target_20,150+x,-100,100+z),v500,fine,Tool1;
SetDO JiaJu0,0;
WaitTime 1;
MoveL Offs(Target_20,150+x,-100,300+z),v500,fine,Tool1;
x:=x+300;
IF i MOD 5 = 2 THEN
x:=0;
ENDIF
ELSE
MoveL Offs(Target_30,100+x,-350,300+z),v500,fine,Tool1;
MoveL Offs(Target_30,100+x,-350,100+z),v500,fine,Tool1;
SetDO JiaJu0,0;
WaitTime 1;
MoveL Offs(Target_30,100+x,-350,300+z),v500,fine,Tool1;
x:=x+210;
ENDIF
IF i MOD 5 = 0 THEN
layer:=1;
x:=0;
z:=z+100;
ENDIF
ENDIF
ENDFOR
z:=0;
ENDPROC
ENDMODULE
仿真测试
- 将代码同步到工作站
- 删除Path_10路径,只保留main路径
- 设置工作站逻辑

- 进行仿真