动态面板理论
动态面板是啥呢?没有太神秘,只要面板模型的解释变量包含了被解释变量的滞后值就是动态面板。
当前的行为取决于前期的行为,举个例子,通俗说:你今天减肥的原因是因为你昨天吃的太多。
动态面板会导致估计不一致:
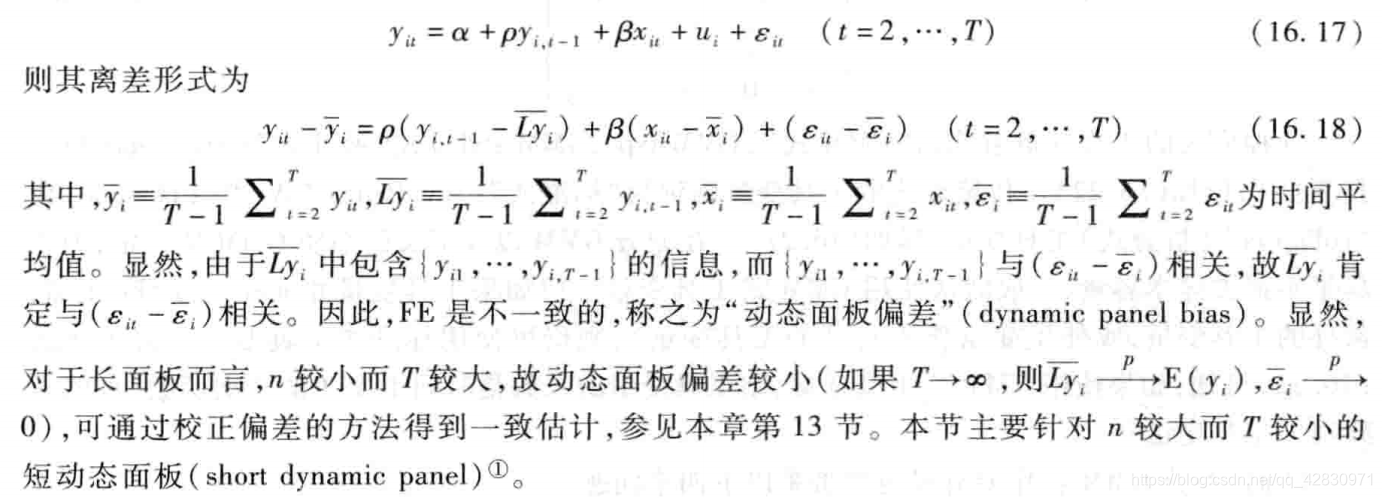
例如:固定效应模型
截图
差分GMM
考虑以下方程:
y i t = α + ρ y i , t − 1 + x i , t ′ β + z i ′ δ + u i + ε i , t ; ( t = 2 , 3 , 4... , T ) y_{it}=\alpha + \rho y_{i,t-1}+x'_{i,t}\beta +z_i'\delta+u_i+\varepsilon_{i,t};(t = 2,3,4...,T) yit=α+ρyi,t−1+xi,t′β+zi′δ+ui+εi,t;(t=2,3,4...,T)
做一阶差分以消除个体效应 u i u_i ui
Δ y i , t = ρ Δ y i , t − 1 + Δ x i , t ′ β + Δ ε i , t ; ( t = 2 , 3 , 4 , 5... , T ) \Delta y_{i,t} = \rho \Delta y_{i,t-1} + \Delta x'_{i,t} \beta+\Delta \varepsilon_{i,t};(t = 2,3,4,5...,T) Δyi,t=ρΔyi,t−1+Δxi,t′β+Δεi,t;(t=2,3,4,5...,T)
其中 Δ y i , t − 1 与 Δ ε i , t \Delta y_{i,t-1}与\Delta \varepsilon_{i,t} Δyi,t−1与Δεi,t依旧相关,因为 y i , t − 1 与 ε i , t − 1 相 关 y_{i,t-1} 与\varepsilon_{i,t-1}相关 yi,t−1与εi,t−1相关
因此 Δ y i , t − 1 \Delta y_{i,t-1} Δyi,t−1是内生变量,需要寻找工具变量进行处理。
Anderson-Hsiao估计量
- 前提条件
ε i , t 不 存 在 自 相 关 \varepsilon_{i,t}不存在自相关 εi,t不存在自相关
使用 y i , t − 2 作 为 Δ y i , t − 1 的 工 具 变 量 y_{i,t-2}作为 \Delta y_{i,t-1}的工具变量 yi,t−2作为Δyi,t−1的工具变量理由如下:
y i , t − 2 与 Δ y i , t − 1 相 关 , y i , t − 2 与 Δ ε i , t 不 相 关 , 因 为 ε i , t 不 存 在 自 相 关 y_{i,t-2}与 \Delta y_{i,t-1}相关,y_{i,t-2}与\Delta \varepsilon_{i,t}不相关,因为\varepsilon_{i,t}不存在自相关 yi,t−2与Δyi,t−1相关,yi,t−2与Δεi,t不相关,因为εi,t不存在自相关
相同的逻辑有了Anderson-Bond估计量,也称为差分GMM法
差分GMM法(Anderson-Bond估计量)
- 前提条件
ε i , t 不 存 在 自 相 关 \varepsilon_{i,t}不存在自相关 εi,t不存在自相关
根据上面的逻辑, y i , t − 3 , y i , t − 4 , y i , t − 5 , y i , t − 6 . . . y_{i,t-3},y_{i,t-4},y_{i,t-5},y_{i,t-6}... yi,t−3,yi,t−4,yi,t−5,yi,t−6...都是良好的工具变量。
存在以下四个问题: - 如果 x i t x_{it} xit仅为前定变量,而非严格的外生变量,即虽然 x i t 与 当 期 ε i , t x_{it}与当期\varepsilon_{i,t} xit与当期εi,t不相关,但与 ε i , t − 1 \varepsilon_{i,t-1} εi,t−1相关,此时经过差分后
Δ x i , t 与 Δ ε i , t \Delta x_{i,t}与\Delta \varepsilon_{i,t} Δxi,t与Δεi,t可能相关,导致 Δ x i , t \Delta x_{i,t} Δxi,t成为内生变量。此时可以使用
x i , t − 1 , x i , t − 2 , x i , t − 3 . . . x_{i,t-1},x_{i,t-2},x_{i,t-3}... xi,t−1,xi,t−2,xi,t−3...做工具变量。 - 如果 T T T很大,会有很多的工具变量,可能会导致弱工具变量问题(滞后期越多,相关性越弱)
另一个后果是:弱化Hansen统计量(用于工具变量的过度识别)导致P值不显著。解决方法是,使用xtabond限制最多使用q阶滞后变量作为工具变量。解决方法之二:使用折叠的IV式工具变量。 - 不随时间变化的 z i z_i zi被消掉了,故差分GMM无法估计不随时间变化的量。
- 如果序列 y i , t y_{i,t} yi,t具有很强的持续性,即一阶自回归系数接近1,则 y i , t − 2 与 Δ y i , t − 1 y_{i,t-2}与 \Delta y_{i,t-1} yi,t−2与Δyi,t−1相关性就会很弱,导致弱工具变量问题。在极端条件下, y i t y_{it} yit为随机游走,导致 Δ y i , t − 1 \Delta y_{i,t-1} Δyi,t−1为白噪声,所以 y i , t − 2 与 Δ y i , t − 1 y_{i,t-2}与 \Delta y_{i,t-1} yi,t−2与Δyi,t−1完全不相关。
水平GMM
- 为了解决不随时间变化的量被消去和随机游走。
重新讨论:
y i t = α + ρ y i , t − 1 + x i , t ′ β + z i ′ δ + u i + ε i , t ; ( t = 2 , 3 , 4... , T ) y_{it}=\alpha + \rho y_{i,t-1}+x'_{i,t}\beta +z_i'\delta+u_i+\varepsilon_{i,t};(t = 2,3,4...,T) yit=α+ρyi,t−1+xi,t′β+zi′δ+ui+εi,t;(t=2,3,4...,T)
使用 Δ y i , t − 1 , Δ y i , t − 2 , Δ y i , t − 3 , Δ y i , t − 4 . . . \Delta y_{i,t-1},\Delta y_{i,t-2},\Delta y_{i,t-3},\Delta y_{i,t-4}... Δyi,t−1,Δyi,t−2,Δyi,t−3,Δyi,t−4...作为 y i , t − 1 y_{i,t-1} yi,t−1的工具变量,显然两者是相关的。同时因为 ε i , t \varepsilon_{i,t} εi,t不存在自相关,所以 Δ y i , t − 1 , Δ y i , t − 2 , Δ y i , t − 3 \Delta y_{i,t-1},\Delta y_{i,t-2},\Delta y_{i,t-3} Δyi,t−1,Δyi,t−2,Δyi,t−3与 ε i , t \varepsilon_{i,t} εi,t不相关。但是要有假设 Δ y i , t − 1 , Δ y i , t − 2 . . . 与 u i 不 相 关 。 \Delta y_{i,t-1},\Delta y_{i,t-2}...与u_i不相关。 Δyi,t−1,Δyi,t−2...与ui不相关。
因此,使用 Δ y i , t − 1 , Δ y i , t − 2 , Δ y i , t − 3 , Δ y i , t − 4 . . . \Delta y_{i,t-1},\Delta y_{i,t-2},\Delta y_{i,t-3},\Delta y_{i,t-4}... Δyi,t−1,Δyi,t−2,Δyi,t−3,Δyi,t−4...作为 y i , t − 1 y_{i,t-1} yi,t−1的工具变量称为水平GMM.
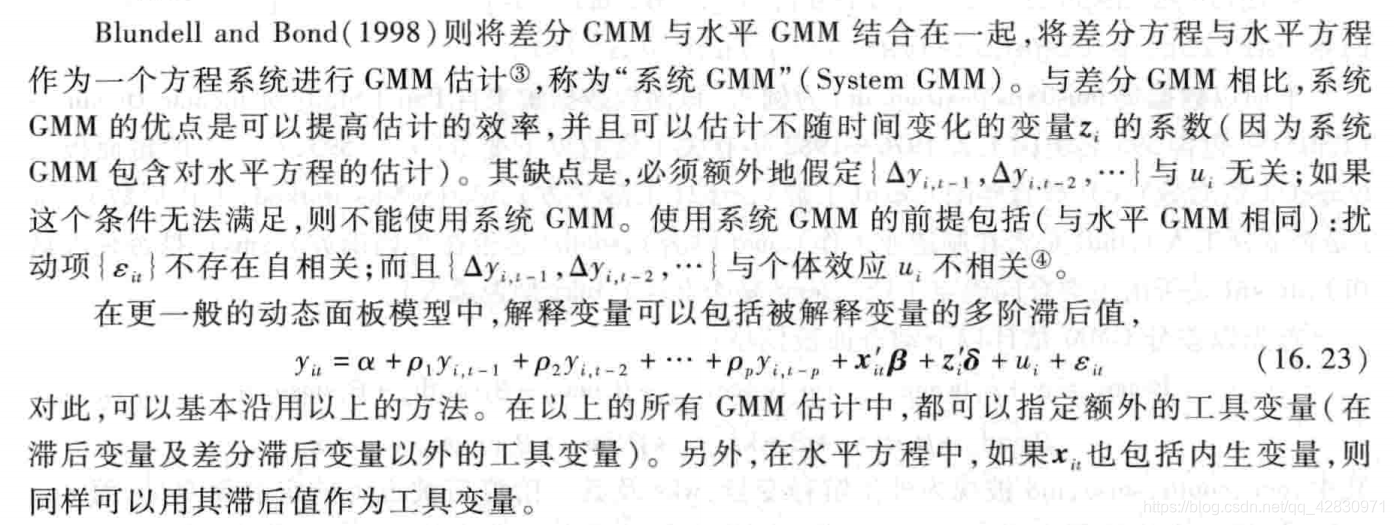
系统GMM
将差分方程与系统方程作为一个方程做系统的GMM回归。
截图了