BIT数字图像处理大作业——纯C++实现车道线检测
本文禁止转载,违者必究!
1. 前言:
没错这又是大作业,这次是数字图像处理的作业:
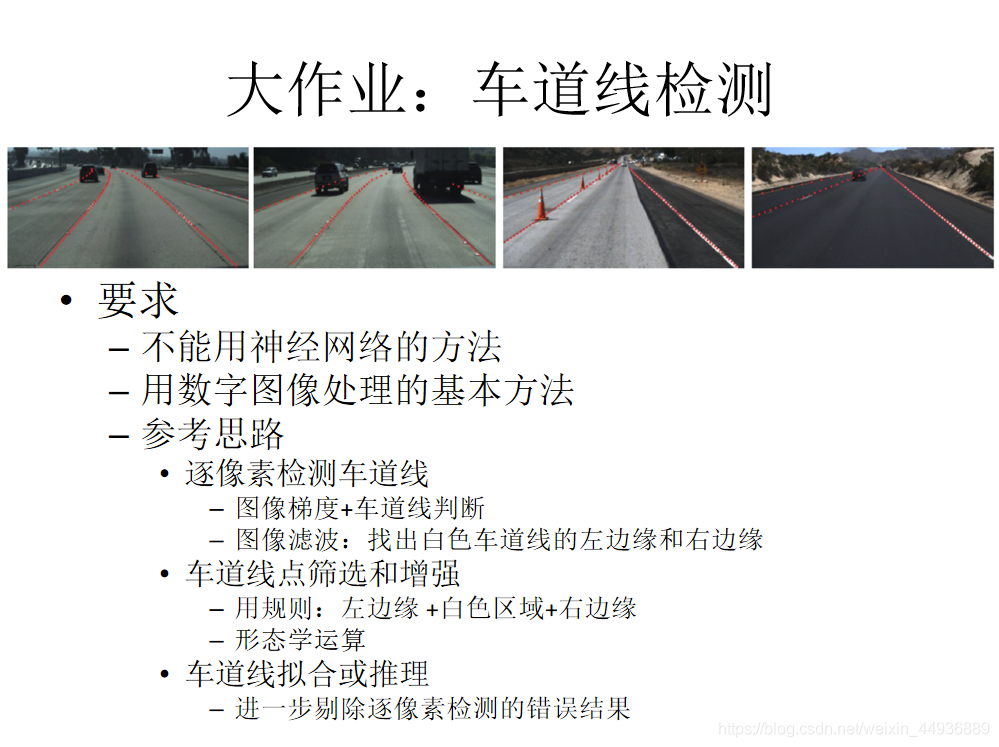

本来打算用 LaneNet 搞定,结果发现要求是:
- 不能用神经网络(即不能用图像分割算法了);
- 除读取和显示图像,不能用Opencv(即不能调包);
所以只能老老实实手写那些图像处理代码了。
2. 基本思路:
目前的基本思路如下:
- 将图像转到灰度图;
- 使用直方图均衡化预处理图像;
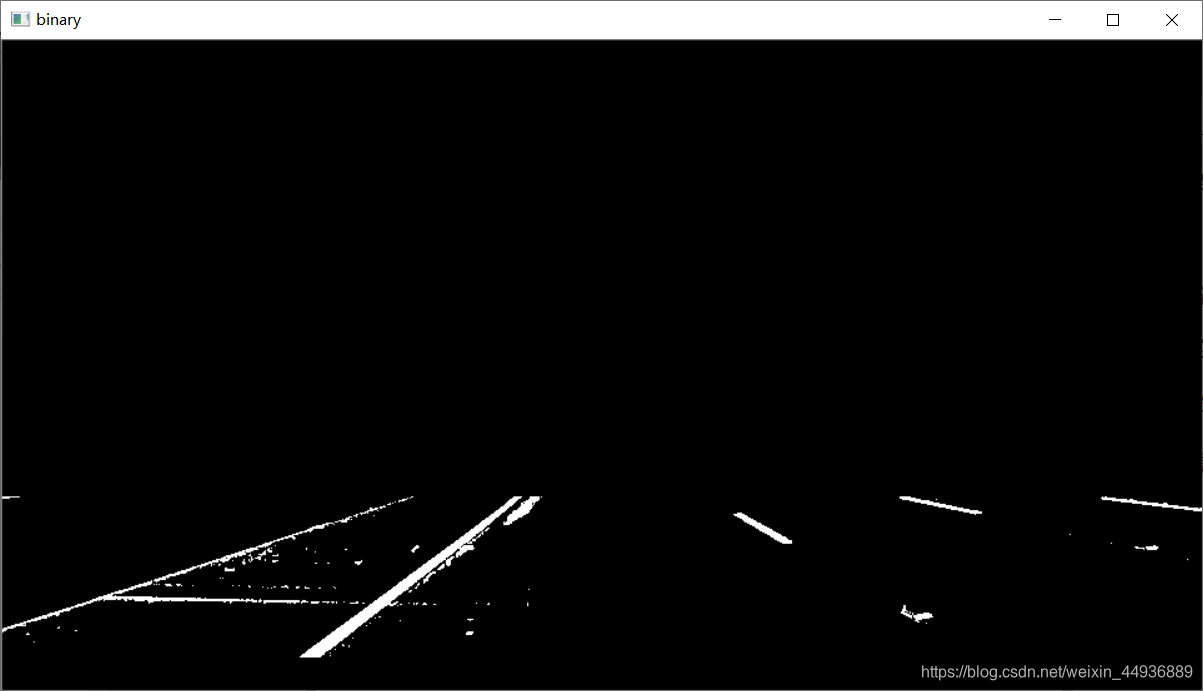
- 使用阈值分割方法绘制车道线二值图;
- 对二值图使用中值滤波去除噪点;
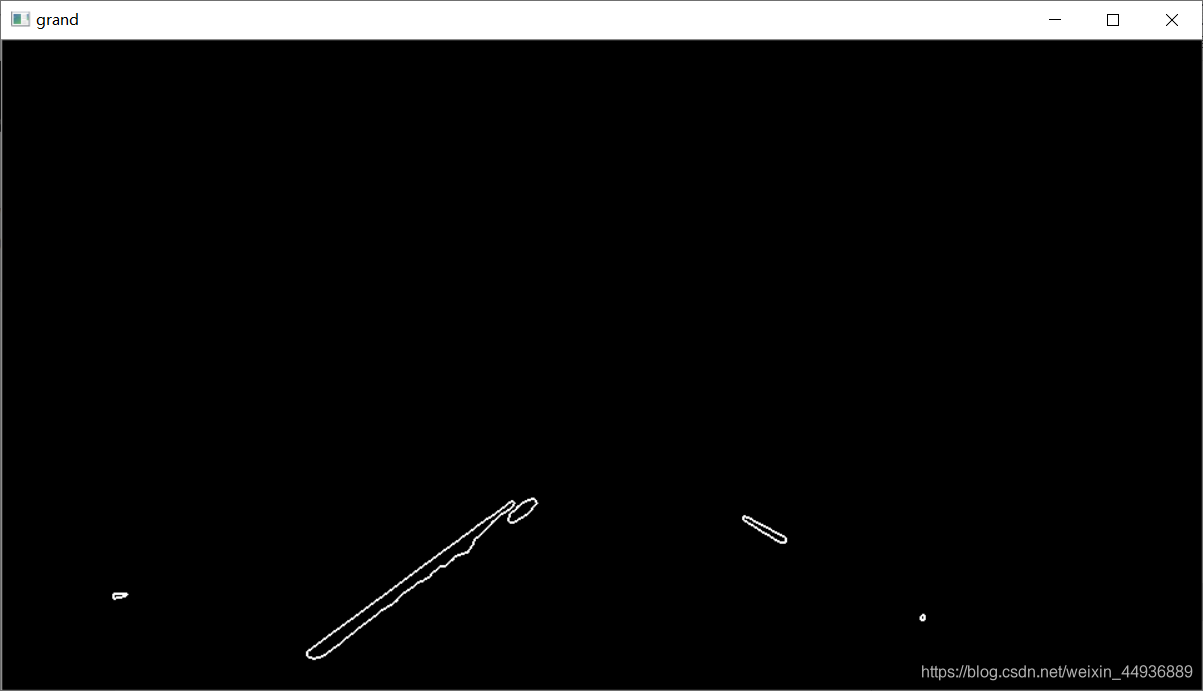
- 对二值图使用边缘检测算子进行滤波操作;
- 使用霍夫变换进行直线检测;
- 使用聚类算法聚集直线束(还没写);
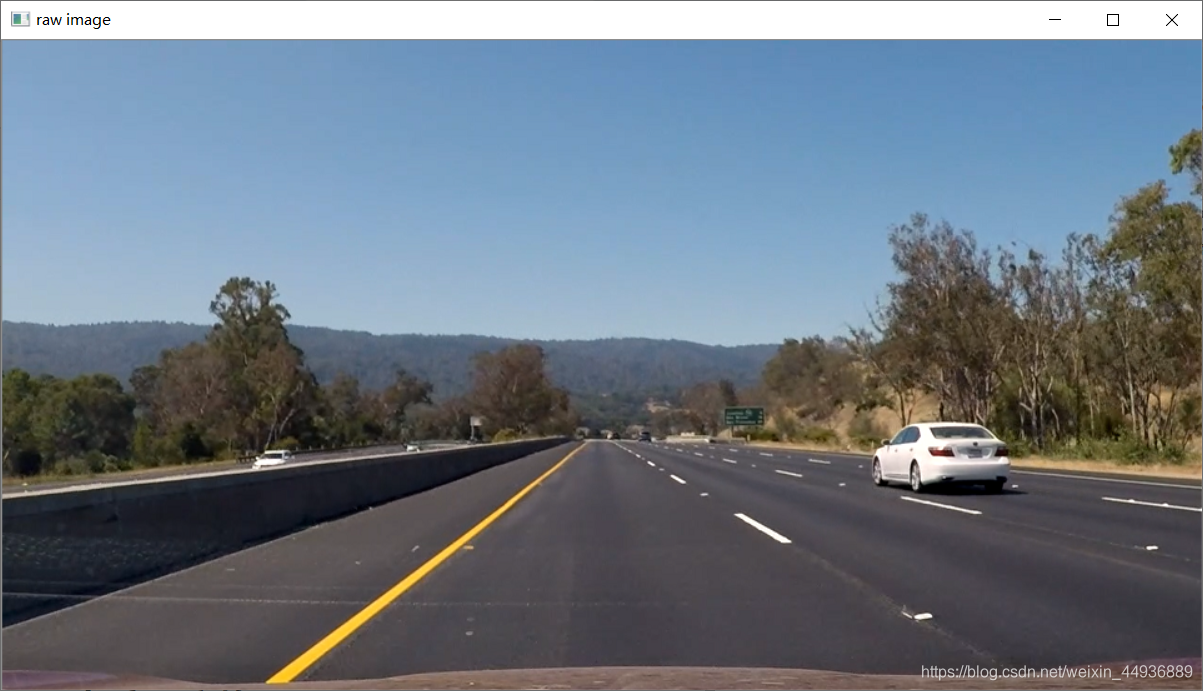
原图:
3. 灰度图变换:
cv::Mat Color2Gray(cv::Mat src_image)
{
cv::Mat gray_image(src_image.rows, src_image.cols, CV_8UC1);
if (src_image.channels() != 1)
{
for (int i = 0; i < src_image.rows; i++)
for (int j = 0; j < src_image.cols; j++)
gray_image.at<uchar>(i, j) = (src_image.at<cv::Vec3b>(i, j)[0] + src_image.at<cv::Vec3b>(i, j)[1] + src_image.at<cv::Vec3b>(i, j)[2]) / 3;
}
else
gray_image = src_image.clone();
return gray_image;
效果:

4. 直方图均衡化:
cv::Mat equalize_hist(cv::Mat input) {
cv::Mat output = input.clone();
int gray_sum = input.cols * input.rows;
int gray[256] = {
0 }; //记录每个灰度级别下的像素个数
double gray_prob[256] = {
0 }; //记录灰度分布密度
double gray_distribution[256] = {
0 }; //记录累计密度
int gray_equal[256] = {
0 }; //均衡化后的灰度值
//统计每个灰度下的像素个数
for (int i = 0; i < input.rows; i++)
{
uchar* p = input.ptr<uchar>(i);
for (int j = 0; j < input.cols; j++)
{
int vaule = p[j];
gray[vaule]++;
}
}
//统计灰度频率
for (int i = 0; i < 256; i++)
{
gray_prob[i] = ((double)gray[i] / gray_sum);
}
//计算累计密度
gray_distribution[0] = gray_prob[0];
for (int i = 1; i < 256; i++)
{
gray_distribution[i] = gray_distribution[i - 1] + gray_prob[i];
}
//重新计算均衡化后的灰度值
for (int i = 0; i < 256; i++)
{
gray_equal[i] = (uchar)(255 * gray_distribution[i] + 0.5);
}
//直方图均衡化,更新原图每个点的像素值
for (int i = 0; i < output.rows; i++)
{
uchar* p = output.ptr<uchar>(i);
for (int j = 0; j < output.cols; j++)
{
p[j] = gray_equal[p[j]];
}
}
return output;
}

5. 阈值分割:
cv::Mat Image2Binary(cv::Mat src_image, int threshold, float init_h, float end_h) {
int value;
float start_i = init_h*float(src_image.rows);
float end_i = end_h * float(src_image.rows);
cv::Mat binary_image(src_image.rows, src_image.cols, CV_8UC1);
for (int i = 0; i < src_image.rows; i++) {
for (int j = 0; j < src_image.cols; j++) {
value = src_image.at<uchar>(i, j);
if (value > threshold && i > start_i && i < end_i) {
binary_image.at<uchar>(i, j) = 255;
}
else {
binary_image.at<uchar>(i, j) = 0;
}
}
}
return binary_image;
}
6. 中值滤波:
cv::Mat BiMedianBlur(cv::Mat src_image, int size) {
int count_w, count_b, value, ds=(size-1)/2;
cv::Mat result(src_image.rows, src_image.cols, CV_8UC1);
for (int i = 0; i < src_image.rows; i++) {
for (int j = 0; j < src_image.cols; j++) {
count_w = 0;
count_b = 0;
for (int di = -ds; di < ds; di++) {
for (int dj = -ds; dj < ds; dj++) {
if (i + di >= 0 && j + dj >= 0) {
if (i + di < src_image.rows && j + dj < src_image.cols) {
value = src_image.at<uchar>(i+di, j+dj);
if (value == 0) {
count_b += 1;
}
else {
count_w += 1;
}
}
}
}
}
if (count_b > count_w) {
result.at<uchar>(i, j) = 0;
}
else {
result.at<uchar>(i, j) = 255;
}
}
}
return result;
}

7. 边缘检测:
cv::Mat ConvLap(cv::Mat src_image, int thresh) {
int value;
cv::Mat result = cv::Mat::zeros(src_image.size(), CV_8U);
for (int i = 1; i < src_image.rows - 1; i++) {
for (int j = 1; j < src_image.cols - 1; j++) {
value = -4 * src_image.at<uchar>(i, j);
value += src_image.at<uchar>(i - 1, j);
value += src_image.at<uchar>(i + 1, j);
value += src_image.at<uchar>(i, j - 1);
value += src_image.at<uchar>(i, j + 1);
if (value < 0) {
value = -value;
}
if (value > thresh) {
value = 255;
}
else
{
value = 0;
}
result.at<uchar>(i, j) = value;
}
}
return result;
}
8. 直线检测:
std::vector<float> hough_line_v(cv::Mat img, int threshold)
{
int row, col;
int i, k;
//参数空间的参数极角angle(角度),极径p;
int angle, p;
//累加器
int **socboard;
int *buf;
int w, h;
w = img.cols;
h = img.rows;
int Size;
int offset;
std::vector<float> lines;
//申请累加器空间并初始化
Size = w * w + h * h;
Size = 2 * sqrt(Size) + 100;
offset = Size / 2;
socboard = (int **)malloc(Size * sizeof(int*));
if (!socboard)
{
printf("mem err\n");
return lines;
}
for (i = 0; i < Size; i++)
{
socboard[i] = (int *)malloc(181 * sizeof(int));
if (socboard[i] == NULL)
{
printf("buf err\n");
return lines;
}
memset(socboard[i], 0, 181 * sizeof(int));
}
//遍历图像并投票
int src_data;
p = 0;
for (row = 0; row < img.rows; row++)
{
for (col = 0; col < img.cols; col++)
{
//获取像素点
src_data = img.at<uchar>(row, col);
if (src_data == 255)
{
for (angle = 0; angle < 181; angle++)
{
p = col * cos(angle * PI / 180.0) + row * sin(angle * PI / 180.0) + offset;
//错误处理
if (p < 0)
{
printf("at (%d,%d),angle:%d,p:%d\n", col, row, angle, p);
printf("warrning!");
printf("size:%d\n", Size / 2);
continue;
}
//投票计分
socboard[p][angle]++;
}
}
}
}
//遍历计分板,选出符合阈值条件的直线
int count = 0;
int Max = 0;
int kp, kt, r;
kp = 0;
kt = 0;
for (i = 0; i < Size; i++)//p
{
for (k = 0; k < 181; k++)//angle
{
if (socboard[i][k] > Max)
{
Max = socboard[i][k];
kp = i - offset;
kt = k;
}
if (socboard[i][k] >= threshold)
{
r = i - offset;
//lines_w.push_back(std::);
lines.push_back(-1.0 * float(std::cos(k*PI / 180) / std::sin(k*PI / 180)));
lines.push_back(float(r)/std::sin(k*PI / 180));
count++;
}
}
}
//释放资源
for (int e = 0; e < Size; e++)
{
free(socboard[e]);
}
free(socboard);
return lines;
}

9. 后续思路:
可以看到,上面的处理其实效果还ok,但是我们也错过了一些其他的直线。
后续的思路可以观察这张图:
- 我们可以减小中值滤波器大小,二而使用自定义算子去去除水平的干扰线;
- 对不同的连通区域分别生成二值图,然后分别做霍夫变换,防止交叉线的产生;
- 暂时还没有别的思路了。
获取完整项目代码:
感兴趣的同学关注我的公众号——可达鸭的深度学习教程,回复“车道线”获取完整Visual Studio项目:
