恭喜你发现宝藏
前言
终于来到了心心念念的SLAM学习环节,相信看到这篇文章的你也和我一样按耐不住心中的紧张与激动,那就一起开始卷吧!
在本篇我将简单概述SLAM14讲各个环节的最基本的知识,主要是帮你看看14讲都讲了啥。
想要进一步学习还是看书吧!
Let’s 冲冲冲!
第一讲 预备知识
SLAM:Simultaneous Localization and Mapping
中文名:同时定位与地图构建
基本定义:搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。
这里的传感器主要为相机,则为“视觉SLAM”
章节划分
整书分为两大部分:
- 视觉基础篇 1-6讲
- 实践应用篇 7-14讲
第1讲:预备知识
第2讲:SLAM系统概述,介绍SLAM组成模块,各模块具体工作。编程环境搭建以及IDE使用
第3讲:三维刚体运动,主要了解旋转矩阵,欧拉角,四元数,练习使用Eigon
第4讲:学习李群和李代数,定义及使用方式;练习使用Sophus操作
第5讲:针孔相机模型,图像在计算机中的表达;用OpenCV调用相机内外参
第6讲:非线性优化,包括状态估计理论基础,最小二乘问题,梯度下降法;使用Ceres和g2o进行曲线拟合实验
第7讲:基于特征点法视觉里程计,特征提取与匹配,对极几何约束的计算、PnP和ICP等。利用以上方法估计两个图像之间的运动。
第8讲:直接法视觉里程计,学习光流法和直接法原理,利用以上方法实现简单的直接法运动估计。
第9讲:后端优化,主要对Bundle Adjustment(BA)深入讨论,利用稀疏性加速求解过程,利用Ceres和g2o分别书写BA程序。
第10讲:后端优化中的位姿图,介绍SE(3),Sim(3)位姿图,使用g2o对一个位姿球进行优化
第11讲:回环检测,介绍以词袋模型为主的回环检测,使用DBoW3书写字典训练程序和回环检测程序
第12讲:地图构建,使用单目进行稠密深度图的估计,讨论RGB-D的稠密地图构建过程
第13讲:工程实践,搭建双目视觉里程计框架,综合运用之前的知识,利用Kitti数据集测试性能
第14讲:介绍当前开源SLAM方案以及未来的发展方向
需要具备的基础知识
- 高等数学、线性代数、概率论
- C++语言基础
- Linux系统基础
第二讲 初识SLAM
SLAM回答了两个关键问题:
- 我在什么地方?——定位
- 周围环境怎么样?——建图
传感器 Sensors
两类传感器:
安装于环境中的:二维码,GPS,
携带于机器人本体的:
对比激光和相机两大类传感器,激光建图基本上已经研究清楚,视觉SLAM还没有稳定可靠运行
摄像头:轻便、便宜、信息丰富
缺点:遮挡、受光照影响、计算量大、
单目,双目,深度相机(TOF/结构光)
经典视觉SLAM框架
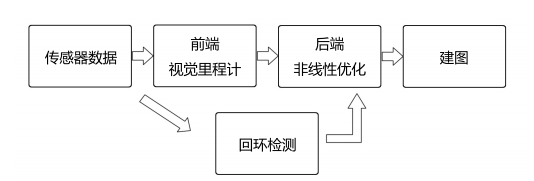
- 传感器信息读取:在视觉SLAM中主要为相机图像信息的读取和预处理。如果是机器人中,还可能是码盘、惯性传感器等信息的读取和同步
- 前端视觉里程计(Visual Odometry,VO):视觉里程计的任务是估算相邻图像间相机的运动,以及局部地图的样子,又称为前端(Front End)
- 后端非线性优化(Optimization):后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对他们进行优化,得到全局一致的地图。由于在VO之后,又被称为后端(Back End)
- 回环检测(Loop Closure Detection):回环检测机器人是否到达过先前的位置,如果检测到回环,它会把信息提供给后端进行处理。
- 建图(mapping):它根据估计的轨迹,建立与任务要求对应的地图
SLAM问题的数学表述
关于SLAM的数学描述,主要有两个方程,分别为位置方程和观测方程:
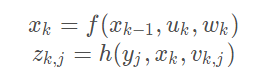
xk表示机器人当前所处的位置,uk是运动传感器的读数或者输入,zkj是机器人与环境特征建立的观测数据
另外,无论是位置方程还是观测方程均要引入噪声,也就是式子中的w和v,也因此需要在后端进行优化,或者说状态估计,来找到一个最有可能的位姿图。
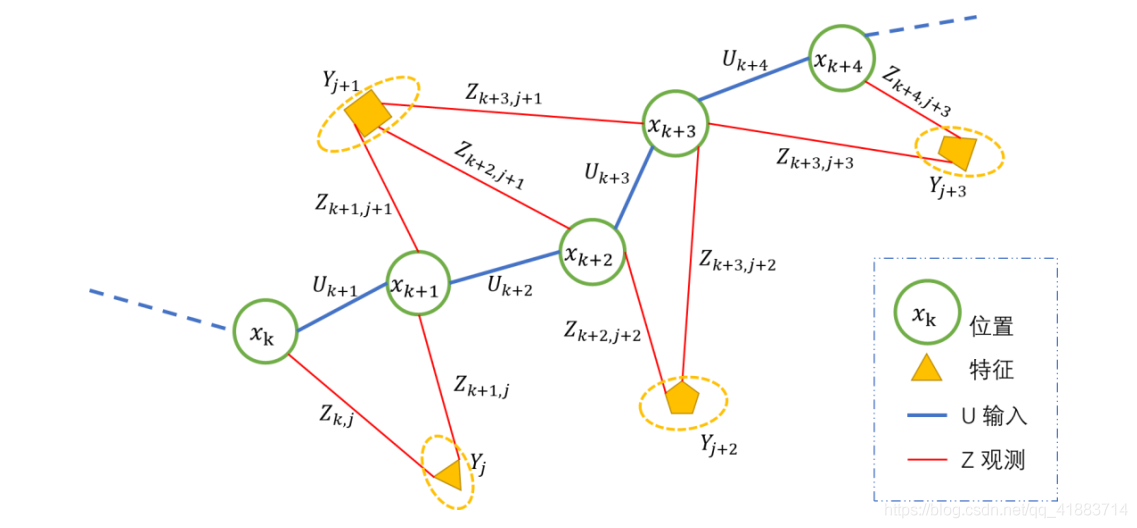
可以参照下图有一个更加清楚地认识
编程基础Linux
可以参照我的另一篇博文,记录了Linux最基本的操作指令,对于初学者可以减少学习负担
Linux基本知识学习笔记(常用指令)
使用Cmake
该部分还不是很了解,可以简单理解为会有一个CmakeList来帮助工程判断如何编译
在Linux中,当我们写完源代码后,需要通过编译,将多文件工程建立联系,并生成可执行文件,以此来实现调试运行,Cmake则可以为工程生成一个makefile文件,之后使用make命令(C++库使用g++进行编译)根据makefile文件中的内容编译整个工程
在书中简单介绍了自己使用命令行及cmake建立工程并运行的例子,比较有意思
第三讲 三维空间的刚体运动
- 本讲目标:理解刚体运动描述方式、旋转矩阵、变换矩阵、四元数和欧拉角
- 掌握Eigen库的矩阵,几何模块的使用方法
3.1 点、向量和坐标系,旋转矩阵
- 点存在于三维空间中
- 点和电可以组成向量
- 点本身由原点指向它的向量描述
向量:带指向的箭头,可以进行加法减法等运算
向量的坐标:可以用R3坐标表示
坐标系:由三个正交的轴组成
构成线性空间的一组基
分为左手系和右手系
向量运算:加减法,内积,外积
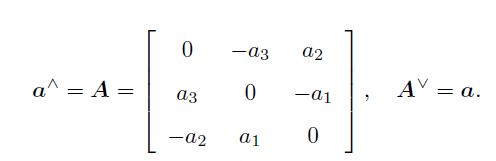
关于外积,引入了小尖^,表示将一个向量变成一个矩阵
在SLAM中:
- 有固定的世界坐标系和移动的机器人坐标系
- 机器人坐标系随着机器人的运动而改变,每个时刻都有新的坐标系
两个坐标系如何变换?原点间的平移和三个轴的旋转
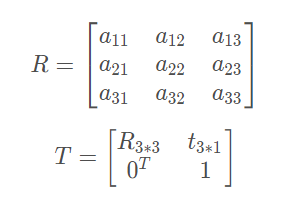
旋转矩阵:
充分必要条件:
- R是一个正交矩阵,矩阵的逆等于转置
- R的行列式为1
三维空间旋转:SO(3) 也成为特殊正交群,群的概念在李代数再探讨
用四个数描述三维坐标,可以实现同时表示平移和旋转。
这种做法称为齐次坐标。
此时旋转和平移可以放入一个矩阵,称为变换矩阵。
旋转矩阵与变换矩阵如下(非齐次形式)
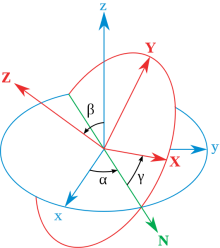
3.3 欧拉角
欧拉角描述了刚体围绕三个轴旋转的角度
不同的旋转顺序对应不同的欧拉角,常用的是ZYX顺序,即“偏航-俯仰-滚转”
欧拉角存在万向锁问题,可能会在一些情况下失去一个自由度
对于万向锁问题,可以拿手机测试(或者任何物体),一旦有绕一个轴±90度旋转,那么其余两轴的作用效果将相同,失去了一个维度的信息,很有意思。
事实上,我们找不到不带奇异性的三维向量描述方式
所以用四元数这个四个维度的描述方式来表示旋转
3.4 四元数
一种扩展的复数
四元数有三个虚部,可以表达三维空间的旋转
虚部之间有特定的运算关系,有点想三维空间中的叉积
四元数有很多特定的公式,包括四元数的逆(对于表述旋转很重要)
注意: Eigon库中对四元数乘法进行了重载,不必写出四元数的逆,运算符重载自动完成了这一步。
第四讲 李群和李代数
研究李群和李代数的根本目的:
- 将旋转矩阵变为可以加减的形式
- 消除后端优化中的约束问题
通过李群—李代数之间的转换关系,希望把位姿估计变成无约束的优化问题。
李群和李代数基础
我们之前接触了两个群:
- 特殊正交群:SO(3) 三维空间的旋转矩阵,是一个正交矩阵,且行列式为1,则为旋转矩阵
- 特殊欧式群:SE(3) 包含三维空间旋转矩阵R,平移向量t,0^T和1的四维空间变换矩阵,即为三维欧式变换群
群(group):是一种集合加上一种运算的代数结构,这个运算要满足“封结幺逆”四个条件
- 封闭性
- 结合律
- 幺元
- 逆
李群(Lie Group):是指具有连续(光滑)性质的群
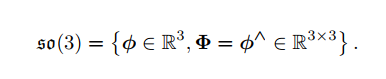
反对称矩阵:对于一个向量,可以将其变成反对称矩阵,对于任意的反对称矩阵,也可以找到一个与之对应的向量,具体表示符号及含义如下图
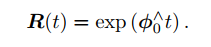
李代数Φ:它是SO(3)在原点附近的正切空间,有如下的近似计算公式,对旋转矩阵求导相当于左乘一个李代数反对称矩阵,旋转矩阵等于e的李代数反对称矩阵次幂

李代数由一个集合、一个数域、一个二元运算组成,如果他们满足以下几个特征,就称(V,F,[,])为一个李代数,记为g
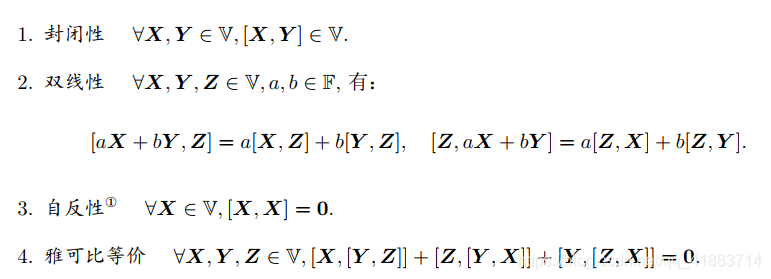
需要明确的是,李代数不加区分的表示三维向量及其反对称矩阵,如下公式可以看出这一点

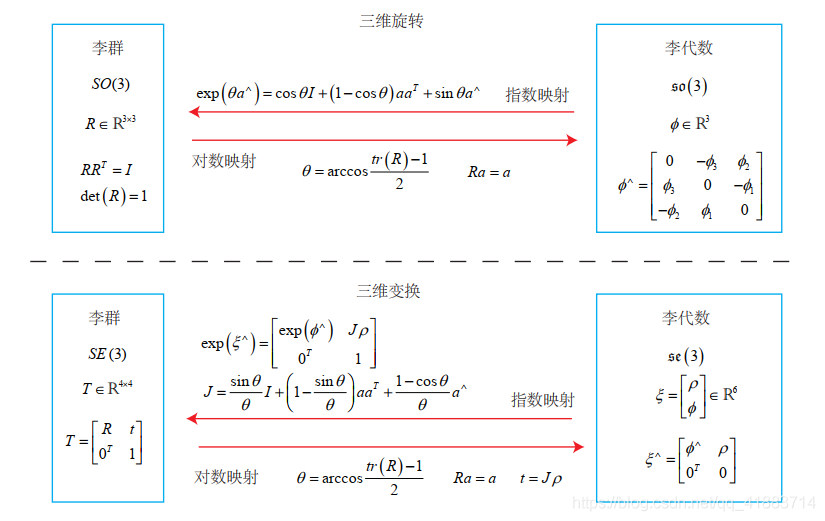
指数映射:在李群和李代数中,计算exp(Φ^)称为指数映射(Exponential Map)
对于某一个时刻(这很重要,不考虑时间t的影响),以SO(3)为例,有如下的等式成立

等式左边就是某个时刻的旋转矩阵(公式推导中本来是有一个t的),同时我们将李代数Φ等效为θa,θ为模长,a为长度为1的方向向量
特别的,上式和罗德里格斯公式如出一辙,这表明李代数so(3)实际上就是由所谓的旋转向量组成的空间,而指数映射即为罗德里格斯公式。
通过它们,我们将李代数so(3)中的任意一个向量对应到了一个位于李群SO(3)中的旋转矩阵。反之定义对数映射
对数映射:指数映射的逆过程,公式如下
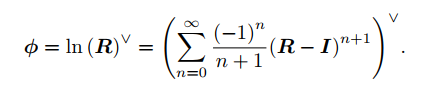
李群和李代数相互转化关系由如下关系图表示
**李代数求导问题:**在求解最优估计的时候,我们经常会构建与位姿有关的函数,然后讨论该函数关于位姿的导数,以调整当前的估计值。
李代数求导思路:
- 用李代数表示姿态,然后根据李代数加法对李代数求导
- 对李群左乘或右乘微小扰动,然后对该扰动求导,称为左扰动和右扰动模型。
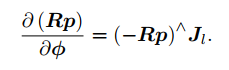
直接对李代数求导,结果如下,因为含有形式较为复杂的Jl,我们不喜欢该表示形式。
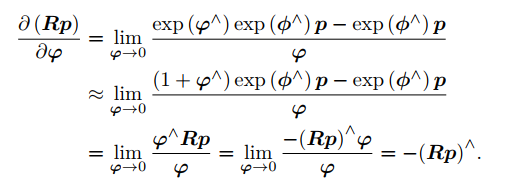
扰动模型求导,结果如下,需要理解下述公式,比较重要
实践Sophus
有待补充
第五讲 相机与图像
相机模型
相机将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)的过程,并能够使用一个几何模型进行描述。
其中最常用的为针孔模型。
另外,这里涉及到几个坐标系的转换关系。
四个坐标系:
世界坐标系–相机坐标系–图像坐标系–像素坐标系
世界坐标系:人为定义的一种最原始的基础坐标系,用来描述世界中各个物体所处的位置
相机坐标系:以相机光心为原点,相机自身的坐标系,是一个三维坐标系
图像坐标系:在相机的成像平面上,为了描述相机坐标系的成像情况,所建立的二维坐标系
像素坐标系:以成像平面左上角为原点,像素大小为坐标分度值,将图像坐标系上的图像转化为像素坐标信息,是最终获得图片的二维坐标系
针孔相机模型
针孔相机模型示意图如图所示
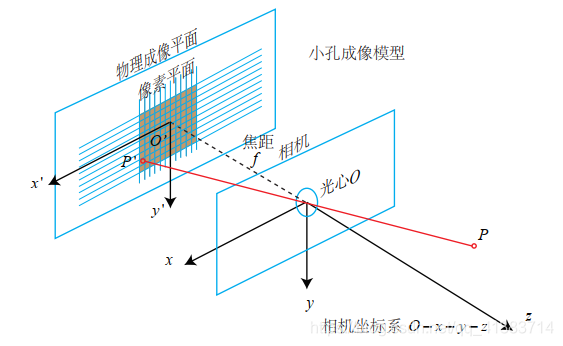
世界坐标系到相机坐标系:
从自定义的世界坐标系完成一次平移加旋转
相机坐标系到图像坐标系:
利用投影关系,根据相似定理,找到一种投影比例关系
图像坐标系到像素坐标系:
由于坐标尺度和原点不同,要进行伸缩和平移
有意思的是:我们利用单目相机拍摄时,会损失掉深度信息,这在计算过程中的归一化过程有所体现,从物理层面上来理解,只要一个物体的投影点保持不变,是可以在空间中任意遥远的距离移动,或者说近处的小物体和远处的大物体看起来可以完全相同
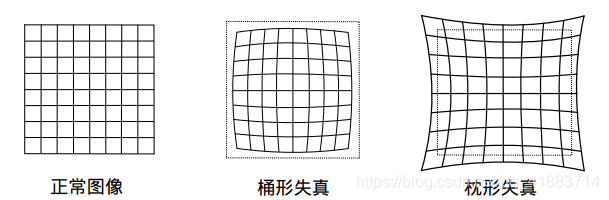
畸变模型
畸变分类:
- 径向畸变:由透镜形状引起的畸变:桶形畸变&枕形畸变
- 切向畸变:透镜和成像面未严格平行引入的畸变
实践部分
有待补充