轮廓发现
当通过阈值分割提取到图像中的目标物体后,就需要通过边缘检测来提取目标物体的轮廓,使用这两种方法基本能够确定物体的边缘或者前景。接下来,通常需要做的是拟合这些边缘的前景,如拟合出包含前景或者边缘像素点的最小外包矩形、圆、凸包等几何形状,为计算它们的面积或者模板匹配等操作打下坚实的基础。
一个轮廓代表一系列的点(像素),这一系列的点构成一个有序的点集,所以可以把一个轮廓理解为一个有序的点集。
轮廓发现是基于图像边缘提取的基础,寻找对象轮廓的方法,所以边缘提取的阈值选定会影响最终轮廓的发现

轮廓发现API
cv2.findContours()
cv2.drawContours()
通过cv2.findContours() 查找轮廓在哪里,再通过 cv2.drawContours()将查找的轮廓绘制出来。
contours,hierarchy=cv2.findContours(image,mode,method)
contours:轮廓
hierarchy:图像的拓扑信息(轮廓层次)(存储上一个轮廓,父轮廓…)
image:二值图像
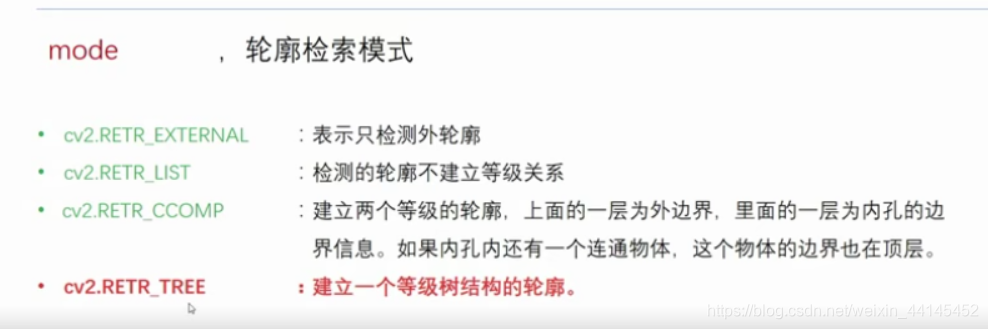
mode:轮廓检索方式
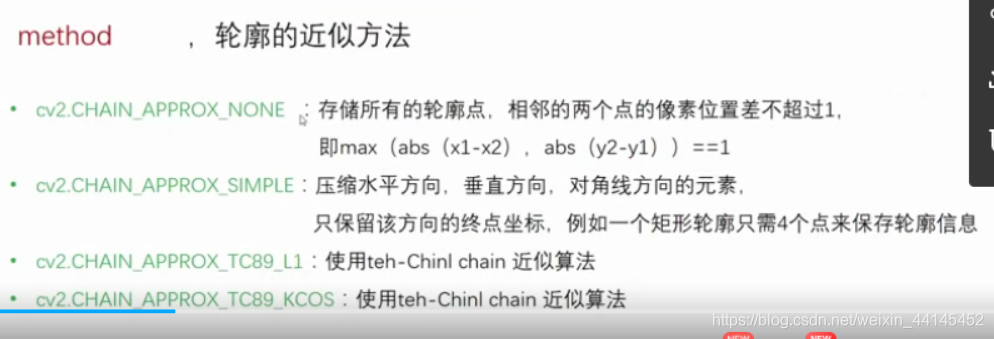
method:轮廓的近似方法
r=cv2.drawContours(image, contours, contourIdx, color[, thickness])
r:目标图像
image:原始图像
contours: 所有的输入轮廓边缘数组
contourIdx :需要绘制的边缘索引,如果全部绘制为-1。如果有多个目标,可以绘制第一个目标0,第二个目标1,第三个目标2.。
color:绘制的颜色,为BGR格式的SCalar
thickness:可选,绘制的密度,即轮廓的画笔粗细
import cv2 as cv
import numpy as np
def contours_demo(image):
dst = cv.GaussianBlur(image, (3, 3), 0)
gray = cv.cvtColor(dst, cv.COLOR_BGR2GRAY)
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)#cv.THRESH_OTSU自动寻找阈值
cv.imshow("binary image", binary)
cloneImage, contours, heriachy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
for i, contour in enumerate(contours):
cv.drawContours(image, contours, i, (0, 0, 255), 2)
print(i)
cv.imshow("detect contours", image)
src = cv.imread("C:/Users/lenovo/Desktop/opencv/daima/banknum/template-matching-ocr/images/circle.png") #读取图片位置
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
contours_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
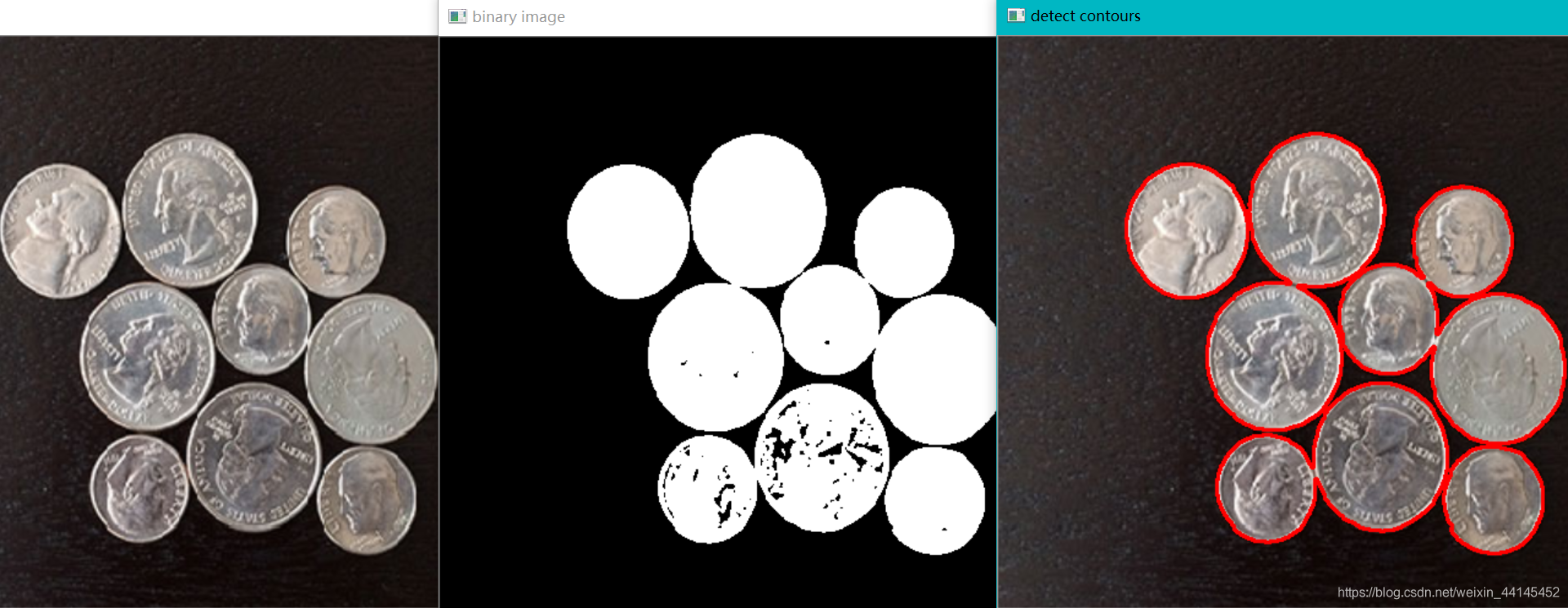
运行截图: