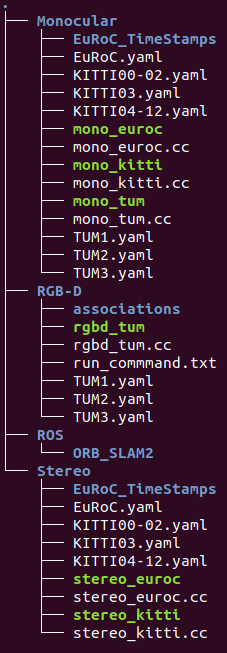
ORB-SLAM2项目的main()函数(即可执行文件)在Examples文件夹下,可以看到有四个子文件夹。Monocular,Stereo和RGB-D文件夹是对数据集中存储的场景进行SLAM,ROS目文件夹是利用ROS和相机进行实际场景的SLAM。
以对TUM数据集进行RGBD-SLAM为例。rgb_tum.cc为项目的可执行文件,主要有四部分:
- 载入图像 :根据命令行输入的参数,载入在相关文件夹下图像和时间戳。
LoadImages(strAssociationFilename, vstrImageFilenamesRGB, vstrImageFilenamesD, vTimestamps);*注 :该过程只是将图像的名称保存在相应的vector变量中。 - 创建SLAM系统:根据命令行输入的参数创建SLAM系统并进行系统初始化。
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::RGBD,true);其中:argv[1]表示词袋文件的路径,argv[2]表示配置文件的路径,ORB_SLAM2::System::RGBD表示创建SLAM系统为RGBD-SLAM系统,true表示进行可视化操作。 - 传入图像进行追踪 :通过一个循环过程将图像传入SLAM系统中进行追踪。
SLAM.TrackRGBD(imRGB,imD,tframe); - 停止SLAM系统并保存轨迹:通过
Shutdown()函数停止SLAM系统中的所有线程,利用SaveTrajectoryTUM()函数来保存轨迹。
参考链接:https://blog.csdn.net/u014709760/article/details/87922386
下面给出了代码以及注释:
#include<iostream>
#include<algorithm>
#include<fstream>
#include<chrono>
#include<opencv2/core/core.hpp>
#include<System.h>
using namespace std;
void LoadImages(const string &strAssociationFilename, vector<string> &vstrImageFilenamesRGB,
vector<string> &vstrImageFilenamesD, vector<double> &vTimestamps);
int main(int argc, char **argv)
{
// ./Examples/RGB-D/rgbd_tum -> arg[0] -> 运行rgbd_tum.cc文件,ORB_SLAM2的main函数
// Vocabulary/ORBvoc.txt -> arg[1] -> 词袋文件的路径
// Examples/RGB-D/TUM1.yaml -> arg[2] -> 配置文件的路径
// /media/Files/rgbdslam_DataSet/rgbd_dataset_freiburg1_desk -> arg[3] -> 下载的数据集文件夹
// Examples/RGB-D/associations/fr1_desk.txt -> arg[4] -> 关联文件的路径
if(argc != 5)
{
cerr << endl << "Usage: ./rgbd_tum path_to_vocabulary path_to_settings path_to_sequence path_to_association" << endl;
return 1;
}
// Retrieve paths to images
vector<string> vstrImageFilenamesRGB;
vector<string> vstrImageFilenamesD;
vector<double> vTimestamps;
string strAssociationFilename = string(argv[4]);
//loadImage用于获取RGB和深度图像的路径,保存于vstrImageFilenamesRGB和vstrImageFilenamesD,
//时间戳保存于vTimestamps
LoadImages(strAssociationFilename, vstrImageFilenamesRGB, vstrImageFilenamesD, vTimestamps);
// Check consistency in the number of images and depthmaps
int nImages = vstrImageFilenamesRGB.size();
if(vstrImageFilenamesRGB.empty())
{
cerr << endl << "No images found in provided path." << endl;
return 1;
}
else if(vstrImageFilenamesD.size()!=vstrImageFilenamesRGB.size())
{
cerr << endl << "Different number of images for rgb and depth." << endl;
return 1;
}
// Create SLAM system. It initializes all system threads and gets ready to process frames.
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::RGBD,true); // -> System.cc, 创建了System类的对象
// Vector for tracking time statistics,每一帧处理时间?
vector<float> vTimesTrack;
vTimesTrack.resize(nImages);
cout << endl << "-------" << endl;
cout << "Start processing sequence ..." << endl;
cout << "Images in the sequence: " << nImages << endl << endl;
// Main loop
cv::Mat imRGB, imD;
for(int ni=0; ni<nImages; ni++)
{
// Read image and depthmap from file,CV_LOAD_IMAGE_UNCHANGED->加载原图
imRGB = cv::imread(string(argv[3])+"/"+vstrImageFilenamesRGB[ni],CV_LOAD_IMAGE_UNCHANGED);
imD = cv::imread(string(argv[3])+"/"+vstrImageFilenamesD[ni],CV_LOAD_IMAGE_UNCHANGED);
double tframe = vTimestamps[ni];
if(imRGB.empty())
{
cerr << endl << "Failed to load image at: "
<< string(argv[3]) << "/" << vstrImageFilenamesRGB[ni] << endl;
return 1;
}
#ifdef COMPILEDWITHC11 //时间点,steady_clock最短时间间隔0.1us
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
#endif
// Pass the image to the SLAM system,,传入图像进行追踪
SLAM.TrackRGBD(imRGB,imD,tframe);
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t2 = std::chrono::monotonic_clock::now();
#endif
//duration还有一个成员函数count()返回Rep类型的Period数量(如0.01s,0.01->Rep,s->period)
//Rep表示一种数值类型,用来表示Period的数量,比如int float double
// Period是ratio类型,用来表示时间单位,比如second milisecond
double ttrack= std::chrono::duration_cast<std::chrono::duration<double> >(t2 - t1).count(); //持续时间
vTimesTrack[ni]=ttrack;
// Wait to load the next frame
double T=0;
if(ni<nImages-1)
T = vTimestamps[ni+1]-tframe; //当前帧和下一帧的时间间隔
else if(ni>0)
T = tframe-vTimestamps[ni-1]; //0~ni-1,ni-1是最后一帧 ,防止越界
if(ttrack<T)
usleep((T-ttrack)*1e6); //主线程等待
}
// Stop all threads
SLAM.Shutdown();
// Tracking time statistics
sort(vTimesTrack.begin(),vTimesTrack.end());
float totaltime = 0;
for(int ni=0; ni<nImages; ni++)
{
totaltime+=vTimesTrack[ni];
}
cout << "-------" << endl << endl;
cout << "median tracking time: " << vTimesTrack[nImages/2] << endl;
cout << "mean tracking time: " << totaltime/nImages << endl;
// Save camera trajectory
SLAM.SaveTrajectoryTUM("CameraTrajectory.txt");
SLAM.SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory.txt");
return 0;
}
void LoadImages(const string &strAssociationFilename, vector<string> &vstrImageFilenamesRGB,
vector<string> &vstrImageFilenamesD, vector<double> &vTimestamps)
{
ifstream fAssociation; //文件读操作
//在fstream类中,成员函数open()实现打开文件的操作,从而将数据流和文件进行关联
fAssociation.open(strAssociationFilename.c_str());
//C++ eof()函数可以帮助我们用来判断文件是否为空,或是判断其是否读到文件结尾。
while(!fAssociation.eof())
{
string s;
getline(fAssociation,s);
if(!s.empty())
{
stringstream ss;
ss << s;
double t;
string sRGB, sD;
ss >> t;
vTimestamps.push_back(t);
ss >> sRGB;
vstrImageFilenamesRGB.push_back(sRGB);
ss >> t;
ss >> sD;
vstrImageFilenamesD.push_back(sD);
}
}
}