误差关于位姿的雅克比矩阵推导
今天看到后端优化的关于位姿图优化部分,对于误差关于两个位姿的雅克比矩阵推导部分理解遇到了一些困难。书中直接给 T i T_i Ti和 T j T_j Tj各乘了一个左扰动,然后就开始推导了。
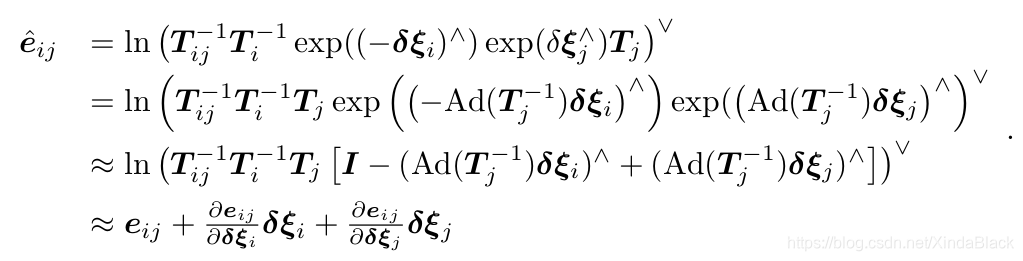 倒数第三行到倒数第二行的近似运用了Taylor Expansion,倒数第二行到倒数第一行的近似是什么原理就不太清楚了。(希望如果有知道其中原理的大神看到了,能在评论里给出解释或者推导过程的连接,谢谢!)
倒数第三行到倒数第二行的近似运用了Taylor Expansion,倒数第二行到倒数第一行的近似是什么原理就不太清楚了。(希望如果有知道其中原理的大神看到了,能在评论里给出解释或者推导过程的连接,谢谢!)
现在我给出我自己的理解,分别求对两个位姿的雅克比矩阵。令 T i j − 1 T i − 1 T j T_{ij}^{-1}T_i^{-1}T_j Tij−1Ti−1Tj的李代数为 ξ e \xi_e ξe,给李群 T i T_i Ti一个左扰动,那么误差可以表示为
ξ e ^ = ln ( T i j − 1 T i − 1 exp ( ( − δ ξ i ) ∧ ) T j ) ∨ \hat{\xi_e} = \ln \Big( T_{ij}^{-1}T_i^{-1} \exp\big((-\delta\xi_i)^{\wedge}\big) T_j \Big)^{\vee} ξe^=ln(Tij−1Ti−1exp((−δξi)∧)Tj)∨
注意,书中误差用 e i j e_{ij} eij表示,按照定义的形式应该是一个 6 × 1 6\times 1 6×1维的向量,是个李代数,所以用 ξ e \xi_e ξe表示感觉不会存在误导。利用SE(3)上的伴随性质
ξ e ^ = ln ( T i j − 1 T i − 1 T j exp ( ( − A d ( T j − 1 ) δ ξ i ) ∧ ) ) ∨ \hat{\xi_e} = \ln \Big( T_{ij}^{-1}T_i^{-1}T_j \exp\big((-\mathrm{Ad}(T_j^{-1}) \delta\xi_i)^{\wedge}\big) \Big)^{\vee} ξe^=ln(Tij−1Ti−1Tjexp((−Ad(Tj−1)δξi)∧))∨
利用BCH右乘近似
ξ e ^ = ln ( exp ( ξ e ∧ ) exp ( ( − A d ( T j − 1 ) δ ξ i ) ∧ ) ) ∨ = − J r − 1 A d ( T j − 1 ) δ ξ i + ξ e \hat{\xi_e} = \ln \Big( \exp\big( \xi_e^\wedge \big) \exp\big((-\mathrm{Ad}(T_j^{-1}) \delta\xi_i)^{\wedge}\big) \Big)^{\vee} = -J_r^{-1}\mathrm{Ad}(T_j^{-1}) \delta\xi_i + \xi_e ξe^=ln(exp(ξe∧)exp((−Ad(Tj−1)δξi)∧))∨=−Jr−1Ad(Tj−1)δξi+ξe
再根据李代数的求导
∂ e i j ∂ δ ξ i = lim δ ξ i → 0 − J r − 1 A d ( T j − 1 ) δ ξ i + ξ e − ξ e δ ξ i = − J r − 1 A d ( T j − 1 ) \frac{\partial e_{ij}}{\partial \delta\xi_i} = \lim_{\delta\xi_i\rightarrow 0} \frac{-J_r^{-1}\mathrm{Ad}(T_j^{-1}) \delta\xi_i + \xi_e - \xi_e}{ \delta\xi_i} = -J_r^{-1}\mathrm{Ad}(T_j^{-1}) ∂δξi∂eij=δξi→0limδξi−Jr−1Ad(Tj−1)δξi+ξe−ξe=−Jr−1Ad(Tj−1)
同理,给李群 T j T_j Tj一个左扰动,在根据李代数求导,可以求得
∂ e i j ∂ δ ξ i = J r − 1 A d ( T j − 1 ) \frac{\partial e_{ij}}{\partial \delta\xi_i} = J_r^{-1}\mathrm{Ad}(T_j^{-1}) ∂δξi∂eij=Jr−1Ad(Tj−1)
课后习题1
根据上面的思路,如果误差定义为 Δ ξ i j = ξ i ∘ ξ j − 1 \Delta\xi_{ij}=\xi_i\circ\xi_j^{-1} Δξij=ξi∘ξj−1,左扰动雅克比矩阵可以表示为
∂ e i j ∂ δ ξ i = J r − 1 A d ( T j ) A d ( T i − 1 ) \frac{\partial e_{ij}}{\partial \delta\xi_i} = J_r^{-1}\mathrm{Ad}(T_j) \mathrm{Ad}(T_i^{-1}) ∂δξi∂eij=Jr−1Ad(Tj)Ad(Ti−1)
∂ e i j ∂ δ ξ i = − J r − 1 \frac{\partial e_{ij}}{\partial \delta\xi_i} = -J_r^{-1} ∂δξi∂eij=−Jr−1
按照此结果改写pose_graph_g2o_lie.cpp中误差和雅克比矩阵
//error
_error = (_measurement.inverse() * v1 * v2.inverse() ).log();
//jacobian
_jacobianOplusXi = J * v2.Adj() * v1.inverse().Adj();
_jacobianOplusXj = -J;
结果没有符合预期,误差是下降了,但是优化结束了还是很大,g2o_viewer显示的结果也不对。不过将linearizeOplus()函数注释掉,采用数值方式求解的雅克比矩阵,最后结果还是一样。个人猜测可能是这样误差定义成这样可能和g2o内部代码设定不匹配,当然也可能是上面的雅克比矩阵没求对,所以希望有这样尝试过的也可以分享下经验。 分析之后,应该是sphere.g2o中保存边的观测值(即位姿间的相对运动)应该是按照 T i − 1 T j T_i^{-1}T_j Ti−1Tj定义的,而不是按照 T i T j − 1 T_iT_j^{-1} TiTj−1定义,这样用此种方式定义的误差进行优化将得不到预期的结果。
还有一个问题就是左乘扰动和右乘扰动推导的雅克比矩阵不一样,用右乘扰动推导的雅克比矩阵优化,得不到预期的结果。这应该是位姿矩阵左乘和右乘不同导致的,一般SLAM里求的位姿指的都是相对于世界坐标系的绝对位姿,即左乘;而右乘是相对于动坐标系的位姿,可以理解为对前一帧图像的相对位姿。sphere.g2o中保存的顶点应该是相对于世界坐标系下的位姿。因此,如果图优化的顶点的是关键帧之间的相对位姿,则应该用右扰动模型求解的结果;如果顶点保存的是相对于固定坐标的位姿,则应该使用左扰动模型求解的结果。(没有在实际代码中验证过)
optimizing ...
iteration= 0 chi2= 15212918696.119320 time= 0.928117 cumTime= 0.928117 edges= 9799 schur= 0 lambda= 81.350858 levenbergIter= 1
iteration= 1 chi2= 11386678732.912115 time= 0.978504 cumTime= 1.90662 edges= 9799 schur= 0 lambda= 54.233905 levenbergIter= 1
iteration= 2 chi2= 5105775457.680527 time= 1.01027 cumTime= 2.91689 edges= 9799 schur= 0 lambda= 36.155937 levenbergIter= 1
iteration= 3 chi2= 3636537945.099213 time= 1.00972 cumTime= 3.92661 edges= 9799 schur= 0 lambda= 24.103958 levenbergIter= 1
iteration= 4 chi2= 675549387.141574 time= 0.992889 cumTime= 4.9195 edges= 9799 schur= 0 lambda= 16.069305 levenbergIter= 1
iteration= 5 chi2= 249002379.412620 time= 0.971525 cumTime= 5.89102 edges= 9799 schur= 0 lambda= 10.712870 levenbergIter= 1
iteration= 6 chi2= 147527240.236920 time= 1.00219 cumTime= 6.89322 edges= 9799 schur= 0 lambda= 7.141913 levenbergIter= 1
iteration= 7 chi2= 79441445.003757 time= 0.966643 cumTime= 7.85986 edges= 9799 schur= 0 lambda= 4.445619 levenbergIter= 1
iteration= 8 chi2= 65455378.789084 time= 1.00436 cumTime= 8.86422 edges= 9799 schur= 0 lambda= 1.906949 levenbergIter= 1
iteration= 9 chi2= 61760426.506496 time= 0.940925 cumTime= 9.80515 edges= 9799 schur= 0 lambda= 0.635650 levenbergIter= 1
iteration= 10 chi2= 59864696.972565 time= 1.00284 cumTime= 10.808 edges= 9799 schur= 0 lambda= 0.211883 levenbergIter= 1
iteration= 11 chi2= 59741695.565524 time= 1.00289 cumTime= 11.8109 edges= 9799 schur= 0 lambda= 0.141255 levenbergIter= 1
iteration= 12 chi2= 59624909.837083 time= 0.955693 cumTime= 12.7666 edges= 9799 schur= 0 lambda= 0.094170 levenbergIter= 1
iteration= 13 chi2= 57542133.582117 time= 1.9179 cumTime= 14.6845 edges= 9799 schur= 0 lambda= 0.125560 levenbergIter= 2
iteration= 14 chi2= 56043735.219484 time= 1.92567 cumTime= 16.6101 edges= 9799 schur= 0 lambda= 0.167052 levenbergIter= 2
iteration= 15 chi2= 55731974.147674 time= 1.00317 cumTime= 17.6133 edges= 9799 schur= 0 lambda= 0.111368 levenbergIter= 1
iteration= 16 chi2= 54104140.413337 time= 1.92121 cumTime= 19.5345 edges= 9799 schur= 0 lambda= 0.141591 levenbergIter= 2
iteration= 17 chi2= 53804036.461193 time= 1.00997 cumTime= 20.5445 edges= 9799 schur= 0 lambda= 0.094394 levenbergIter= 1
iteration= 18 chi2= 52174388.910775 time= 1.82121 cumTime= 22.3657 edges= 9799 schur= 0 lambda= 0.125859 levenbergIter= 2
iteration= 19 chi2= 51901913.851112 time= 1.01241 cumTime= 23.3781 edges= 9799 schur= 0 lambda= 0.083906 levenbergIter= 1
iteration= 20 chi2= 50389317.789719 time= 1.90794 cumTime= 25.286 edges= 9799 schur= 0 lambda= 0.111875 levenbergIter= 2
iteration= 21 chi2= 50188802.496751 time= 1.0043 cumTime= 26.2903 edges= 9799 schur= 0 lambda= 0.074583 levenbergIter= 1
iteration= 22 chi2= 49380588.813712 time= 0.940104 cumTime= 27.2304 edges= 9799 schur= 0 lambda= 0.049722 levenbergIter= 1
iteration= 23 chi2= 48552200.604526 time= 0.99819 cumTime= 28.2286 edges= 9799 schur= 0 lambda= 0.033148 levenbergIter= 1
iteration= 24 chi2= 48405897.723593 time= 1.00536 cumTime= 29.234 edges= 9799 schur= 0 lambda= 0.022099 levenbergIter= 1
iteration= 25 chi2= 48285647.351651 time= 1.01389 cumTime= 30.2479 edges= 9799 schur= 0 lambda= 0.014732 levenbergIter= 1
iteration= 26 chi2= 48144893.438943 time= 1.00391 cumTime= 31.2518 edges= 9799 schur= 0 lambda= 0.009822 levenbergIter= 1
iteration= 27 chi2= 48008186.430056 time= 0.851683 cumTime= 32.1035 edges= 9799 schur= 0 lambda= 0.006548 levenbergIter= 1
iteration= 28 chi2= 47901148.863662 time= 1.00447 cumTime= 33.1079 edges= 9799 schur= 0 lambda= 0.004365 levenbergIter= 1
iteration= 29 chi2= 47839926.122896 time= 1.00723 cumTime= 34.1152 edges= 9799 schur= 0 lambda= 0.001455 levenbergIter= 1
saving optimization results ...