我们在用STEP 7-MicroWIN SMART这个软件来对PLC控制步进/伺服电机运动(如绝对定位,相对定位,回原点)时,可以利用运动控制向导组态,通过对运动控制向导的设置,从而大大节省编程时间,降低编程难度
接下来都是重点,对新手的工控之路会很有帮助:
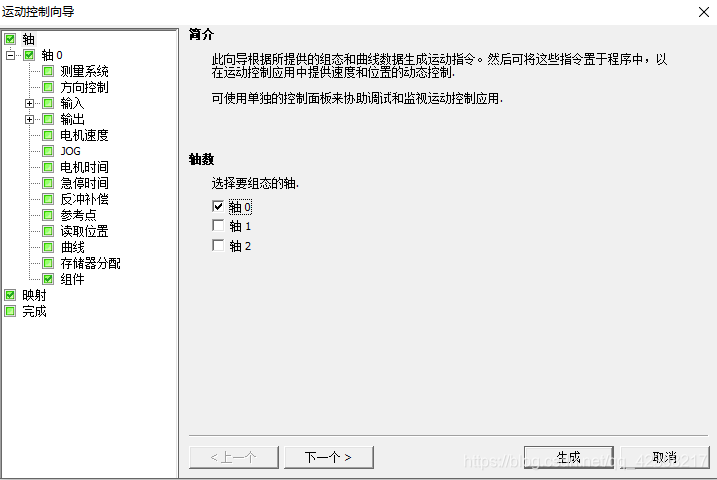
如上图所示,一般情况下,smart200只有2~3个输出脉冲接口(Q0.0,Q0.1和Q0.3),同时需配合相应的步进驱动器或者伺服驱动器以使电机正常的工作,对于向导的组态,大家可以根据自己的需求进行配置,都是很简单的数字量,有不懂的可以在下方留言,下面我着重介绍相应的组态模块。
①
使能块 (总控制块,用向导第一个一定要用这个模块),每个引脚的说明:
MOD_~和EN:使能端,两端可都接SM0.0;
Done:完成位,运动控制向导正确加载以后持续置1;
Error:故障字节,有故障显示故障代码,具体的故障代码可以查模块的资料;
C_Pos:填一个双字类型纯出去,存储电机走起来之后的当前位置;
C_Spe:填一个双字类型的存储区,存储当前速度;
C_Dir:是一个开关量,存储当前方向。
②
 手动控制模块,每个引脚的说明:
手动控制模块,每个引脚的说明:
EN:使能端;
RUN:按住手动运行;碰到系统组态中的停止位(限位器)会自动停止,再按不会有反应。
JOG_P:点动之正方向运行,摁住就一直走,点动的速度之前在向导分配好了,如下图所示;
JOG_N:点动之反方向运行;
Speed:手动运行的速度,单位为mm,但电机有一个加速匀速减速的过程,按照向导的加减速来走;
Dir:手动运行方向端,0或1,测试的时候可人为更改以验证正确性;
右边的引脚和上面的模块要保持一致,这个没什么问题吧~

③
在做回原点的运动时,需要按照:
输入—>RPS—>参考点—>查找、搜索顺序、偏移量的顺序组态向导,
RPS: 分配远点的输入点即原点在什么位置如I1.1等;
参考点:
Ⅰ 慢速查找浪费时间,快速查找惯性太大,设置一个适当的速度速度,一般是先快速再慢速;
Ⅱ PLC不知道电机在原点的左右,因此分配一个固定的方向,碰到限位传感器,再返回;
Ⅲ 传感器的感应宽度一般是1cm,停在中心原点的左右也是需要设置的;
Ⅳ 搜索顺序是系统自动回原点的方式如下图。
下来对回原点的子程序RSSK进一步说明:

EN:使能端,使能端一定需要使能;
START:有信号就开始回原点,一般配合|P|,有个脉冲就可以;
Done:完成位;
Error:故障位。
④GOTO指令是用的最多的指令,绝对相对运动模块
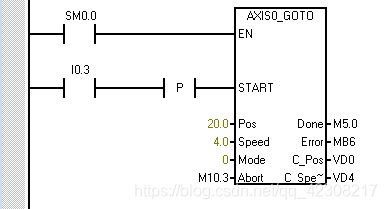
EN:使能端;
START:按钮接上升沿,执行运动,必须先用RSEEK函数定义回原点,要不然按住之后不起作用;
POS:位置,和下面的mode引脚有关;
Speed:以多少速度走;
Mode:
模式0:按照绝对位置来走,走到 Pos mm的位置,走一次,再摁就不动了;
模式1:按照相对位置走,无参考点,按一下走 Pos mm,按一下走一下
模式2:设定一个方向一直走一直走。正方向。
模式3:反方向
about:终止,导通后会终止脉冲发送;
剩下的引脚参考之前的即可。
⑤曲线运动现在运动向导曲线栏里添加曲线,之后点击曲线选择绝对/相对运动并设置 以目标速度走到终止位置。

EN:使能端;
START:按钮接上升沿,执行运动,必须先用RSEEK函数定义回原点,要不然按住之后不起作用;
Profile:行走的包络,直接写汉字或数字,曲线(几);
about:终止,导通后会终止脉冲发送;
右边的同上,但有几个特殊说明:
C_Profile:是个字节,表示当前包络;
C_Step:是个字节,表示当前步(曲线的第几步);