需求:1- 使用PLC发送脉冲控制伺服驱动器,驱动伺服电机,带动与齿轮带连接的伸缩杆定位;
要求:1- 位置可调;2- 速度可调; 3- 显示位置、速度状态;4- 断电位置保持。
一、资料查看
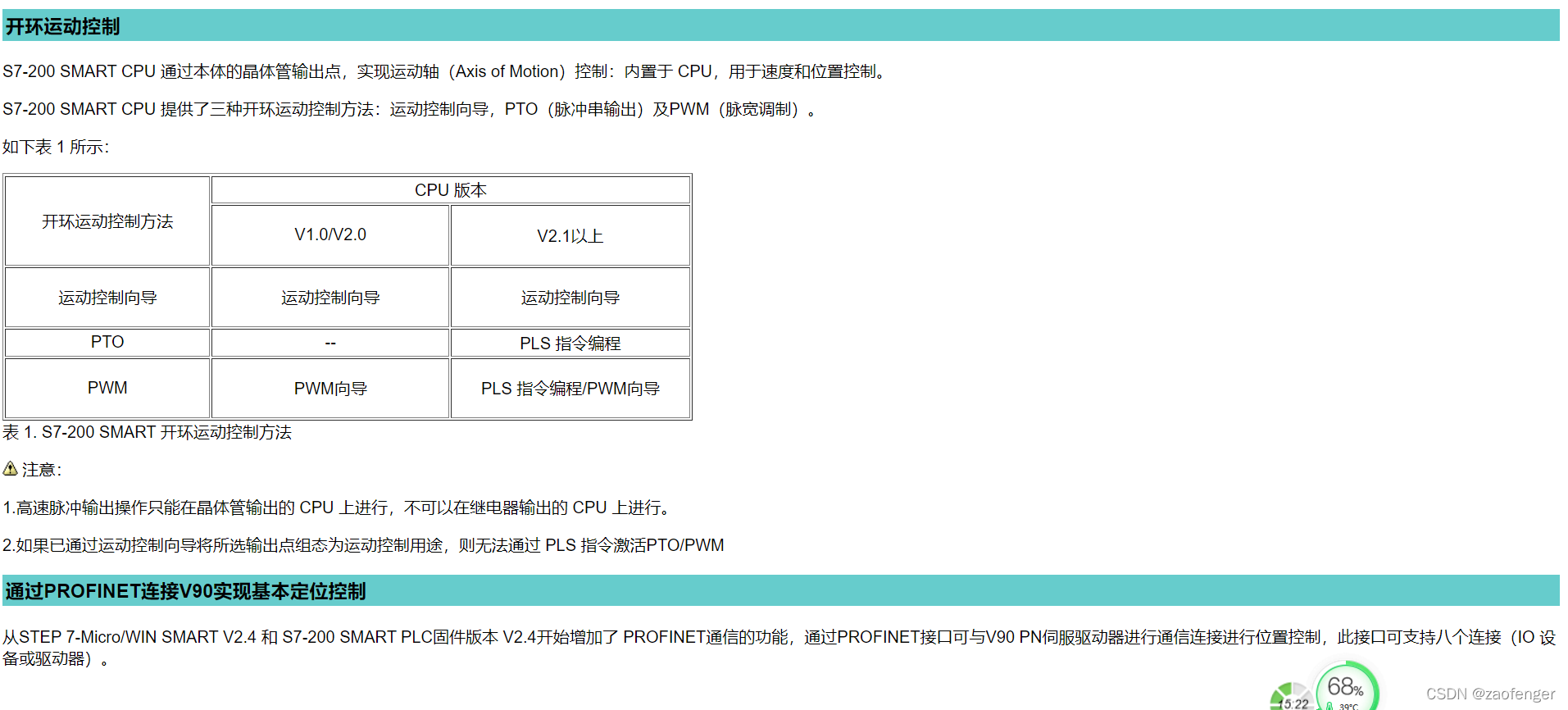
1- S7-200 SMART CPU 提供了三种开环运动控制方法:运动控制向导,PTO(脉冲串输出)及PWM(脉宽调制);通过PROFINET连接V90实现基本定位控制从STEP 7-Micro/WIN SMART V2.4 和 S7-200 SMART PLC固件版本 V2.4开始增加了 PROFINET通信的功能,通过PROFINET接口可与V90 PN伺服驱动器进行通信连接进行位置控制,此接口可支持八个连接(IO 设备或驱动器)。
2- 注意事项:
2-1 200smart 的PTO方式,pls指令,
使用方式:(1)配置控制字;(2)设置脉冲频率/脉冲数;(3)触发脉冲指令。
注意事项:200smart pls指令没有当前位置\频率实时状态字,需要通过外部硬件输入端的高速脉冲计数来测量。
二、方式选择
1- 使用运动控制向导的方式,该方式不使用外部硬件可以记录发送的脉冲、频率数据。
三、运动控制向导的使用
0- 组态指令;
1- 相对位置指令;
2- 绝对位置指令;
3- 手动指令;
4- 零点指令。
基本使用结构:
1- 加载组态;
2- 根据需要触发动作指令。