5.1PWM 概述
4412时钟为我们提供了PWM定时器,在4412中共有5个32位的定时器,这些定时器可发送中断信号给ARM子系统。另外,定时器0、1、2、3包含了脉冲宽度调制(PWM),并可驱动其拓展的I/O。PWM对定时器0有可选的dead-zone功能,以支持大电流设备。要注意的是定时器4是内置不接外部引脚的。一般用于定时器功能。
定时器0与定时器1共用一个8位预分频器,定时器2、定时器3与定时器4共用一另一个8位预分频器,每个定时器都有一个时钟分频器,时钟分频器有5种分频输出(1/2、1/4、 1/8 、1/16和外部时钟TCLK)。另外,定时器可选择时钟源,定时器0-4都可以选择外部的时钟源,如PWM_TCLK。
当时钟被使能后,定时器计数缓冲寄存器(TCNTBn)把计数器初始值下载到递减计数器中。定时器比较缓冲寄存器(TCMPBn)把其初始值下载到比较寄存器中,并将该值与递减计数器的值进行比较。当递减计数器和比较寄存器值相同时,输出电平翻转。递减计数器减至0后,输出电平再次翻转,完成一个输出周期。这种基于TCNTBn和TCMPBn的双缓冲特性使定时器在频率和占空比变化时能产生稳定的输出。
每个定时器都有一个专用的由定时器时钟驱动的16位递减计数器。当递减计数器的计数值达到0时,就会产生定时器中断请求来通知CPU定时器操作完成。当定时器递减计数器达到0的时候,如果设置了Auto-Reload 功能,相应的TCNTBn的值会自动重载到递减计数器中以继续下次操作。然而,如果定时器停止了,比如在定时器运行时清除TCON中定时器使能位,TCNTBn的值不会被重载到递减计数器中。
TCMPBn 的值用于脉冲宽度调制(PWM)。当定时器的递减计数器的值和比较寄存器的值相匹配的时候,定时器控制逻辑将改变输出电平。因此,比较寄存器决定了PWM 输出的开关时间。
PWM定时器的特点如下:
5个32位定时器;
2个8位PCLK分频器提供一级预分,5个2级分频器用来预分外部时钟;
可编程选择PWM独立通道。
4个独立的可编程的控制及支持校验的PWM通道。
静态配置:PWM停止;
动态配置:PWM启动;
支持自动重装模式及触发脉冲模式;
一个外部启动引脚。
两个PWM输出可带Dead-Zone 发生器。
中断发生器。

5.2相关寄存器
5.2.1定时器配置寄存器0(TCFG0)

Timer Input Clock Frequency = PCLK/({prescaler value + 1})/{divider value}
{prescaler value} = 1 to 255
{divider value} = 1, 2, 4, 8, 16
Dead zone length = 0 to 254
NOTE: If deadzone length is set as “n”, real Dead Zone length is “n + 1” (n = 0 to 254)
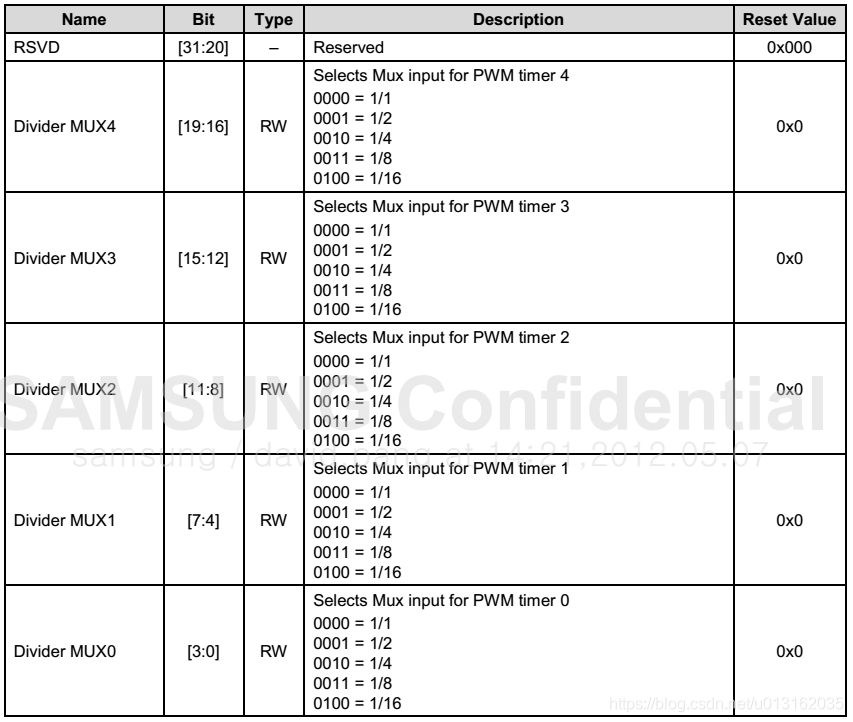
5.2.2定时器配置寄存器1(TCFG1)
主要用于PWM定时器的MUX输入。
5.2.3 TCNTB0

5.2.4 TCMPB0

5.2.5 TCNTO0

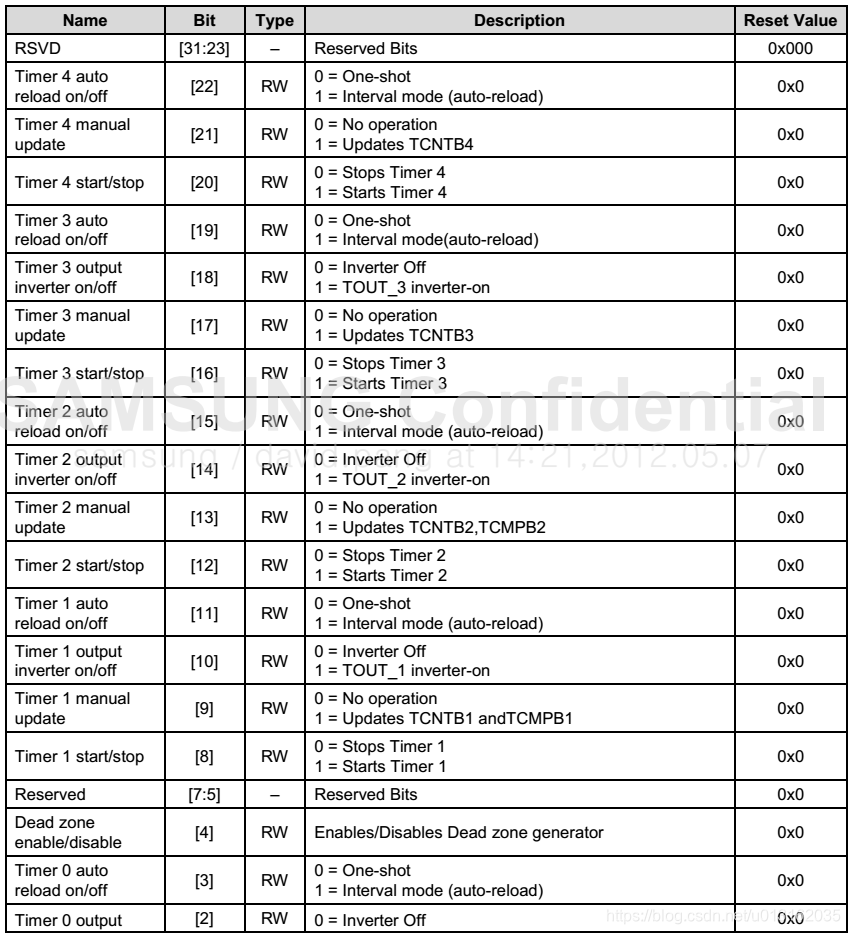
5.2.6 TCON

5.3 PWM程序设计
4412的PWM定时器具有双缓冲功能,能在不停止当前定时器运行的情况下,重载定时器下次运行的参数。所以尽管新的定时器的值被设置好了,但是当前操作仍能成功完成。
定时器的值可以被写入定时器n 计数缓冲寄存器(TCNTBn),当前的计数器的值可以从定时器计数观察寄存器(TCNTOn)读出。读出的TCNTBn值并不是当前的计数值,而是下次将重载的计数值。
TCNTn的值等于0的时候,自动重载操作把TCNTBn的值装入TCNTn,只有当自动重载功能被使能并且TCNTn 的值等于0的时候才会自动重载。如果TCNTn等于0,自动重载控制位为0,则定时器停止运行。
使用手动更新位(Manual Update)和反转位(Inverter)完成定时器的初始化。当递减计数器的值达到0的时候会发生定时器自动重载操作,所以TCNTn的初始值必须由用户提前定义好,在这种情况下就需要手动更新位重载初始值。一下几个步骤给出如何启动定时器。
1)向TCNTBn 和 TCMPBn写入初始值。
2)置位相应定时器的手动更新为,不管是否使用翻转功能,推荐设置反转位。
3)置位相应定时器的启动位启动定时器,清除手动更新位。
如果定时器被强制停止,TCNTn保持原来的值而不是TCNTBn的重载值。如果要设置一个新的值,必须执行手动更新操作。
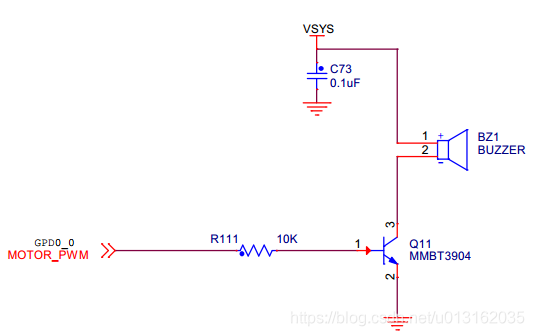
该开发板的蜂鸣器是无源蜂鸣器,所有我们不能用该端口输出高低电平来控制蜂鸣器的播放,必须要使用PWM定时器来控制。
头文件定义
typedef struct {
unsigned int TCFG0;
unsigned int TCFG1;
unsigned int TCON;
unsigned int TCNTB0;
unsigned int TCMPB0;
unsigned int TCNTO0;
unsigned int TCNTB1;
unsigned int TCMPB1;
unsigned int TCNTO1;
unsigned int TCNTB2;
unsigned int TCMPB2;
unsigned int TCNTO2;
unsigned int TCNTB3;
unsigned int TCMPB3;
unsigned int TCNTO3;
unsigned int TCNTB4;
unsigned int TCNTO4;
unsigned int TINT_CSTAT;
}pwm;
#define PWM (* (volatile pwm *)0x139D0000)
控制部分
void pwm_init(void)
{
GPD0.CON = GPD0.CON & (~(0xf))| 0x2;
GPD0.PUD = GPD0.PUD & (~(0xf)) ;
PWM.TCFG0 = PWM.TCFG0 & (~(0xff))|0xf9;
PWM.TCFG1 = PWM.TCFG1 & (~(0xf)) | 0x2;
PWM.TCMPB0 = 50;
PWM.TCNTB0 = 100;
PWM.TCON = PWM.TCON & (~(0xff)) | (1 << 0) | (1 << 1) ;
//第一次要手动设置
}
void beep_on(void)
{
PWM.TCON = PWM.TCON & (~(0xff)) | (1 << 0) | (1 << 3) ;
}
void beep_off(void)
{
PWM.TCON = PWM.TCON & (~(1 << 0)) ;
}
完整程序清参考附件。