文章目录
A 频率特性的定义及几何表示方式
引言
频率法研究的问题仍然是自动控制系统控制过程的性能,即稳定性、快速性、 稳态精度。
频率法研究系统的依据是系统的频率特性,它是另一种控制系统的数学模型, 与传递函数有着确切的关系。
频率特性具有明确的物理意义,稳定的系统可以通过实验的方法获得其频率特 性,这是频率法的优点。
频率法不仅适用于线性定常系统,也可以推广应用于某些非线性系统。
频率法研究的问题仍然是自动控制系统控制过程的性能,即稳定性、快速性、 稳态精度。
频率法研究系统的依据是系统的频率特性,它是另一种控制系统的数学模型, 与传递函数有着确切的关系。
频率特性具有明确的物理意义,稳定的系统可以通过实验的方法获得其频率特 性,这是频率法的优点。
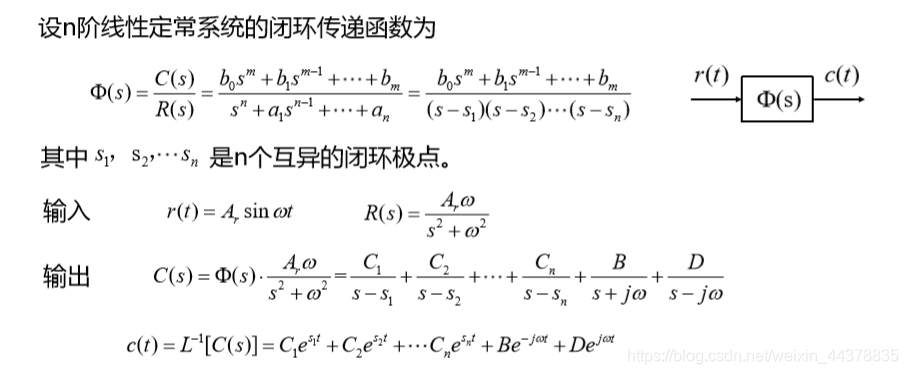
控制系统在正弦输入信号作用下的稳态输出
设n阶线性定常系统的闭环传递函数为:
频率特性的定义
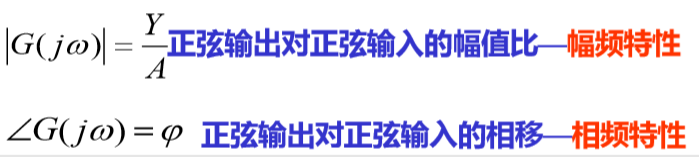
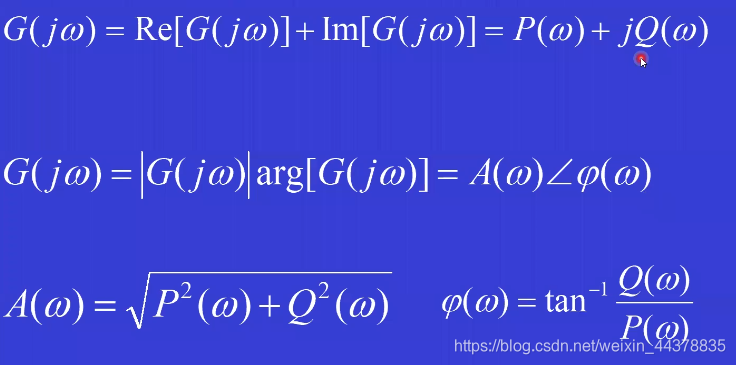
一个稳定的线性定常系统,在正弦信号作用下,进入稳态后,其输出是与输入同频率的正弦信号,将稳态输出的幅值与输入幅值的比值定义为幅频特性,用
表示,即

将系统稳态输出与输入的相位差,定义为相频特性,用
表示,即

以上定义的幅频特性和相频特性统称为系统的频率特性,记为

对于正弦输入:

若将输入和稳态输出分别用复数形式表示为
和
,则稳态输出与 输入的复数比为

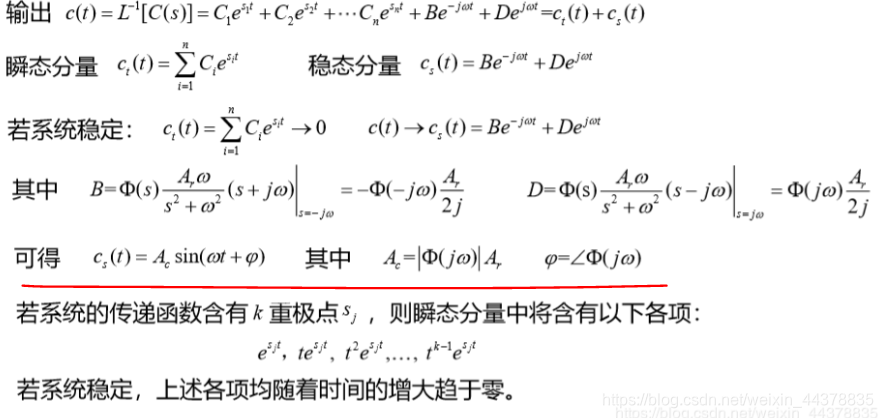
线性定常系统的频率特性可以定义为,在正弦信号作用下,系统输出的稳 态分量与输入的复数比。
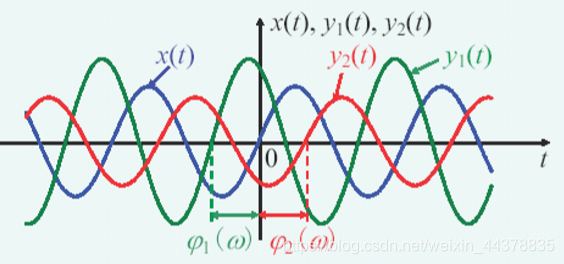
线性定常系统对正弦输入信号
的稳态输出仍然是一个正弦信号,其特点是:
- 频率与输入信号相同;
- 振幅 为输入振幅 的的 倍。
- 相移为:
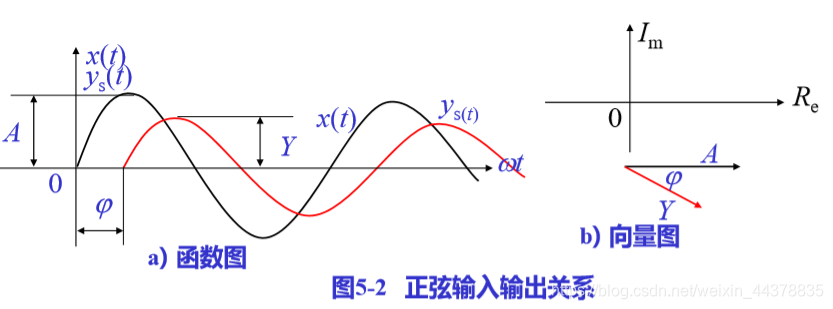
输入、输出关系也可以用函数图和向量图表示如下:
以下内容中
为
,
为
,
:
频率特性与传递函数之间有着确切的简单的关系,即

这就是说,
是在
特定情况下的传递函数. 通过它来描述系统的性能,与用传递函数描述时具有 同样的效果,即两者所包含的系统动态特性的信息完 全相同。
频率特性表征了系统或元件对不同频率正弦 输入的响应特性。
根据控制系统对于正弦谐波函数这类典型信号的响应,可推出它在任意周期或非周期信号作用下的运动情况。
关于频率特性的几点说明:
1、频率特性不只是对系统而言,其概念对控制元件、部件和控制装置均适用;
2、频率特性只适用于线性定常系统
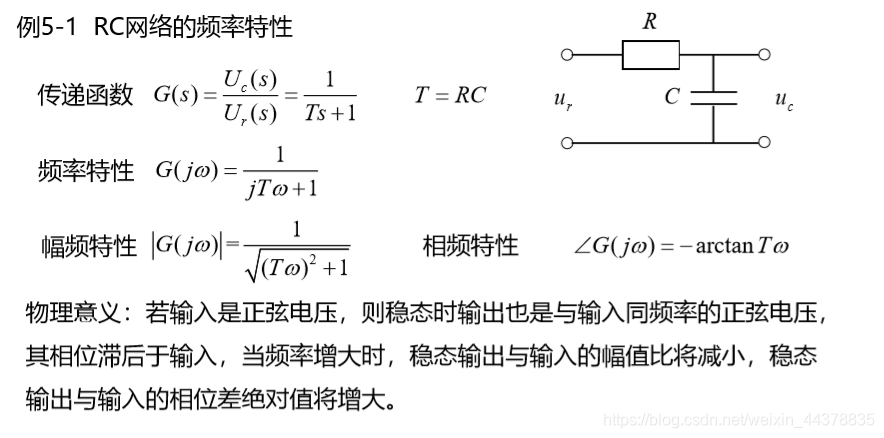
3、若系统不稳定,则系统的输出不会趋于稳态分量,也无法由实际输出直接观察到 稳态分量,但从理论上讲,其输出的稳态分量总可以分离出来,且其规律性并不依赖 于系统的稳定性。所以可以扩展频率特性的概念,将频率特性定义为,当输入为正弦 信号时,线性定常系统模型输出的稳态分量与输入的复数比。
4、由频率特性的表达式可知,其包含了系统或元部件的全部结构和参数。所以尽管 频率特性是一种稳态响应,但动态过程的规律性也寓于其中。频率特性与微分方程和 传递函数一样,也是系统或元部件的动态数学模型。
频率特性的数学表示及作图
1 频率特性的数学表示
2.幅频特性曲线、相频特性曲线和幅相特性曲线
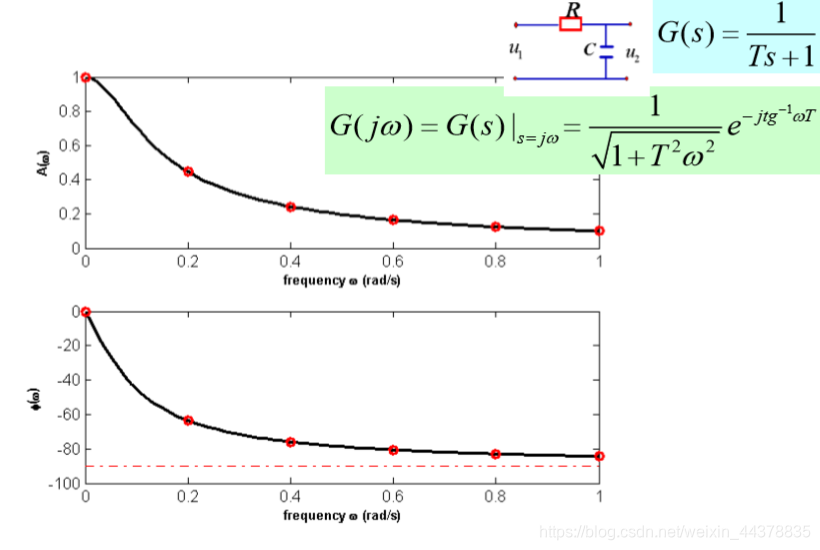
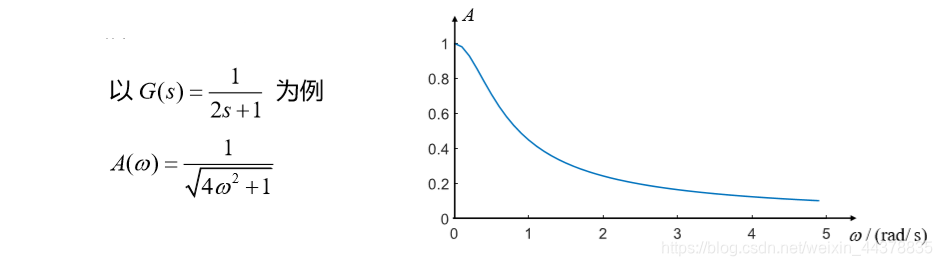
(1)幅频特性曲线
以频率 w为横坐标,以幅频 A(w)为纵坐标,画出
随频率 w变化的曲线, 称为幅频特性曲线。
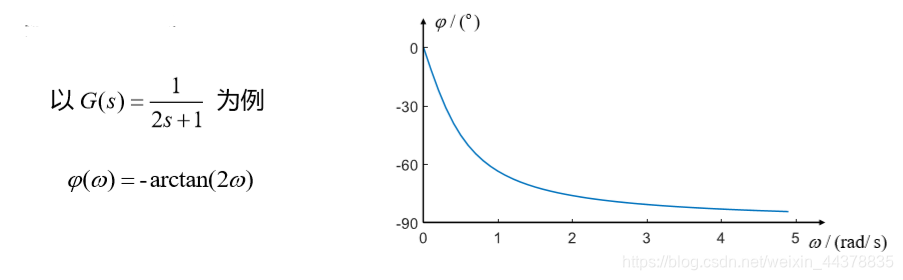
(2)相频特性曲线
以频率w为横坐标,以相频
为纵坐标,画出 随频率 变化的曲线, 称为相频特性曲线。
(3)幅相频特性曲线
以频率w为参变量,根据幅频和相频的值在复数平面上确定一个矢量,实轴正方 向为相角的零度线,逆时针方向转过的角度为正角度。当频率变化时,该向量的端点 在复数平面上移动的轨迹,称为极坐标图,幅相特性曲线,或奈奎斯特(Nyquist)曲线 。
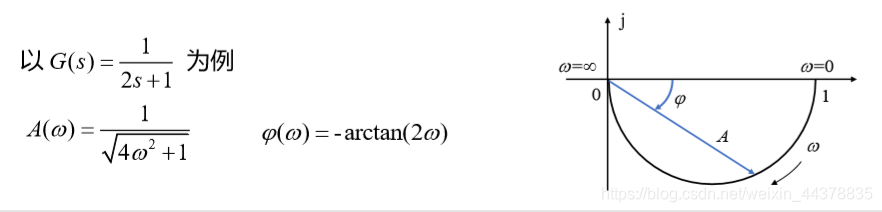
也就是说取一个
之后,有对应的模值和相角,根据这个可以确定一个矢量。
特点:曲线实轴对称;
为隐变量;不便于徒手绘图;展示不清晰。
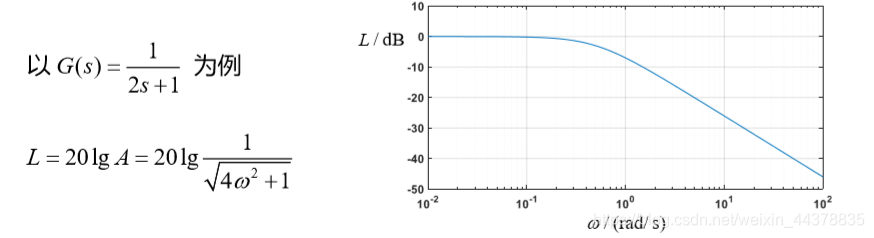
2.对数频率特性
对数频率特性曲线又称波特(Bode)图,包括对数幅频与对数相频特性曲线
(1)对数幅频曲线图以
为纵坐标,单位:分贝(dB)
横坐标是角频率
,单位:弧度/秒, 按
刻度,标注的是
的值
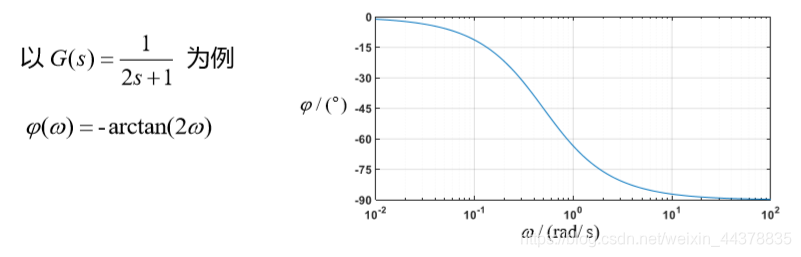
(2)对数相频曲线图以相频
为纵坐标,单位:度或弧度;
横坐标是角频率
,单位:弧度/秒, 按
刻度,标注的是
的值。
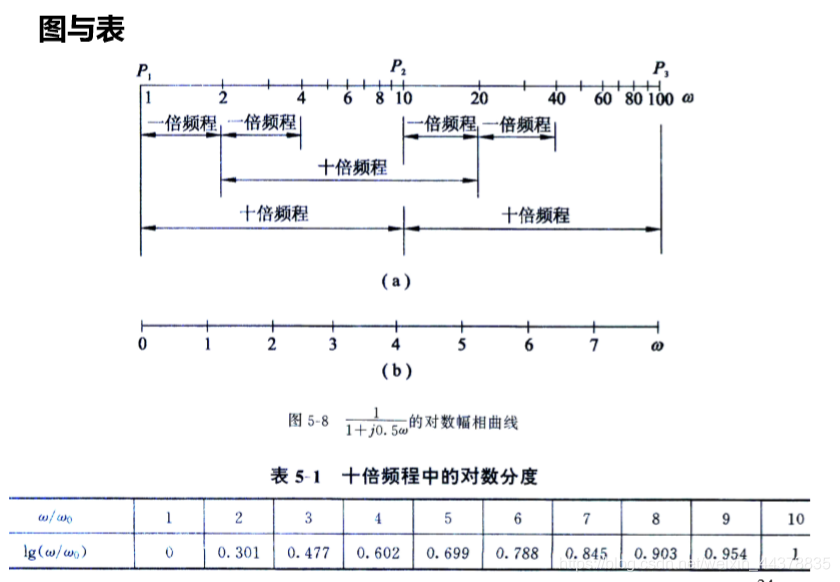
波特图的优点:
- 可以展宽频带
- 可以采用折线作图
- 可以
叠加作图。
按照十倍频变化。
B 典型环节的频率特性
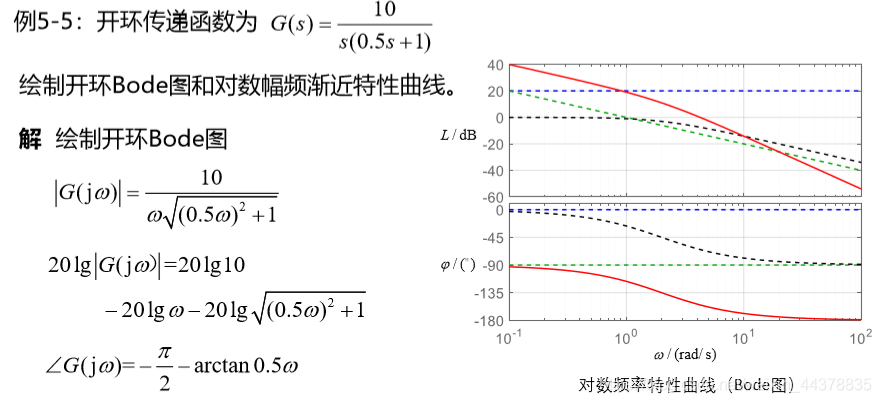
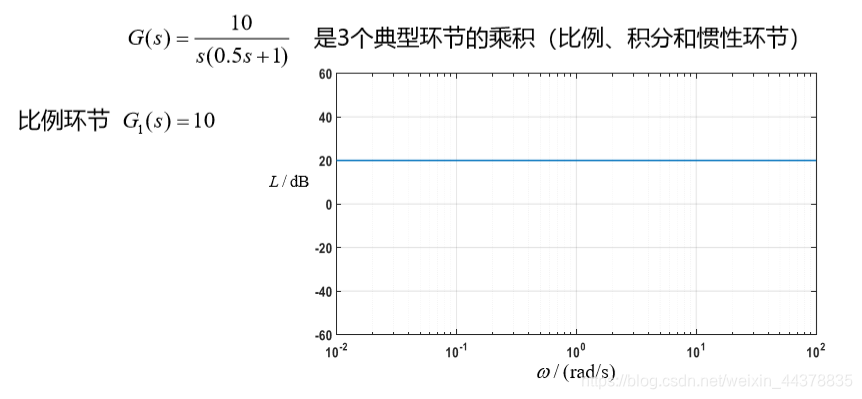
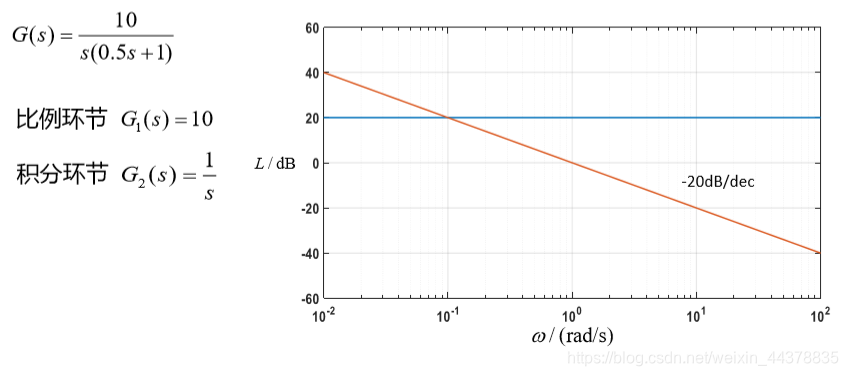
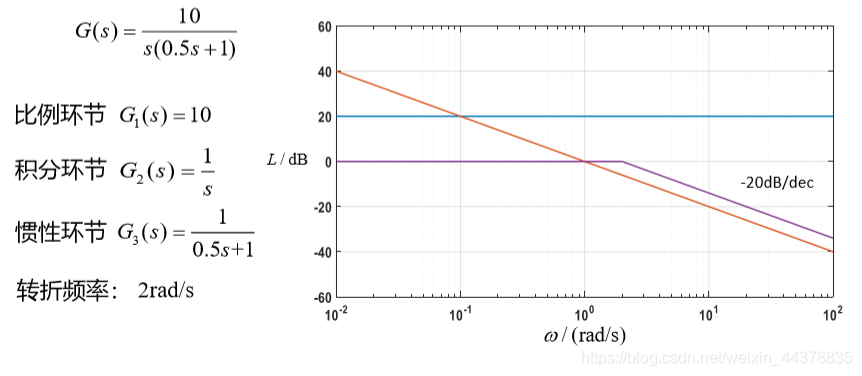
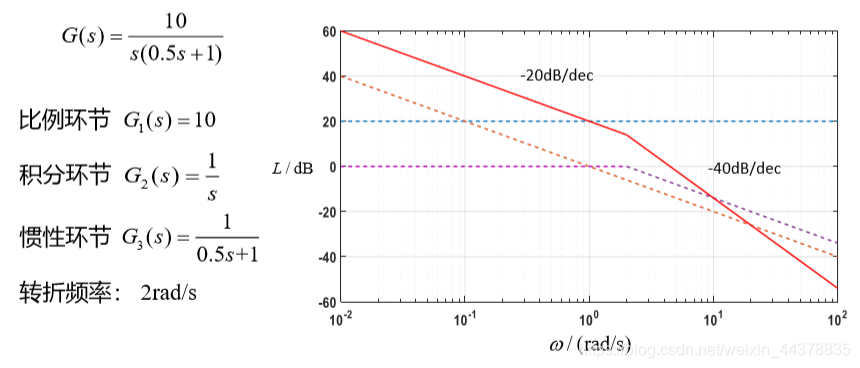
用频率法研究控制系统的稳定性和动态响应,是根据系统的开环频率特性进行 的,而控制系统的开环频率特性通常是由若干个典型环节的频率特性组成的,如直 流电机的传递函数为

可以将该传递函数分解为三个典型环节的乘积,分别是

掌握好典型环节的频率特性,就能方便地得出系统的开环频率特性。
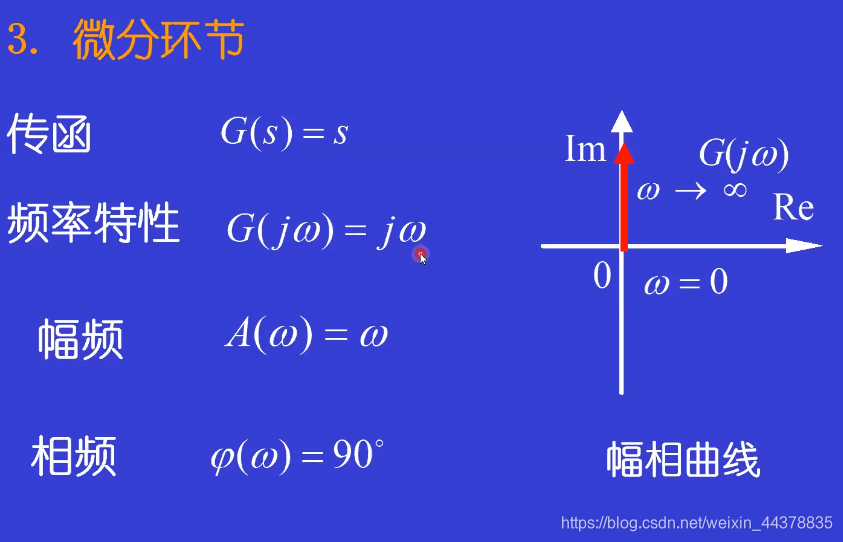
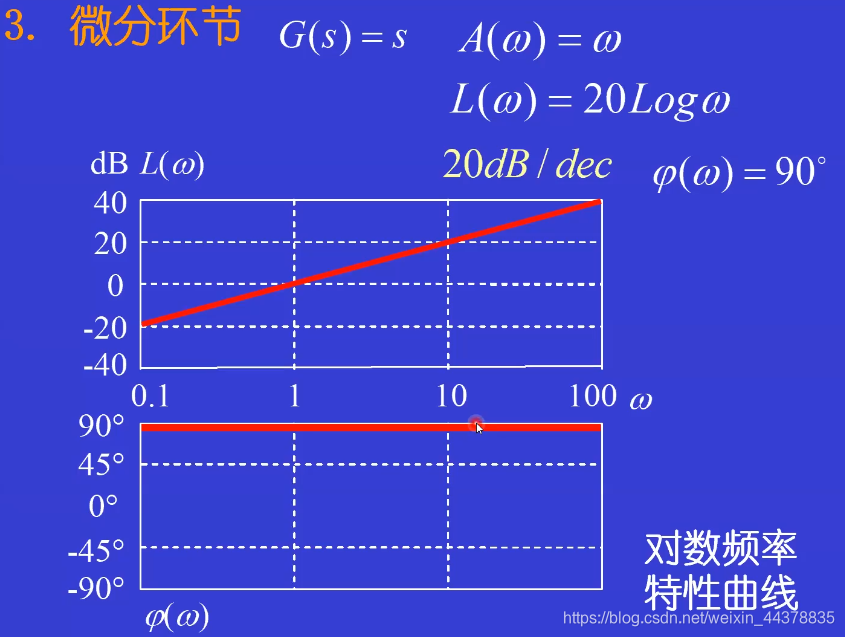
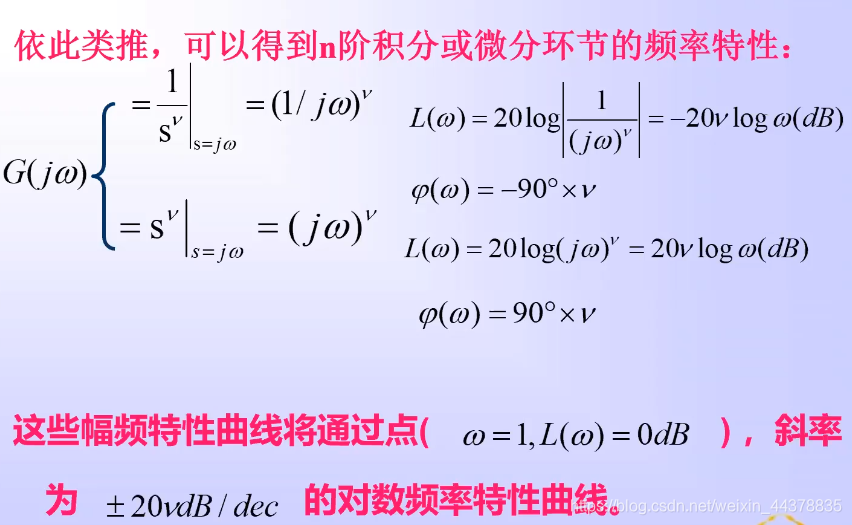
典型环节的频率特性
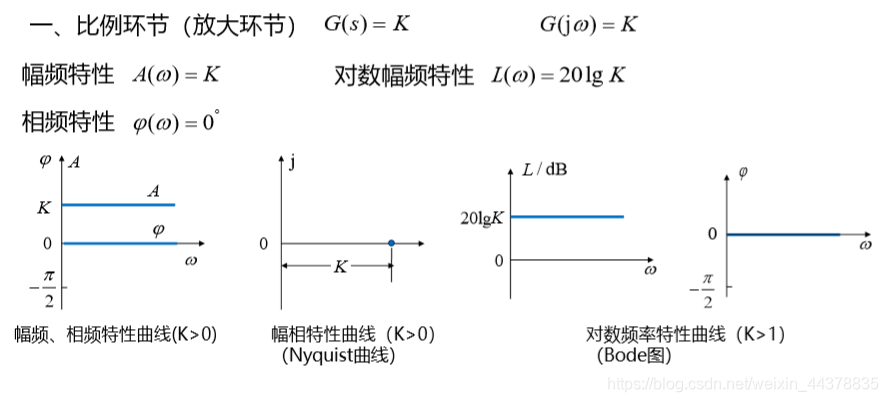 |
1:0°;j:90°,1/j:0-90 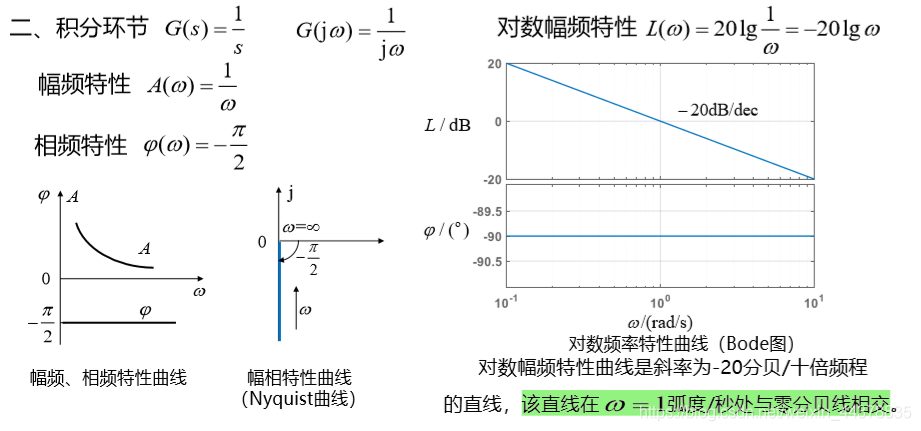 |
 |
 |
 |
 |
 |
 |
 |
|
 |
 |
 |
|
 |
 |
 |
 |
 |
 |
 |
 |
C 系统的开环频率特性(Nyquist曲线)
系统的开环频率特性
设系统的开环传递函数是n个典型环节的传递函数的乘积,即

则开环频率特性为

设第i个典型环节的幅频特性和相频特性为

则开环幅频特性和相频特性为(叠加)

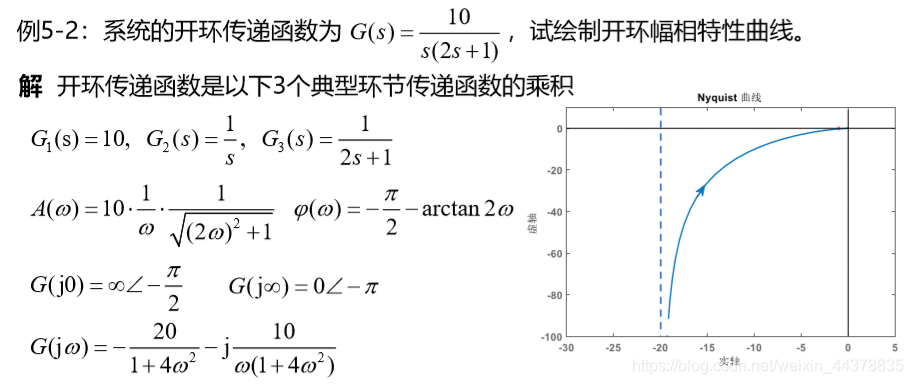
开环幅相特性曲线的绘制:
开环幅相特性曲线的绘制(含一个积分环节的情形):
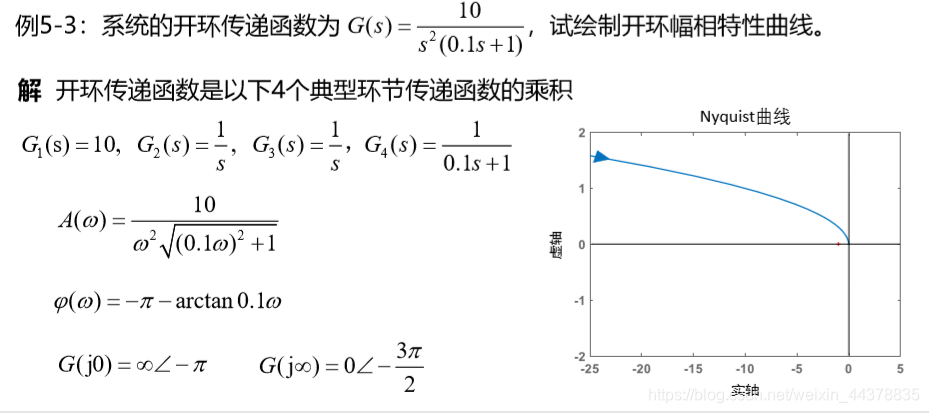
开环幅相特性曲线的绘制(含两个积分环节的情形):
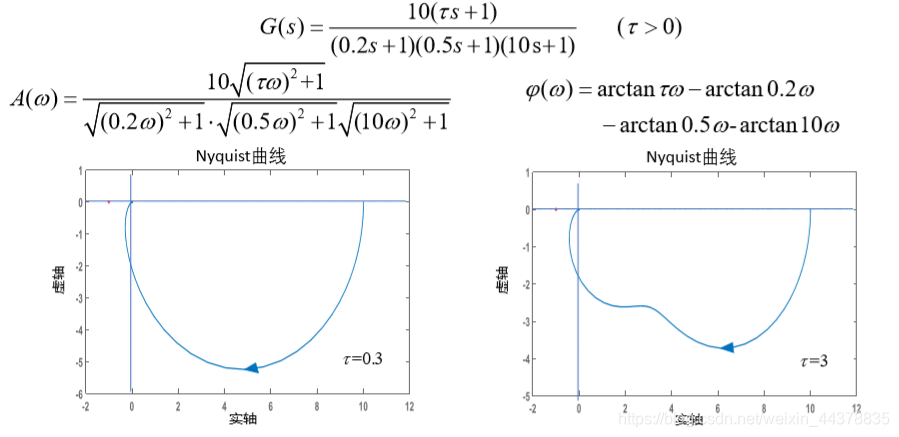
开环幅相特性曲线的绘制(分子含有s因式的情形)
 |
 |
系统开环幅相特性曲线的特点(最小相位系统)
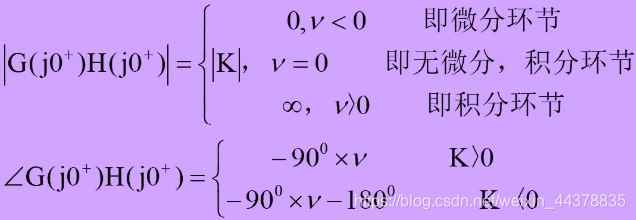
(1)当频率
时,其开环幅相特性完全由比例环节和积分环节决定。当开环 传递函数
不含积分环节时
其中
为开环增益,福相特性曲线从正实轴开始。若含有1个积分环节,则
幅相特性曲线从负虚轴方向开始。
若含有2个积分环节,则
,幅相特性曲线从负实轴开始。
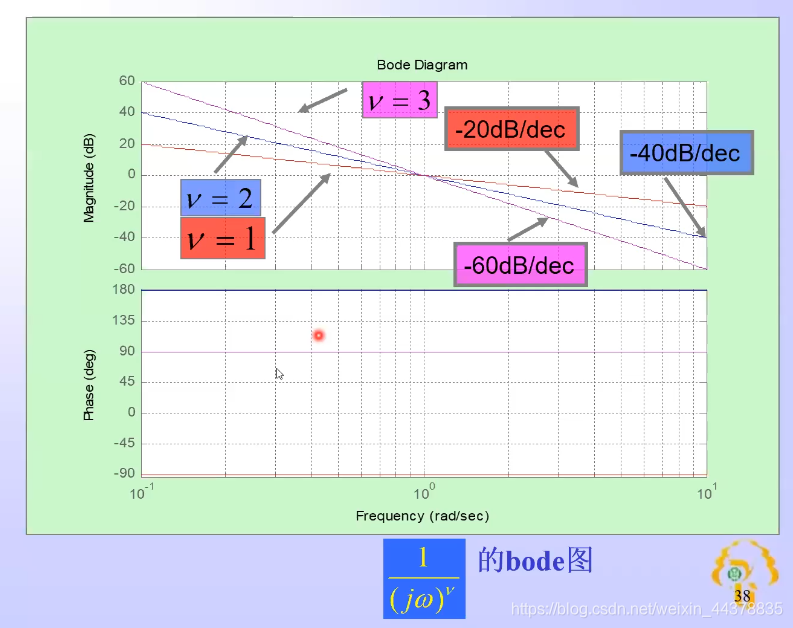
以此类推,若含有v个积分环节,则
(2)若开环传递函数的分子中含有s的因式,其幅相特性曲线可能是一条有凹凸 的曲线,若分子中不含s的因式,则幅相特性曲线将是一条平滑的、不出现凹凸的 曲线;
(3)当频率
趋于正无穷大时,若
(n和m分别是
中分母和分子多项式 的次数),则幅值为零,相位为

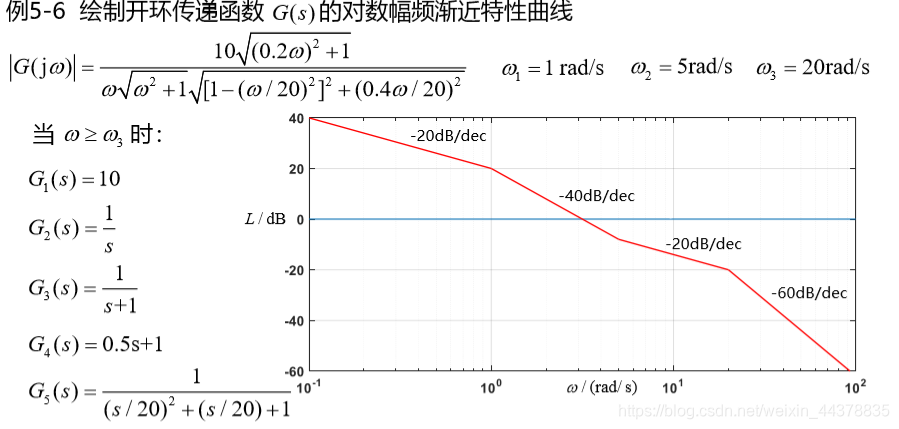
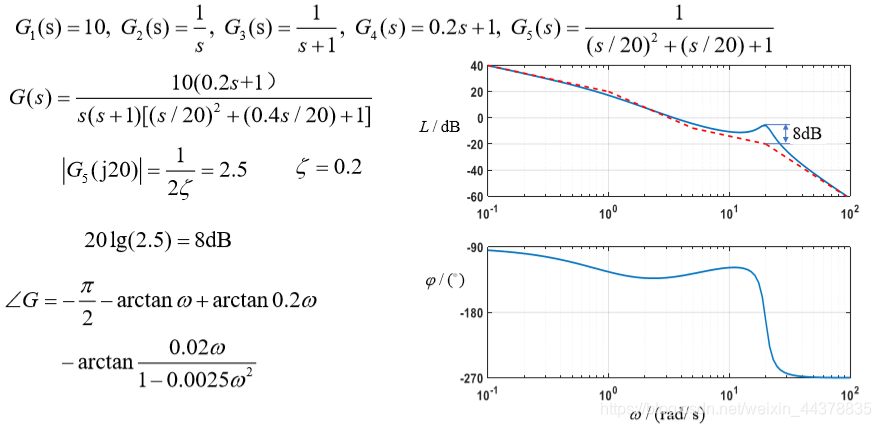
D 系统的开环频率特性(Bode图)
系统的开环对数频率特性
设系统的开环传递函数是n个典型环节的传递函数的乘积,即

则开环频率特性为

设第i个典型环节的幅频特性和相频特性为

则开环对数幅频特性和相频特性为

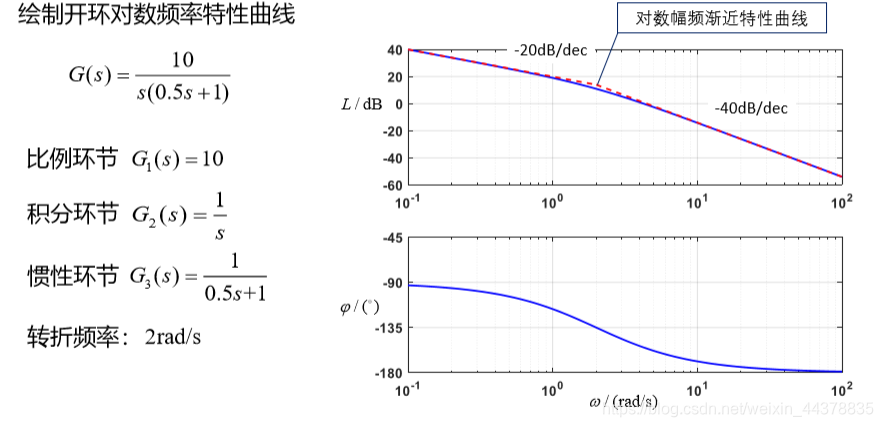
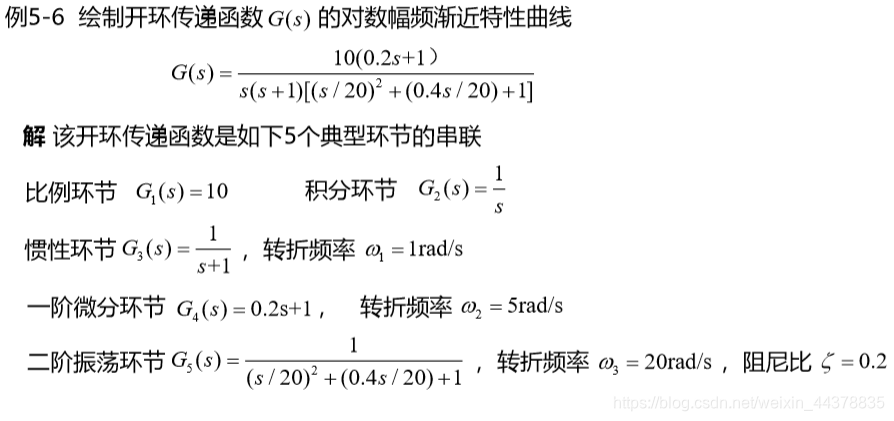
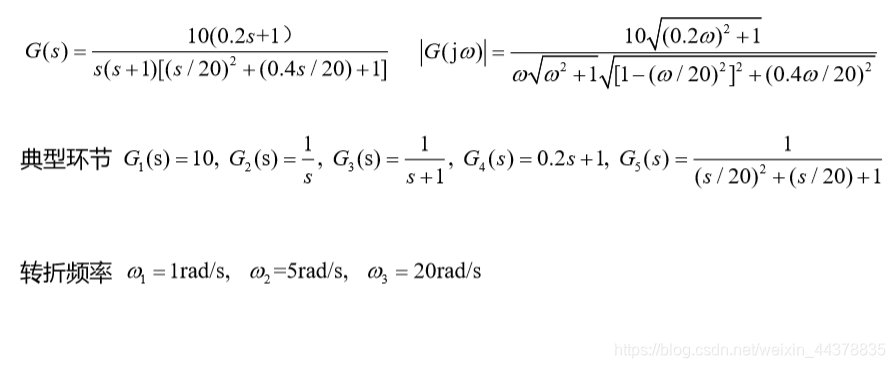
在绘制系统Bode图时,应先将系统传递函数 分解为典型环节乘积的形式,再逐步绘制。
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
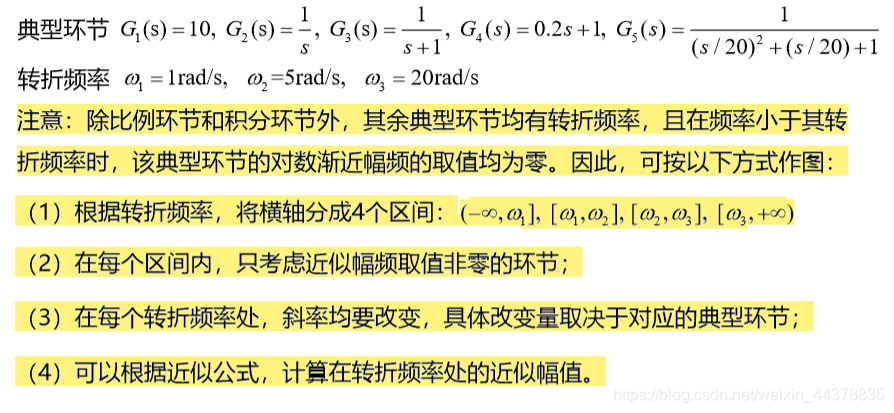
开环对数频率特性曲线的特点(最小相位系统):
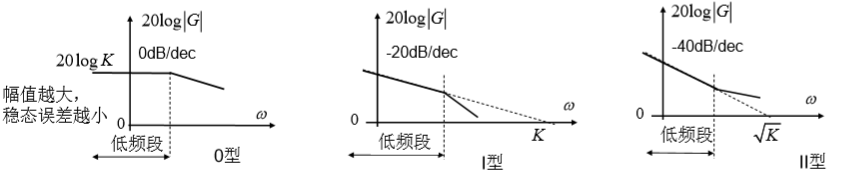
(1)低频段(频率小于最小转折频率时)对数幅频渐近特性曲线的斜率由积分环 节个数
决定。若为零型系统(无积分环节),则斜率为
,若为 I 型系统(一个积分环节),斜率为
,若为 II 型系统(两个积分环节),斜率为
, 其余以此类推;
(2)低频段的对数幅频渐近特性曲线(或其延长线)与零分贝线相交处的频率为
,其中
为开环增益,
为积分环节个数;
(3)当频率趋于零时,对数相频特性曲线从
开始,当频率趋于正无穷大时, 相频特性曲线趋于
,其中n和m分别为开环传递函数分母和分子多项式的 次数 ;
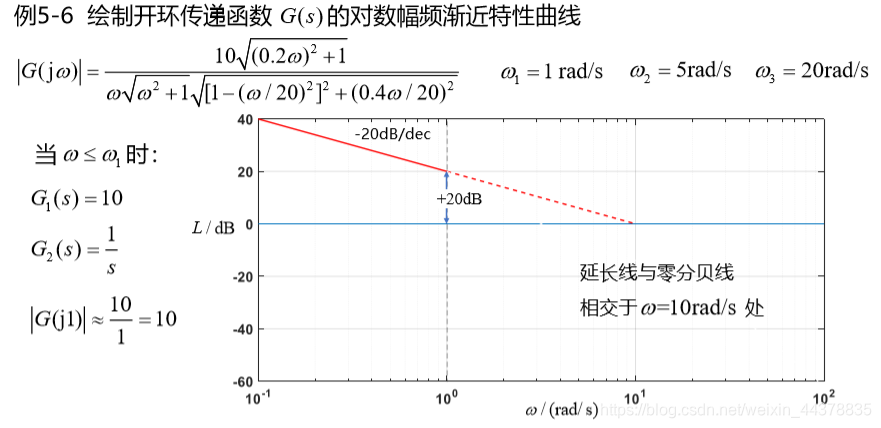
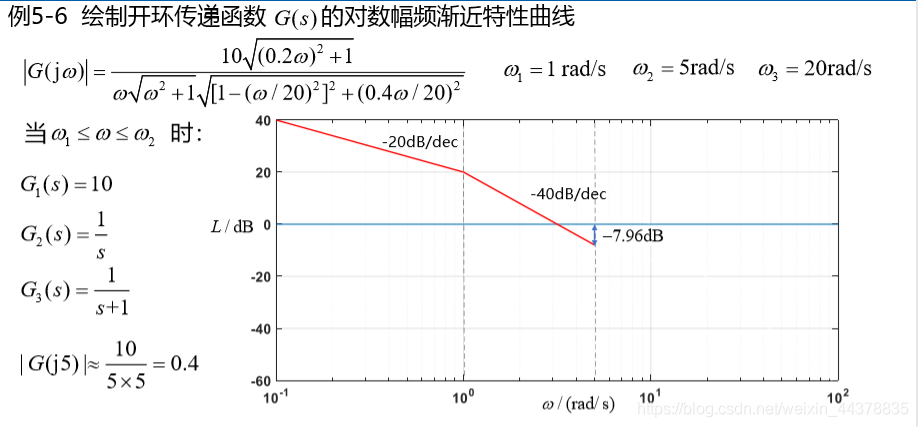
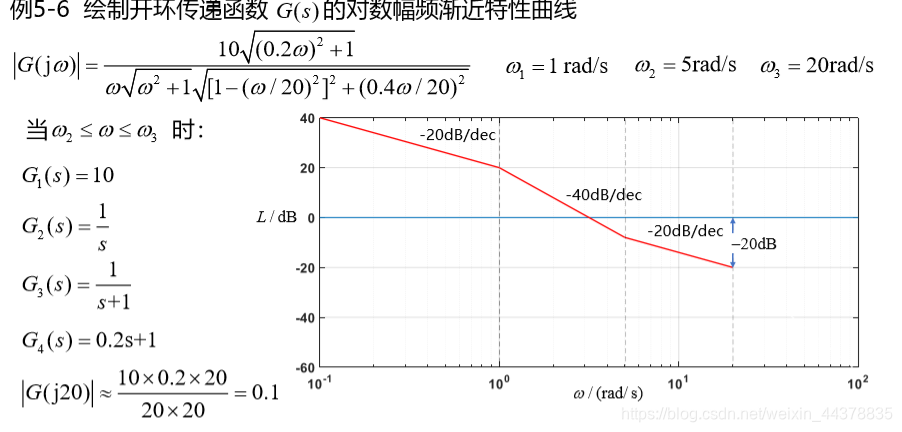
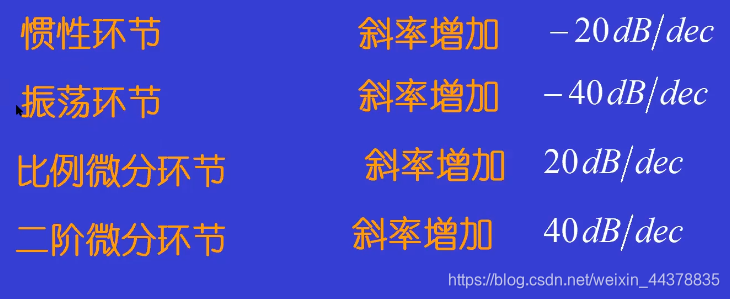
(4)对数幅频渐近特性曲线由不同斜率的直线段组成,从低频到高频,每经过 一个转折频率,其斜率均要发生变化,变化量或是
(一阶微分环节) ,或是
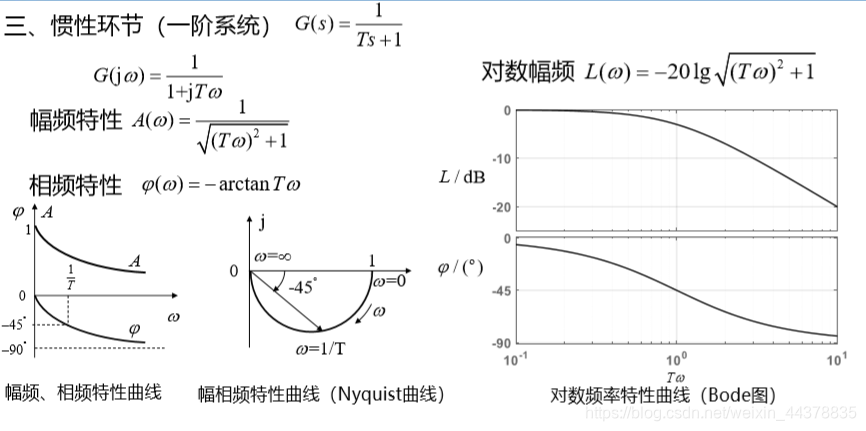
(惯性环节) , 或是
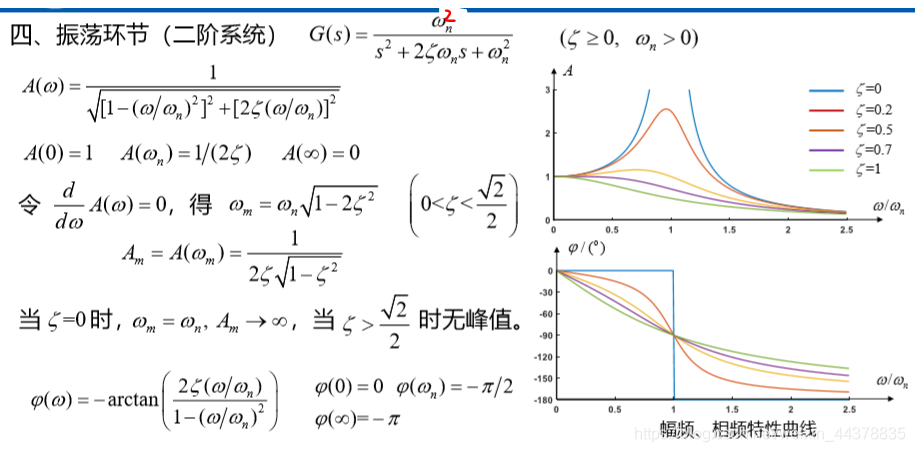
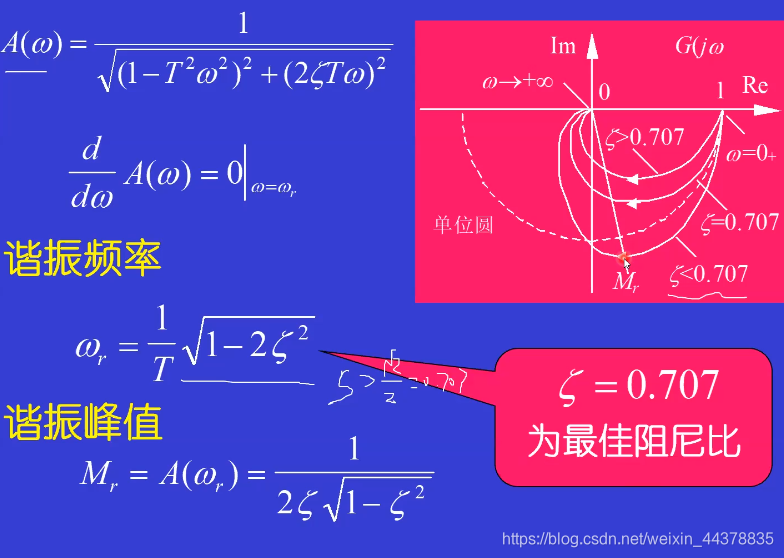
,或是
(二阶振荡环节) ,具体取决于该转折频率对应的典型环节;
(5)当频率趋于正无穷大时,对数幅频渐近特性曲线的斜率为
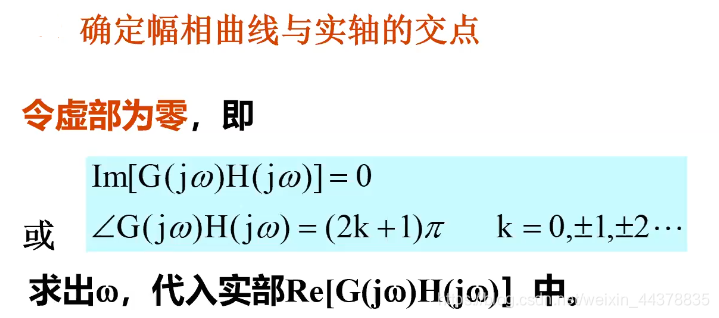
反过来可以求与虚部的交点。
E 频率稳定判据(1)
两种频率稳定判据:奈奎斯特(Nyquist)稳定判据和对数频率稳定判据。
奈奎斯特判据是利用系统的开环幅相特性曲线判断闭环系统稳定性的一种方 法,而对数频率稳定判据是利用系统的开环对数频率特性判断闭环系统的稳定 性,两种方法本质上没有区别。
频率稳定判据是建立在幅角原理的基础上的,因此,下面先介绍有关幅角原理的内容。
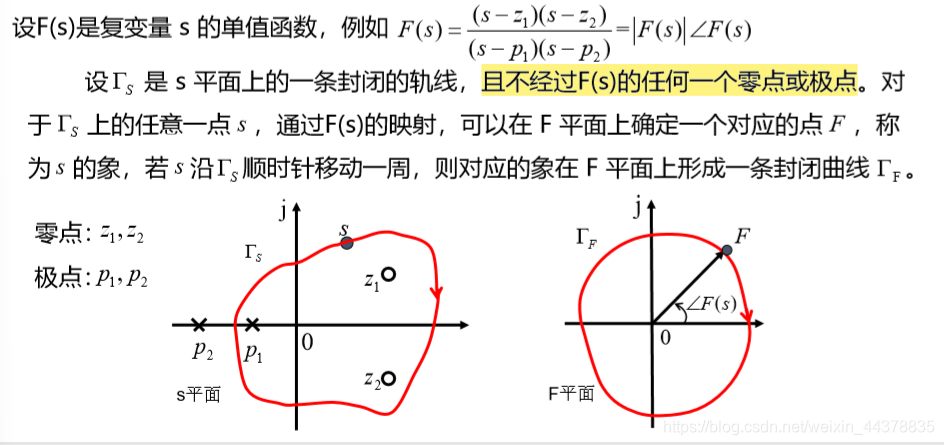
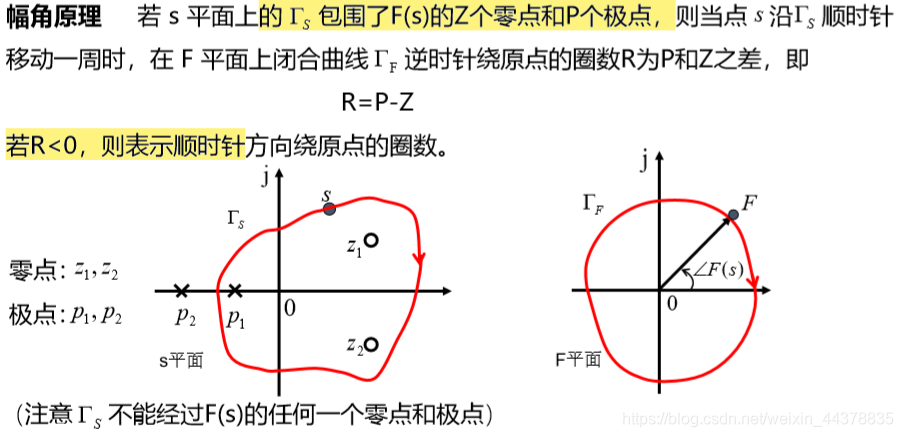
幅角原理
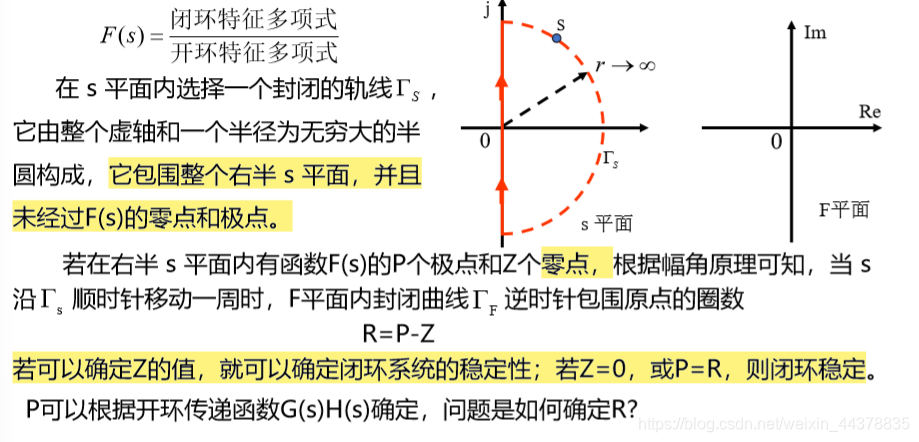
如何用幅角原理得到稳定性判定?
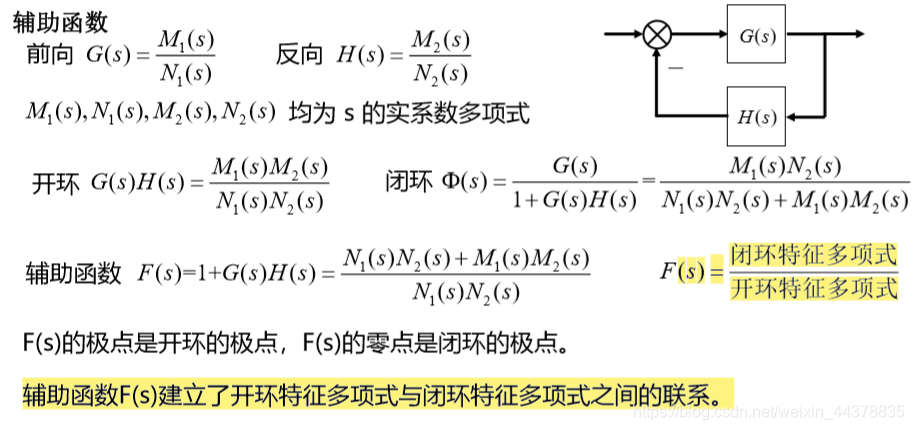
辅助函数
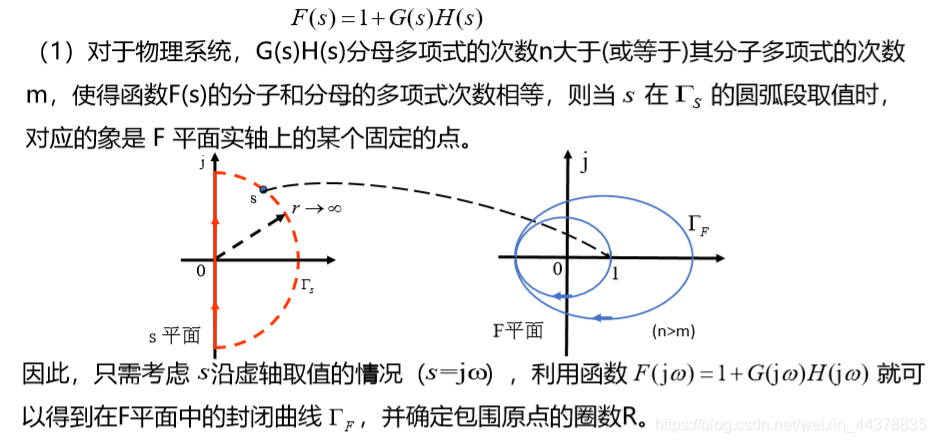
n>m时,当
时,
(图中小圆)
当n=m则趋于一个常数。(图中大圆)
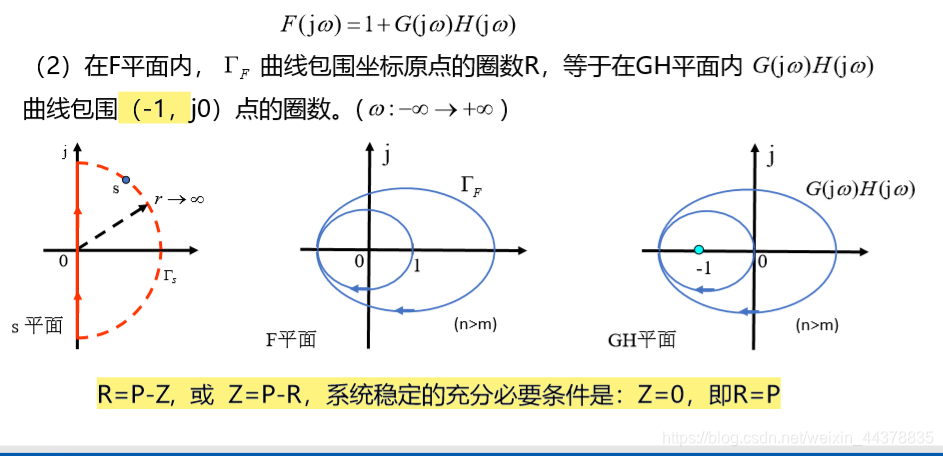
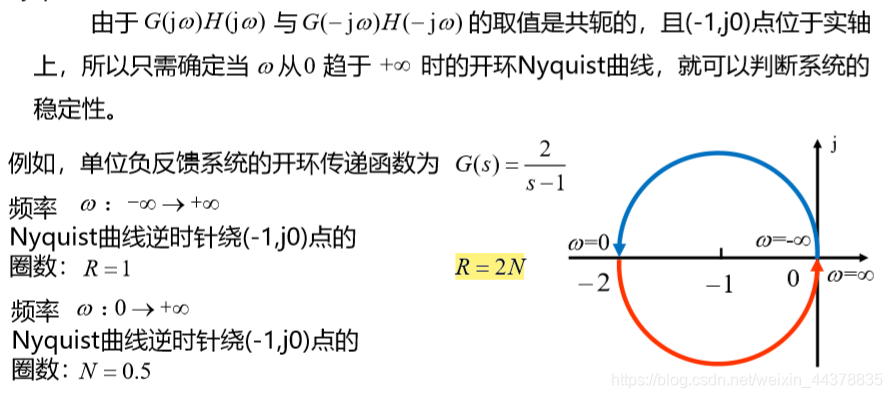
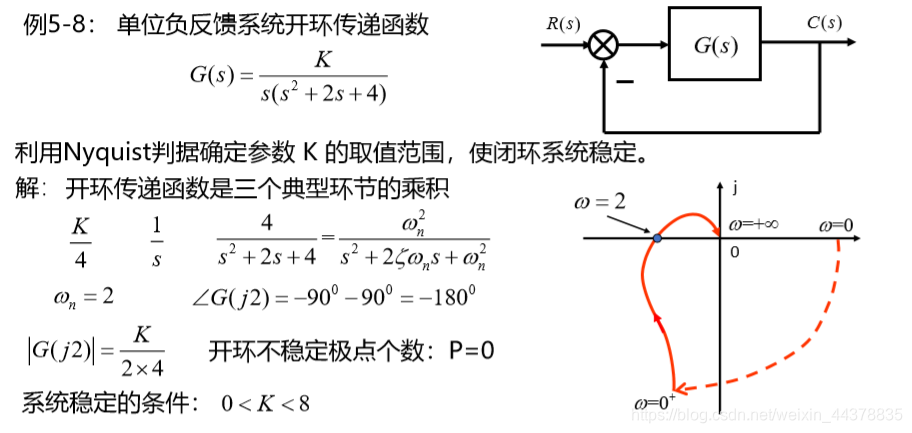
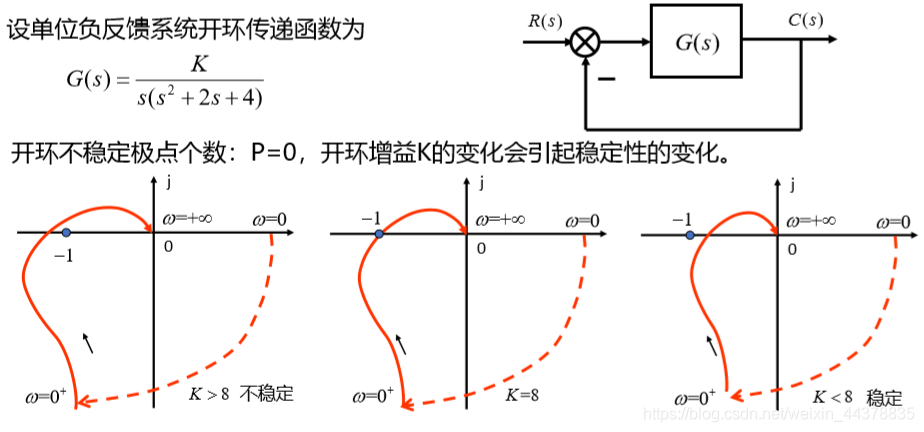
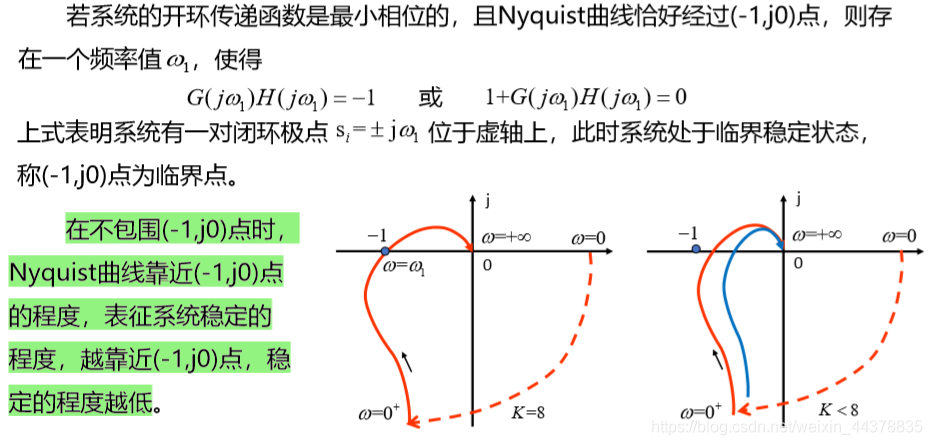
Nyquist 稳定判据
闭环系统稳定的充要条件:当频率
由
变到
时,开环幅相特性曲线 逆时针绕
点转过P圈,P为开环传递函数位于s右半平面的极点个数。
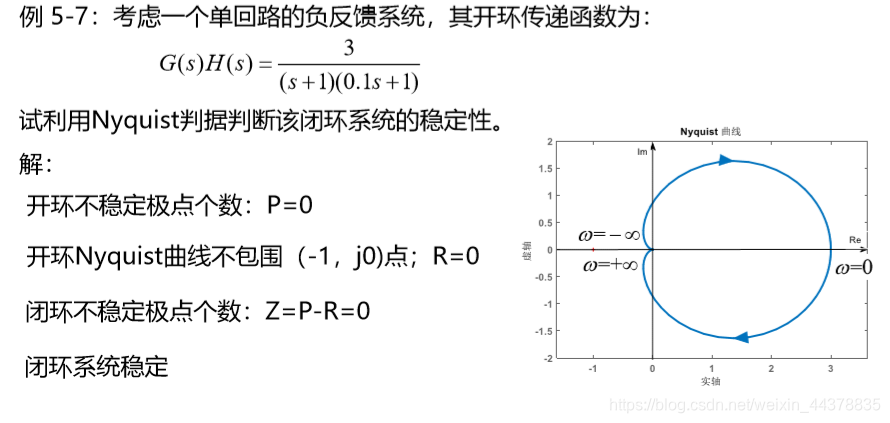
若系统开环稳定,即
,则当开环幅相特性曲线不包围
点时,系统闭环稳定。
若闭环系统不稳定,则闭环在右半s平面的极点数为
其中R为开环幅相特性曲线逆时针绕(-1,j0)点的圈数,若R<0,则为顺时针绕(-1,j0) 点的圈数
开环传递函数含积分环节的情况(含有s=0的极点)
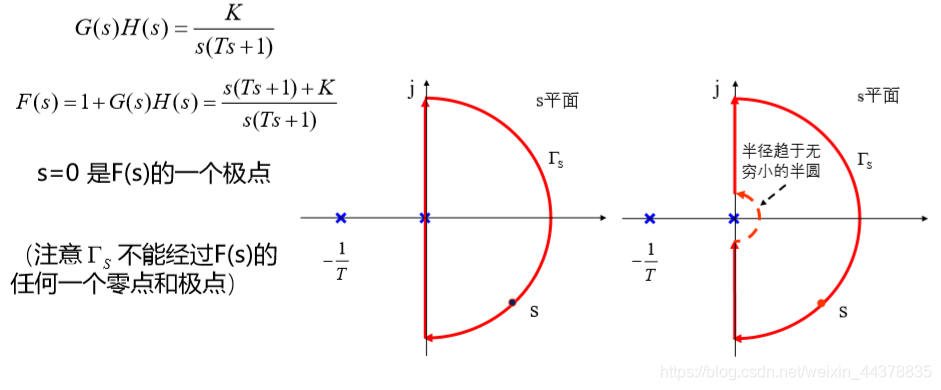
不能经过极点,则进行如右图的修正。
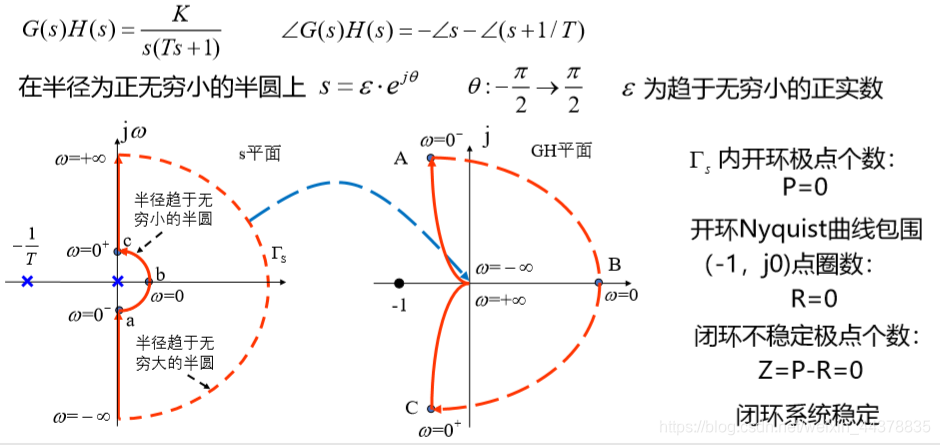
Nyquist曲线的对称性
Nyquist 稳定判据
闭环系统稳定的充要条件:当频率
由0变到
时,开环幅相特性曲线逆时 针绕
点转过
圈,P为开环传递函数位于s右半平面的极点个数。
若系统开环稳定,即P=0,则当开环幅相特性曲线不包围
点时,系统闭 环稳定。
若闭环系统不稳定,则闭环在右半s平面的极点数为
其中N为频率 由0变到 时,开环幅相特性曲线逆时针绕(-1,j0)点的圈数,若 N<0,则为顺时针绕(-1,j0)点的圈数。
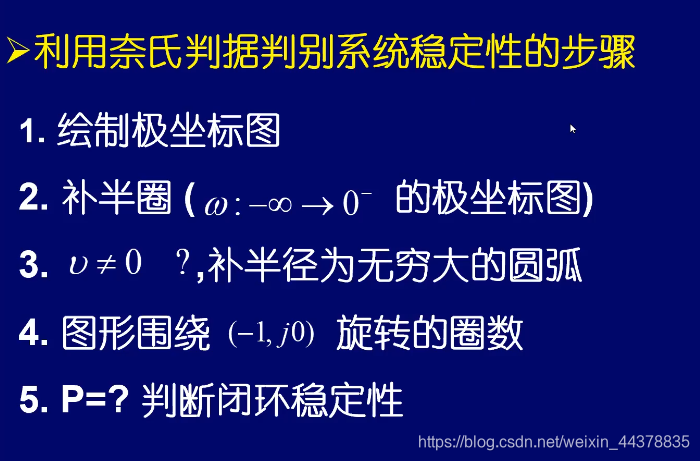
F 频率稳定判据(2)
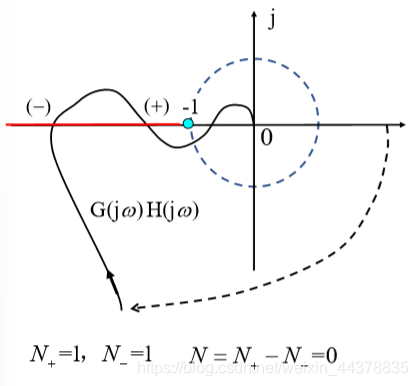
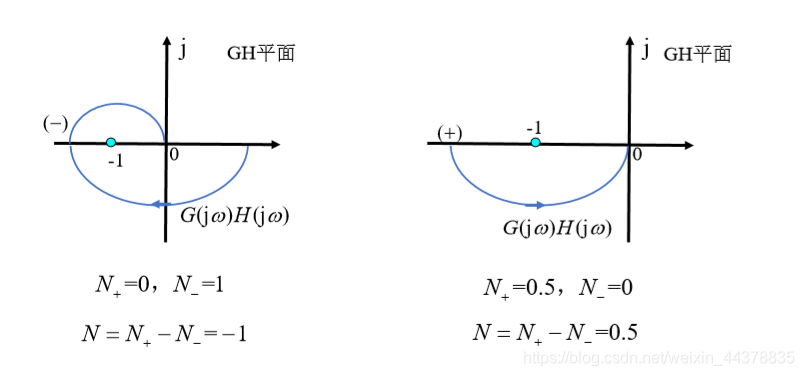
1 确定开环Nyquist曲线逆时针绕(-1,j0)点的圈数N
正穿越次数
: 曲线沿
增加的 方向,由上向下穿越负实轴的
段的次数, 若
从负实轴
上某一点开始向 下,称为半次正穿越。
负穿越次数
: 曲线沿
增加的 方向,由下向上穿越负实轴的
段的次数, 若
曲线从负实轴
段上某一点 开始向上,称为半次负穿越。
穿越的次数:
 在对应的对数曲线确定N
在对应的对数曲线确定N
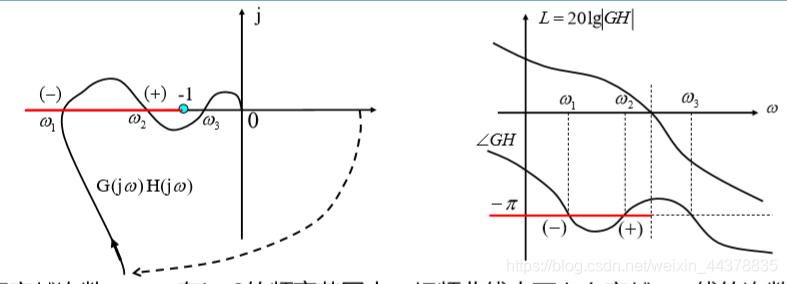
正穿越次数, : 在
的频率范围内,相频曲线由下向上穿越
线的次数。 (对于相频曲线从
线开始向上的情况,称为半次正穿越 。)
负穿越次数, : 在
的频率范围内,相频曲线由上向下穿越
线的次数。 (对于相频曲线从
线开始向下的情况,称为半次负穿越。)
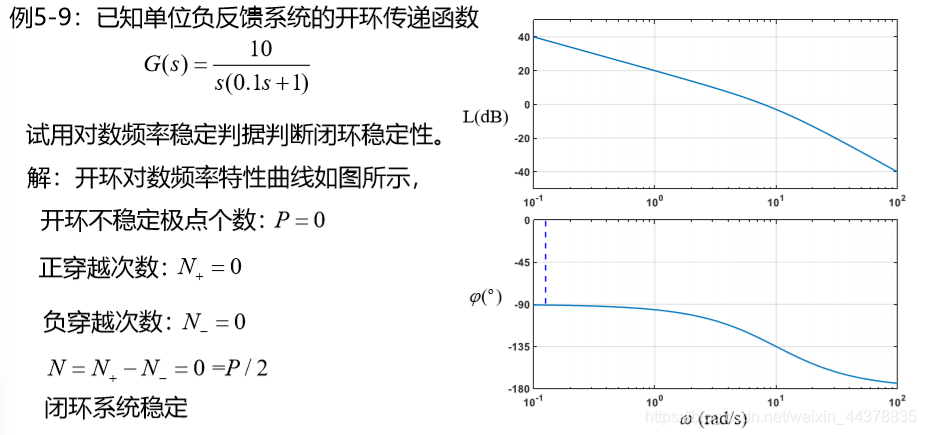
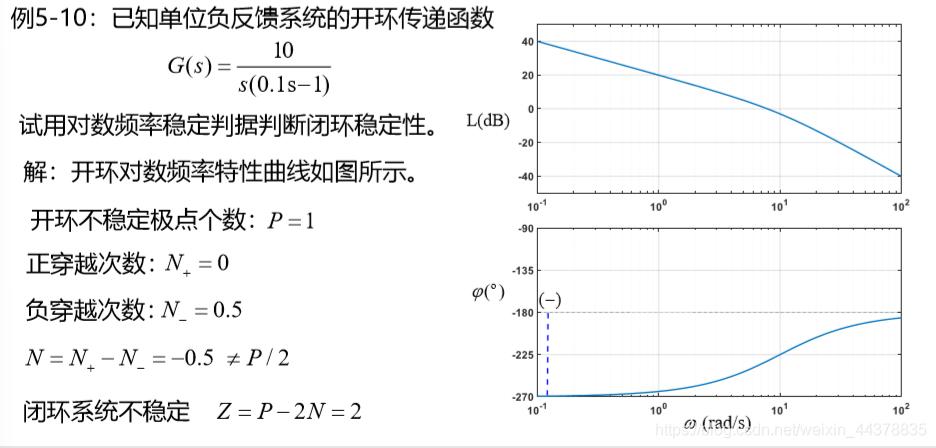
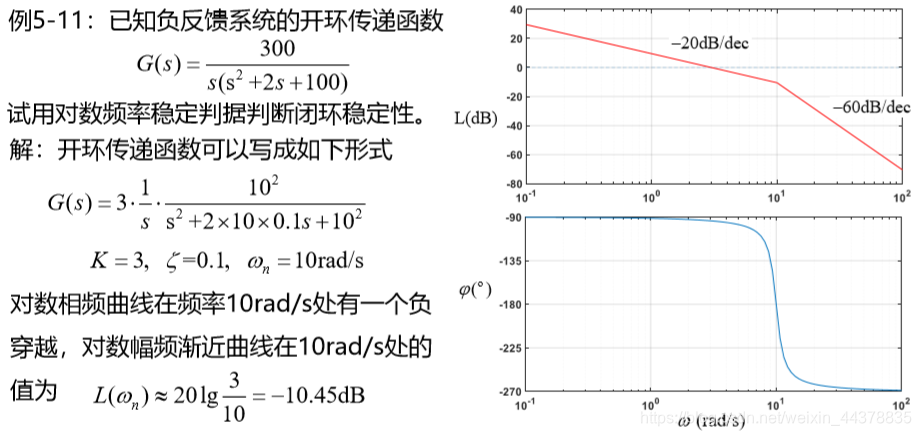
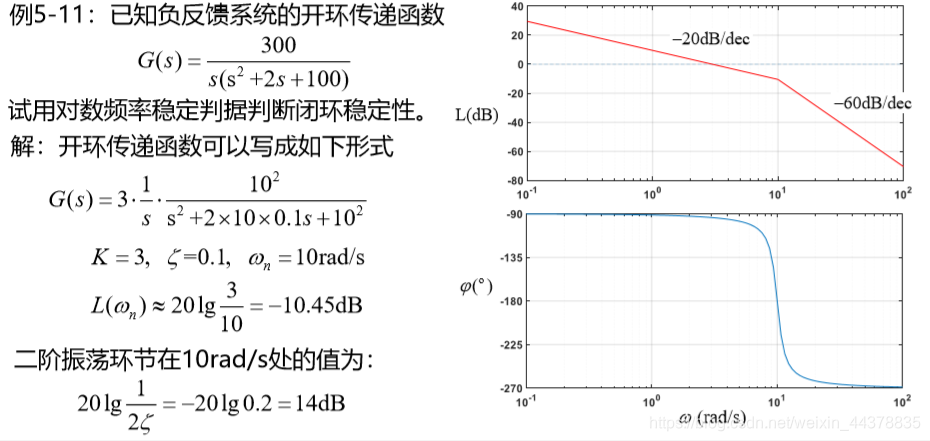
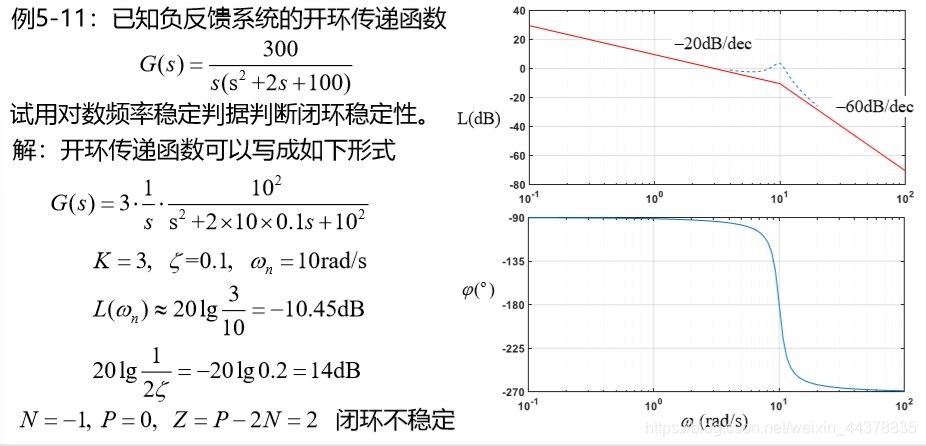
闭环系统稳定的充分必要条件:
在开环对数幅频
的频率范围内,对应的开环对数相频特性曲线 对
线的正、负穿越次数之差
,其中
是开环不稳定极点的个数。
10:0度;
,所以角度范围为
虚线:积分环节在奈奎斯特曲线无穷大四分之一的半圆(角度为0~-90)
 |
 |
 |
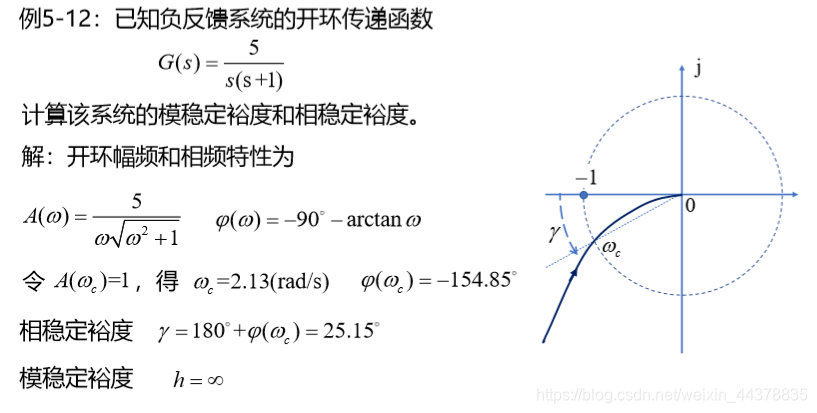
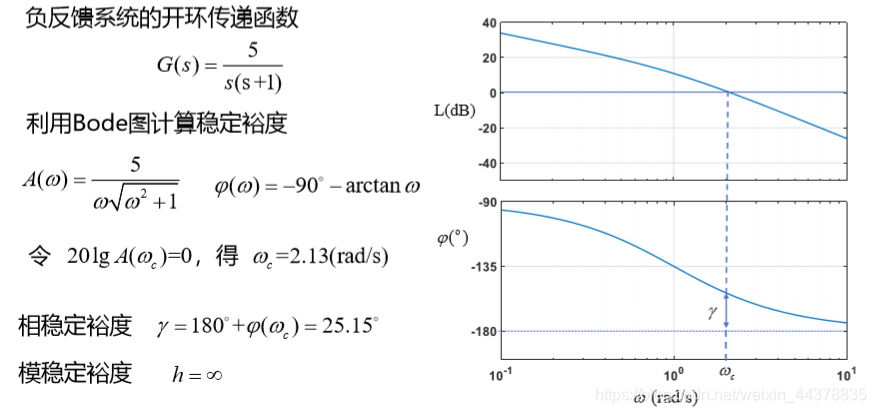
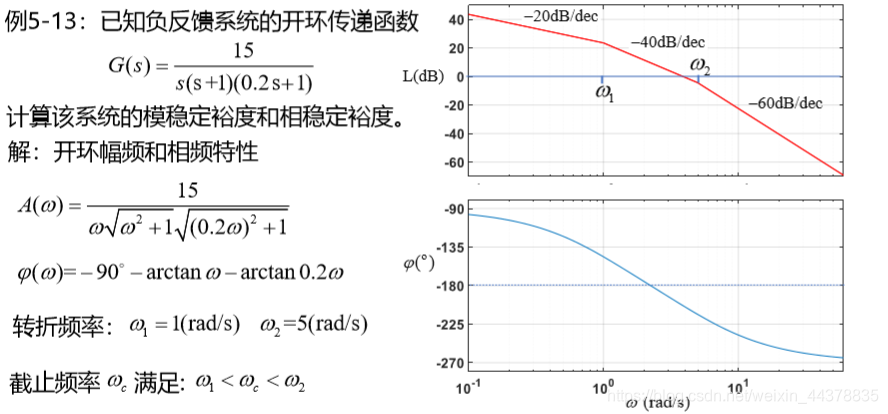
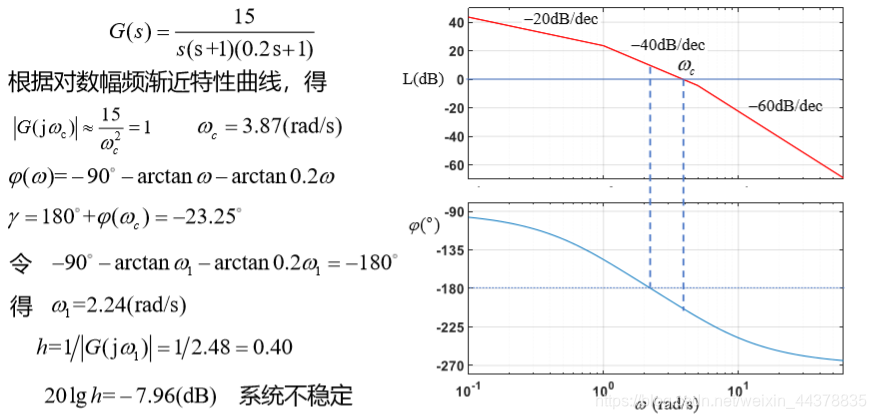
G 稳定裕度
稳定裕度引例:
 |
 |
稳定裕度是衡量闭环系统稳定程度的指标,具体分为相稳定裕度和模稳定裕度。
设系统的开环传递函数是最小相位的,则相稳定裕度定义为
其中,频率
称为截止频率,满足以下条件:
当
,系统稳定。
当
,系统不稳定。
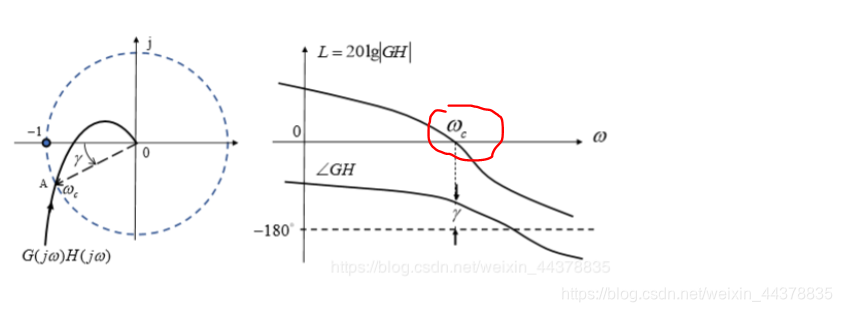
点,稳定性越差。
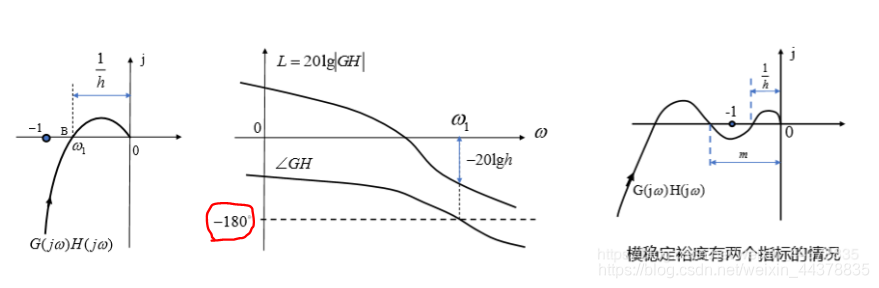
设系统的开环传递函数是最小相位的,则模稳定裕度定义为:
或
其中,频率
称为穿越频率,满足以下条件:
当
系统稳定;
当
系统不稳定。
m越大,h越大,系统越稳定
 |
 |
 |
 |
H 闭环、开环频率特性与阶跃响应的关系(略)
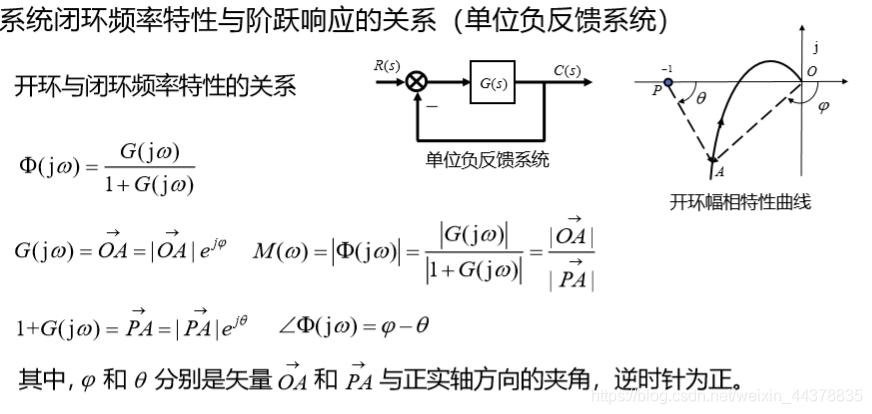
OA:分子向量;PA:分母向量;
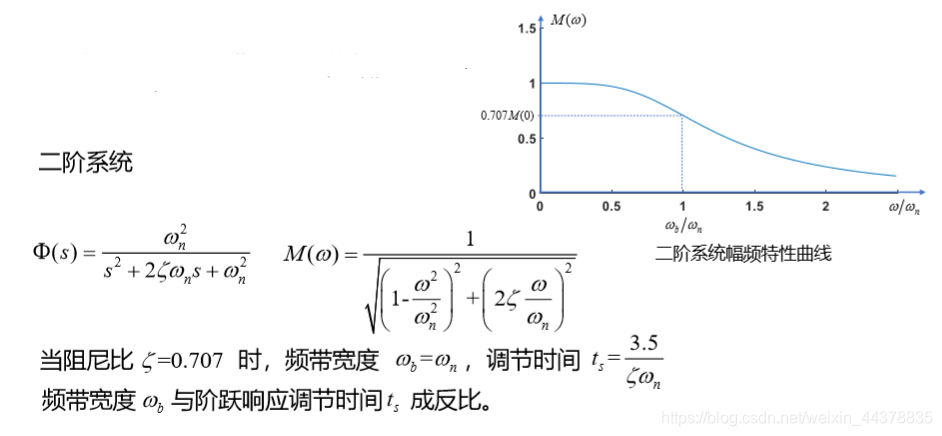
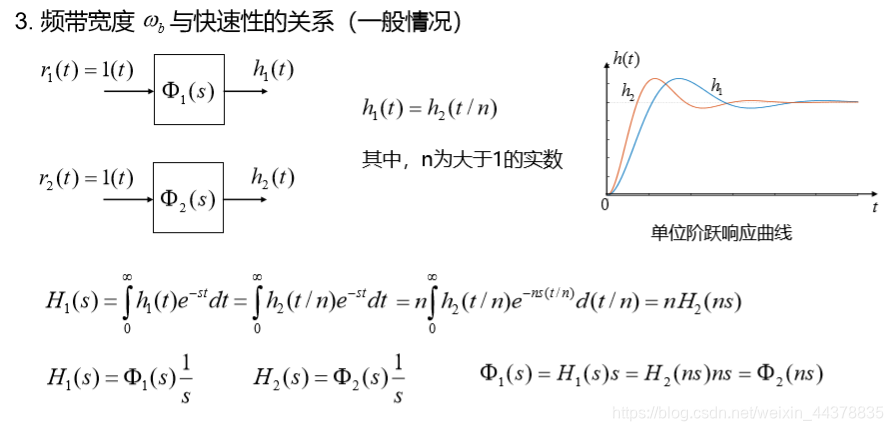
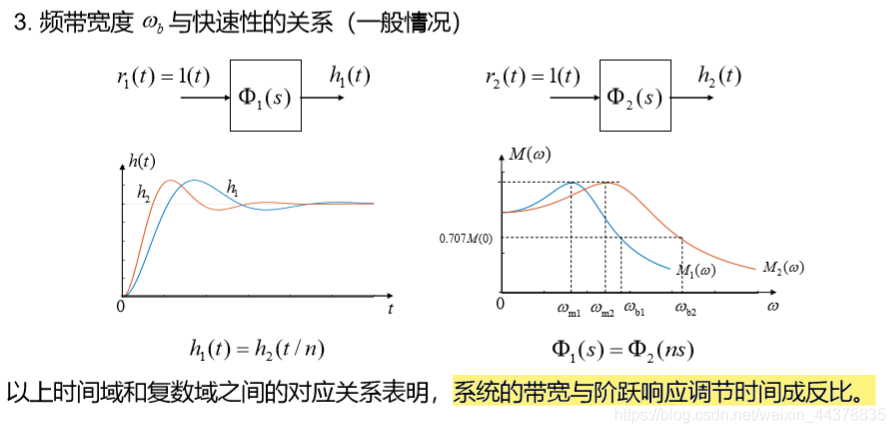
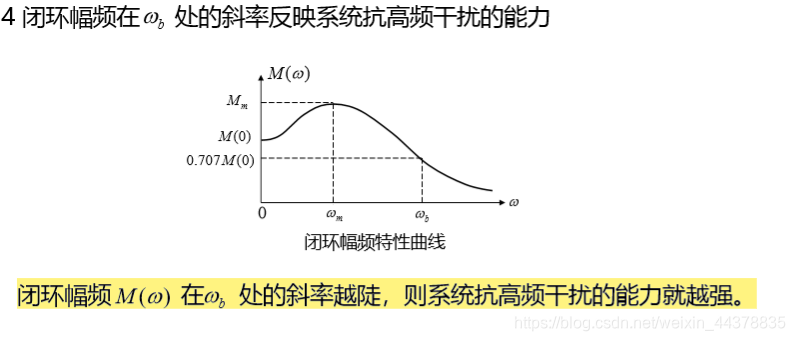
在闭环系统稳定的基础上,利用闭环频率特性,对系统的动态过程的平稳性、快速 性和稳态精度进行分析和估算。
 |
 |
 |
 |
 |
 |
 |
 |
 |
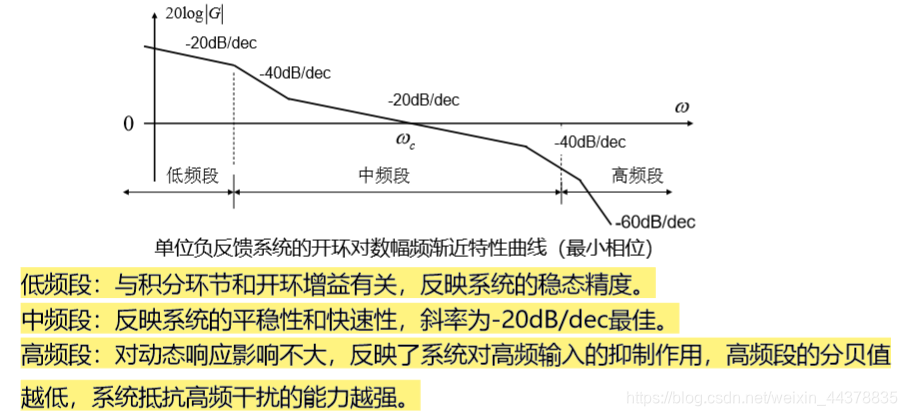
开环频率特性与阶跃响应的关系(单位负反馈系统)
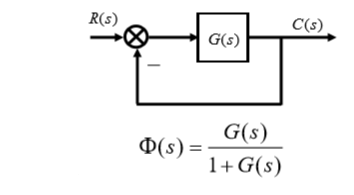
若开环传递函数是最小相位的,则可以根据其对数幅频 特性曲线近似分析闭环的阶跃响应。通常将开环幅频特性曲 线分成三段。
1、低频段:指小于最小的转折频率的区段,与积分环节和开环增 益有关,反映系统的稳态精度。
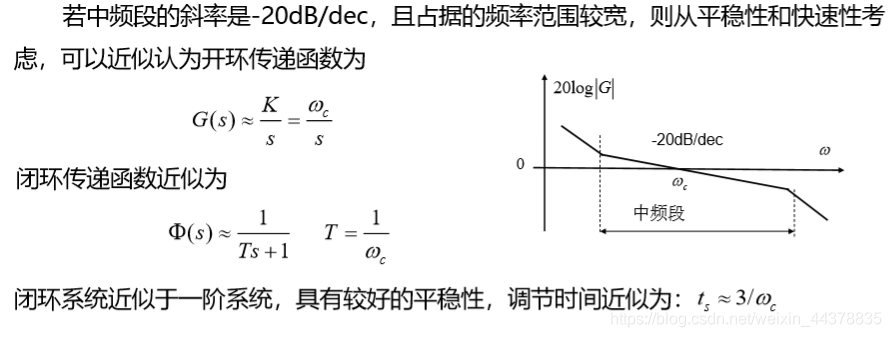
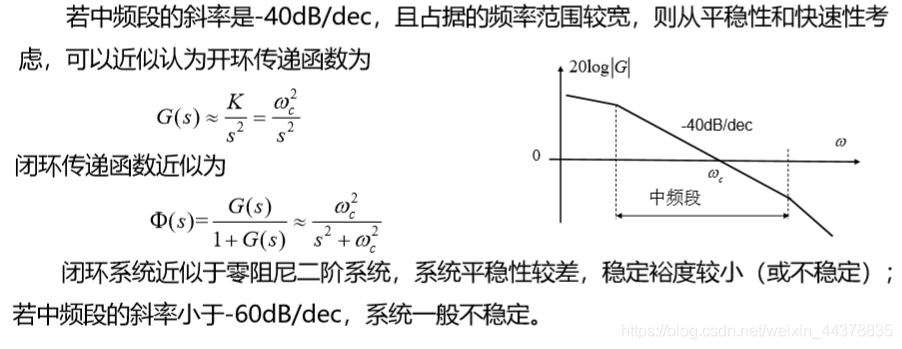
2 中频段:指开环幅频特性曲线在截止频率
附近的区段,该段反映系统的平稳性 和快速性。
 |
 |
3 高频段:指开环幅频特性曲线在中频段之后(
)的区段,由系统中时间常数 较小的部件决定,对动态响应影响不大。